







前言
在Simulink中,经常会遇到求导的问题。例如:在车辆动力学建模中,已知了速度,求加速度。
加速度,是速度对时间t的导数,也就是对速度求导,那如何对速度进行求导呢?那就要用到Discrete Derivative模块
一、Discrete Derivative
Discrete Derivative的官方解释是:计算离散时间导数。意思就是:求离散时间信号的导数,即信号在离散时间采样点之间的变化速率。公式如下:
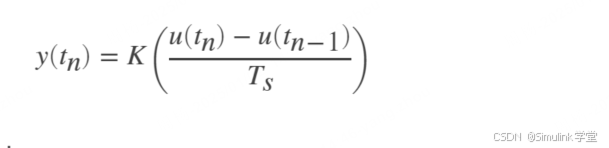
其中
y(tn)是当前时间输出
u(tn)和u(tn-1)是当时时间和上一时刻的输入
Ts是模型的仿真步长(定步长,固定值)
K是一个增益量(一般令K=1)
二、建模
1.搭建模型
模型如下
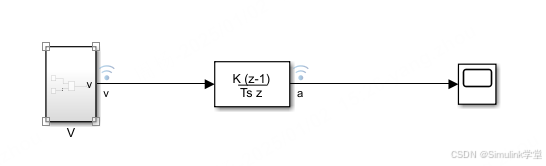
子系统V仿真的是速度随时间的变化,v=2t,在求导得出速度。分别记录速度和加速度的图像,使用Data Inspector来进行分析。
模型求解器设置如下:定步长,离散型,仿真步长为0.002,Stop time=0.2s。
仿真结果
图1
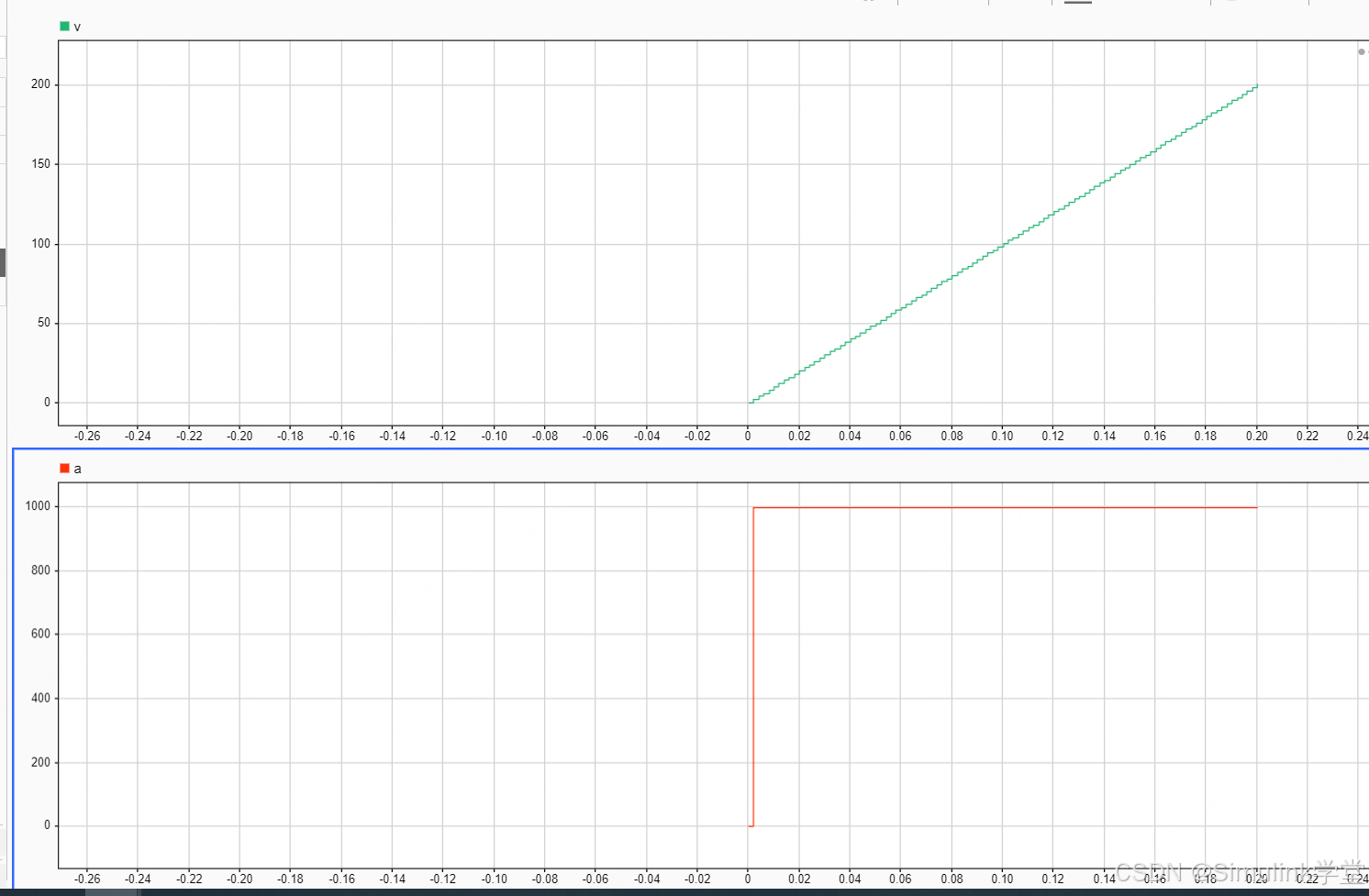
图2

2.分析数据
速度随时间是按照2的倍数变化,所以速度的变化量为2,Ts=0.002,按照y(tn)计算公式,速度的变化率为1000。
但是,我们也能发现,在第一个步长时间内,速度发生了突变,这是我们在实际建模中必须要考虑的问题。关于如何处理速度发生突变的问题,会引出滤波,在下一篇博客会解决这个问题。
总结
以上就是今天要讲的内容,本文介绍了Discrete Derivative的使用以及实际存在的缺陷,后期会针对这个问题给出解决方案。

















 1618
1618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









