









目录
Focus distance与Focal length的区别
曝光值(Exposure Value,EV)和曝光量(photometric exposure , H)
这一篇主要学习一下现实中相机有关的一些概念和它们的解释,为下一篇理解游戏中的相机以及景深的实现,以及后面游戏场景的打光等等做一些准备

焦点(focus)/焦距(focal length)
焦距是指平行光入射时从透镜光心到光聚集之焦点的距离,是焦点到面镜的中心点之间的距离。
而照相机的成像原理依赖于凸透镜的成像规律:当物距大于2倍焦距时,则像距在1倍焦距和2倍焦距之间,成倒立、缩小的实像。此时像距小于物距,像比物小,物像异侧。
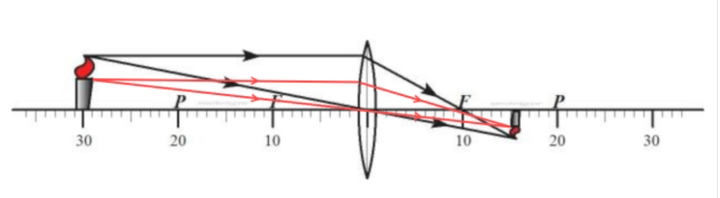
焦距越小,表明聚光能力越强,反之,焦距越大,聚光能力越弱,焦点就越靠后
镜头的焦距决定了该镜头拍摄的被摄物体在成像平面上所形成影像的大小。假设以相同的距离面对同一被摄体进行拍摄,那么镜头的焦距越长,则被摄体在胶片或影像传感器上所形成的影像的放大倍率就越大。因为相机 像距都是比 焦距大的,同样的距离,意思物体到镜头的光线固定,焦距越长,聚光能力越差,镜头后面相交的点更远,放大倍率就越大
Focus distance与Focal length的区别
这两个概念在一些文章里,也经常会混淆着说,这里区分一下
focal length:焦距
focal distance:对焦距离,物象之间的距离,是镜头到物体的距离与镜头到感光元件的距离之和。就是一开始图片里面 焦点平面(focal plane) 的距离
焦距是一个镜头的基本属性,一般在8mm到1000mm之间;而对焦距离是通过镜组的微调来改变的,一般镜头上都会标上一个最近对焦距离,从这个距离至无穷远都属于对焦距离的范围
弥散圆(Circle of Confusion)
参考:Reference2
在焦点前后,光线开始聚集和扩散,点的影象变成模糊的,形成一个扩大的圆,这个圆叫做弥散圆。
在现实当中,观赏拍摄的影象是以某种方式(比如投影、放大成照片等等)来观察的,人的肉眼所感受到的影象与放大倍率、投影距离及观看距离有很大的关系,如果弥散圆的直径小于人眼的鉴别能力,在一定范围内实际影象产生的模糊是不能辨认的。这个不能辨认的弥散圆就称为容许弥散圆(permissible circle of confusion)。
一般常用的画幅尺寸和对应的需求的弥散圆直径
| 画幅 | 24mm x 36mm | 6cm x 9cm | 4" x 5" |
| 弥散圆直径 | 0.035mm | 0.0817mm | 0.146mm |
如上看到 一般常说的 35 mm 的胶片,也就是 24mm* 36mm 规格的胶片,允许的 弥散圆直径 是 0.035mm
或者换一个说法,人眼观看一张在明视距离25厘米的照片,可以分辨出不小于1/4毫米的圆斑, 这里参考https://zh.wikipedia.org/wiki/%E6%99%AF%E6%B7%B1
如果这张照片是一张从35毫米胶卷放大的8x10英寸照片,放大倍数为8,那么在胶卷上与放大照片上0.25毫米像对应的容许弥散圆的直径为 1/4 mm 再 除以8 约等于 1/30 毫米,这就是一般35毫米相机取模糊圈为 1/30 毫米的由来。
其实这里也不是正好的 8倍, 8 inches = 25.4mm*8 = 203.2 mm 除以原本 24mm = 8.4 其实大于8,所以这个说法是个很粗略的约等于。
如果35毫米胶卷放大16倍,即 16 X 20 吋,而观看距离增加到50厘米,弥散圆仍能保持 1/30 毫米。
现实中是因为人眼的物体特性,先决定了容许弥散圆的大小,然后去调整相机的各项物理参数,但游戏中为了模拟景深常常是先有其他物理参数,然后计算一个容许弥散圆的大小来表现一些很夸张的效果。
景深(Depth of Field)
在被摄主体(对焦点)前后,其影像仍然有一段清晰范围的,就是景深。换言之,被摄体的前后纵深,呈现在底片面的影象模糊度,都在容许弥散圆的限定范围内。
景深随镜头的焦距、光圈值、拍摄距离而变化。对于固定焦距和拍摄距离,使用光圈越小,景深越大。
|
|
以持照相机拍摄者为基准,从焦点到近处容许弥散圆的的距离叫前景深,从焦点到远方容许弥散圆的距离叫后景深。
景深和焦深
这里注意区分 景深和焦深的区别,被摄物体前后(成像小于弥散圆大小)的距离是景深,镜头焦点前后(成像小于弥散圆大小)的距离是焦深
景深公式推导
图像来源 WIKI

