







参考视频:simulink1.1simulink简介_哔哩哔哩_bilibili
六、连续系统与离散系统的转换
1、连续传递函数转换为离散传递函数
(1)借助billinear函数,可以将连续传递函数通过双线性变换法变成相应的离散传递函数。

①一般形式连续传递函数转换为离散传递函数:第一个参数为连续传递函数分子多项式系数,第二个参数为连续传递函数分母多项式系数,第三个参数为采样频率,billinear函数根据参数返回离散传递函数的分子多项式系数和分母多项式系数。

②零极点增益形式连续传递函数转换为离散传递函数:第一个参数是连续传递函数零点集,第二个参数是连续传递函数极点集,第三个参数是连续传递函数增益,第四个参数是采样频率,billinear函数根据这四个参数构造出零极点增益形式的离散传递函数。(值得注意的是,前两个参数需要是列向量,否则会认为是连续传递函数分子/分母多项式系数向量,这里没有介绍bilinear的可选参数fp——通带截止频率,所以不做过多解释)

③状态空间形式连续传递函数转换为离散传递函数:前四个参数是连续传递函数的A、B、C、D四个矩阵,第五个参数是采样频率,billinear函数根据这五个参数构造出状态空间形式的离散传递函数。

(2)使用c2d函数也可以将连续域的传递函数转换为离散域的传递函数,其中第一个参数(或前两个参数)为连续时间系统的传输函数(或状态空间模型的A、B矩阵),下一个参数为采样时间间隔,最后一个参数为可选参数,用于指定变换方法(默认为零阶保持zoh,除此之外还有三角逼近foh、脉冲不变离散impulse、双线性变换tustin和零极点匹配matched);c2d函数返回离散时间系统的传输函数(或状态空间模型)。


2、离散传递函数转换为连续传递函数
使用d2c函数可以将离散域的传递函数转换为连续域的传递函数,其中第一个参数为离散时间系统的传输函数,或前三个参数为状态空间模型的A、B矩阵及采样时间间隔,如果参数采用离散时间系统的传输函数(即不采用状态空间模型),下一个参数为用于指定变换方法的可选参数,如果参数采用状态空间模型,下一个参数为采样时间间隔;d2c函数返回连续时间系统的传输函数或状态空间模型。


七、惯性环节与超前滞后环节
1、Transfer Fcn First Order惯性环节(一阶滞后环节)
(1)在实际的物理系统中往往存在一定的惯性,这个惯性导致的滞后不同于延迟模块的滞后,要想模拟这种惯性,可以采用惯性环节,双击惯性环节即可进行相关配置。

(2)如下例所示,经过惯性环节的输出信号虽然和输入信号都呈增长趋势,但二者存在一定差距,在实际系统中这个差距就是惯性所导致的。

2、Transfer Fcn Lead or Lag超前滞后环节(超前或滞后补偿器)
(1)当传递函数的零点大于极点,且都在区间(0,1)时,该环节是超前补偿器,相角大于0;当传递函数的零点小于极点,且都在区间(0,1)时,该环节是滞后补偿器,相角小于0。

(2)下例所示的是一个超前补偿器,输出信号超前于输入信号。

3、补偿器实例演示
(1)下图所示的是一个超前补偿器的物理电路图。(右下图将电容写成了容抗的形式)

(2)根据基尔霍夫定律,可得出以下关系:

(3)对上述关系式做一定的调整,可得到如下传递函数,为简单起见,假设电阻的阻值为1Ω,电容的容值为1F,传递函数将得到简化。

(4)借助bilinear函数得出离散域下的传递函数,然后在simulink中进行仿真。


八、记忆模块、零阶保持器、一阶保持器
1、memory记忆模块
记忆模块可实现当前时刻的输出等于上一采样时刻的输入的功能,该模块需要设置初始条件,也就是t=0时刻的“上一采样时刻”输入。


2、Zero-Order Hold零阶保持器
零阶保持器可将连续时间信号转换为离散时间信号,在信号传递过程中,它把第nT时刻的采样信号值一直保持到第(n+1)T时刻的前一瞬时,把第(n+1)T时刻的采样值一直保持到(n+2)T时刻,以此类推(T为采样时间间隔)。


3、First-Order Hold一阶保持器
一阶保持器也可将连续时间信号转换为离散时间信号,在信号传递过程中,它把第nT时刻的信号值采集,而将第nT时刻信号值的变化率一直保持到第(n+1)T时刻的前一瞬时,然后把第(n+1)T时刻的信号值采集,而将第(n+1)T时刻信号值的变化率一直保持到(n+2)T时刻,以此类推(T为采样时间间隔)。