推导过程主要联立几个方程式
(1)由下面提到的F 数的定义可以得到, 光圈直径 , d 是光圈直径,f 是焦距,F是 光圈值
(2)光学透镜公式,得到,v是像距,s是物距
(3)后物体成像
(4)前物体成像
(5)后物体三角形相似性,d是光圈值经,c是容许弥散圆直径
(6)前物体三角形相似性,d是光圈值经,c是容许弥散圆直径
联立 6 个公式,可以得到
后物体位置
后物体位置
从而得到
前景深
后景深
最终的景深公式
注意这里的分母的 +或-,跟是 f-s 还是 s-f 有关,因此看到别的表示可能会不太一样。
光圈数( F 数)
光圈数即F数(F number),是 焦距/光圈直径 ,即相对孔径的倒数,因为相对孔径是说 光圈直径/焦距。
参考 F number
| F数 | 1.4 | 2 | 2.8 | 4 | 5.6 | 8 | 11 | 16 | 22 |
| 平方值 | 2 | 4 | 8 | 16 | 32 | 64 | 128 | 256 | 484 |
像面上的光强反比于F数的平方,在相同环境下拍摄同一个物体,后一档要比前一档的需要的曝光时间增加一倍,
这里平方是因为 到达像面(感光胶片)上的光强,不仅与镜头的通光面积成正比(即正比于光圈直径D的平方),而且还与像面的面积成反比,即像面面积越小,光能量越集中,像面接收到的光强越大。
所以,一般情况下,像面接收到的光强正比于
,所以这里的 F 数 采用 根号后的表述,F 小,证明 光圈直径大,就是通光面积大,需要的曝光时间少,适合不稳定的移动拍摄,使用较快的快门速度。
一般来说,F值越小,镜头的适用范围就越广。
快门速度(曝光时间)
相比光圈是 控制光线进入相机的光量,快门能够控制 这些光量持续进入相机 多少时间,也就是曝光时间,而 下面说到 的 ISO 则控制 感光元件 对于这些进来的 光 有多灵敏

快门的本质就是一个开关,开一次,关一次,中间留给光进来的时间就是曝光时间,区分就是不同的制作方式里面,快门开关的方式不一样
因为快门遮挡感光区域,从开始到结束,总是有过程的,此时就会导致暗角的发生,就是有的区域受光多了,有的区域少了
比如最开始的镜前快门,就是从两边往中间关,那中间就会比两边受光区域长一点,那就会出现曝光不均匀的问题。
不同的快门种类控制快门速度的方式是不一样的,因此再看一下快门的分类
按照快门在相机中的位置
- 镜前快门,放在镜头的前面,目前手机照相机的机械快门结构,几乎都是镜前快门
- 镜间快门,许多中档35毫米相机、中幅双反相机、和近代的简便35毫米相机,APS相机都用镜门

- 镜后快门,再往后放一些,使用并不多

蔡司伊康 TENAX II相机的镜后快门
- 焦平面快门,也在镜后,但离焦平面很近,所以得名,基本原理是使用两块金属幕帘,一起横向或者纵向移动,按照两片幕帘启动的时间差,中间会留下缝隙,这条缝隙就是透光区域,扫过哪块,哪块曝光,而要实现不同的快门速度,控制曝光时间,一个就是两块幕帘的移动速度,当移动速度达到上限,还可以调整两片幕帘启动的时间差,不同的时间差,中间缝隙大小不同,曝光大小也就不同,比如想要更快的快门速度,更小的进光量,把缝隙调小就可以,现在绝大部分的数码单反相机所采用的都是这种快门。