九、离散PID控制模块
1、Discrete PID Controller模块
(1)离散PID控制模块的用法和连续PID模块的用法有诸多相似之处,下面对离散PID控制模块进行简单介绍。
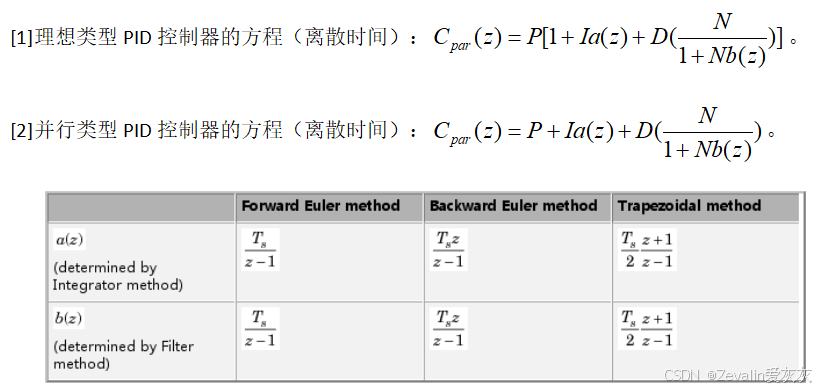
(2)离散PID控制模块可选的积分方法和过滤方法有前向欧拉法(Forward Euler)、后向欧拉法(Backward Euler)和梯形法(Trapezoidal)三种,选用的方法不同,控制器的方程也会略有不同。

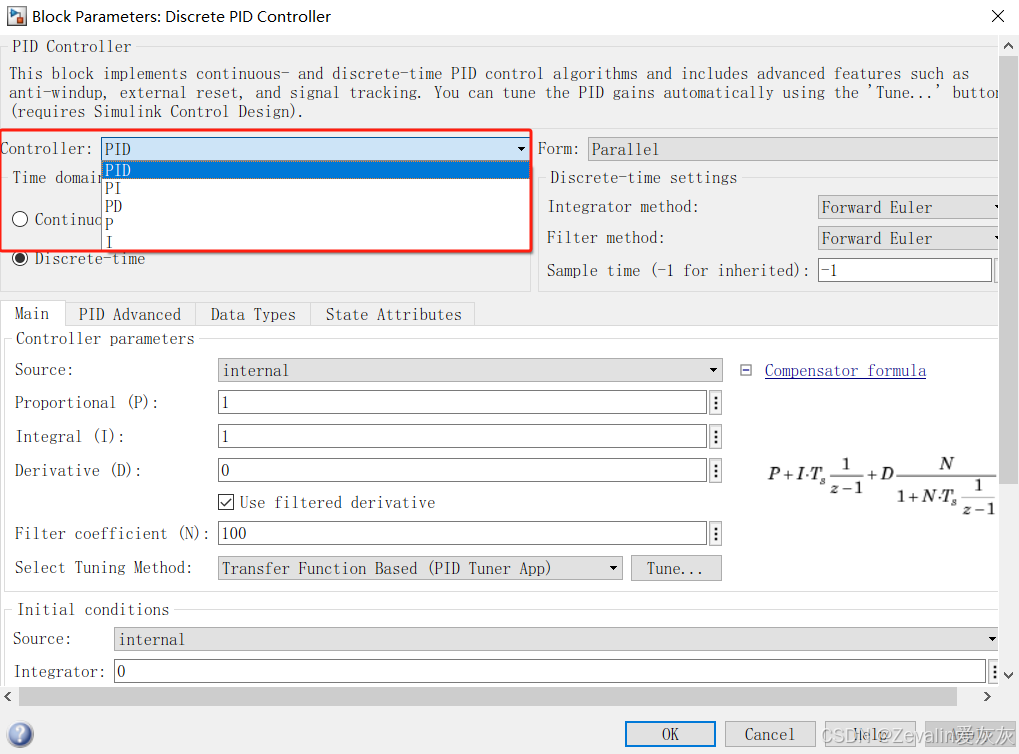
(3)双击离散PID控制模块,可打开其配置窗口。
①如下所示,可以配置比例参数(Proportional)、积分参数(Integral)和微分参数(Derivative),并且可以设置初始条件(Initial conditions)、外部重置功能(External reset),后两个设置在积分模块中曾介绍过,和离散PID控制模块大同小异,这里不再赘述。

②点击“Tune...”按钮,可以打开PID调节器以调节PID参数。


③在高级选项中,可以激活“Limit output”选项,以设置饱和上下限以及抗饱和方法(Anti-windup method),另外还可使能追踪模式(勾选“Enable tracking mode”),并配置追踪系数。

④PID控制器的类型可以是理想的(Ideal),也可以是并行的(Parallel)。

⑤PID控制器有PID、PI、PD、P、I五种形式可选。
2、Discrete PID Controller(2DOF)二自由度离散PID控制器模块
(1)二自由度离散PID控制器模块与离散PID控制器模块不同的是,二自由度离散PID控制器模块增加了一个参考输入端口,可以双击二自由度离散PID控制器模块,设置参考点(Setpoint)。

(2)二自由度离散PID控制器模块允许使用参考点作为加权,以实现平稳的设定点跟踪和良好的干扰抑制。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