另外按照快门的构造分类,可以分成
- 机械快门
- 电子快门
- 电子断流快门
ISO 感光度
ISO 用于控制 感光元件 对于这些进来的 光 有多灵敏,感光速度有多快,一般以 ISO + 数字表示,数字越大,表示感光性越强,比如 ISO 100,ISO 200,ISO 400等等。
一般而言,传统相机感光度越高,底片的颗粒越粗,放大后的效果较差,这是因为传统胶片的原理是未经曝光的胶卷遇到光线,胶片上会起化学反应(和卤化银作用),根据进入光线的多少而在胶片的不同位置产生深浅不一的变化,从而在胶片上留下影像,增加感光度,就是增大底片颗粒大小,增加接触光子发生化学反应的概率。
而由于数码相机与普通照相机不同,他的感光器件是使用了CCD或者CMOS,为了方便数码相机使用者理解,一般将数码相机的CCD的感光度(或对光线的灵敏度)等效转换为传统胶卷的感光度值,因而数字照相机也就有了“相当感光度”的说法。它的原理是是通过调整感光元件对光线的灵敏程度或者合并感光点来实现的,也就是说是通过提升感光元件的光线敏感度或者合并几个相邻的像素点来达到提升ISO的目的,高感光度模式是利用到了存在噪声较大的部分,这些背景噪声反映到图像上就是随机的杂色。ISO的数值每增加1倍,其感光的速度也相应的提高1倍。比如ISO200的感光度比ISO100感光度的感光速度提高1倍,而 ISO400的感光度比ISO200的感光度提高1倍,而比ISO100的感光度提高4倍,并依次类推。
ISO的测定不同的胶片类型不一样,下面公式中 S为感光度,H为曝光量,单位是 lux,即光照度,单位面积上光通量,这个可以参考另一篇 Reference11
因为一开始ISO 就是传统胶片提出的,因此最初都是基于传统胶片测定的
黑白负片,公式为 S=0.8/H
彩色负片,公式为 S=1/H
彩色反转片,公式为 S=8/H
黑白相纸,公式为 S=1000/H
数码相机的“相当感光度”的测定以及更多的可以参考: Reference10
上文提到的正片,负片,反转片的解释参考:Reference12
曝光值(Exposure Value,EV)和曝光量(photometric exposure , H)
曝光值(Exposure Value,EV)代表能够给出同样曝光量的所有相机光圈快门组合。它的计算公式是 。
其中 F是光圈(f值);t是曝光时间(快门),单位秒。
另一个要区分的概念是曝光量,也就是上面也提到的 H,它的计算公式是 H = Et。
其中, H 是曝光量,E 是影像平面的照度,而t 是曝光时间。照度由f值所控制,但也取决于环境亮度。
而 EV0 就表示 :当感光度为ISO 100、光圈值为F1、曝光时间为1秒时,得到的曝光量为 EV0。
当曝光量减少一档时,EV值减1;曝光量增加一档时,EV值加1。
另外正如定义说的,它是同样曝光量的组合,比如 ISO200 相比 ISO100 感光速度增加一倍,但曝光时间也减少一半0.5秒得到的曝光量也是 EV0
据此推算,就可以得到在 ISO 100 固定的情况下的,所有 光圈 f 值 和所需曝光时间对应的 EV 的组合了,图片来源 Wiki

另外,尽管理论上所有曝光值相同的拍摄参数都会给出相同的曝光,但是它们并不一定能拍出完全相同的照片。
这就是上面提到的不同的光圈也会带来不同的景深,不同的弥散圆大小,因此曝光量一样,也不代表拍出来就一样。
光圈EV值和快门EV值
这里再区分一下光圈EV值和快门EV值
最后公式前半部分 就表示 光圈EV值,后半部分
就表示 快门EV值,曝光EV值 = 光圈EV值+快门EV值
单看快门 EV 值,
上面说到了相邻 F 值 是 倍的关系,透光量是一倍的关系,因此 ISO 和 曝光时间不变的情况下,相邻F值的对应EV值也是递增的
同理,当ISO 固定ISO 100,光圈固定F1的时候,快门值之间也是等比的,因此得到(图片来源Reference15)

阳光16法则
艳阳十六阴天八,
多云十一日暮四,
阴云压顶五点六,
雨天落雪同日暮,
室内球场二秒足,
客厅戏台快门八。
根据上面的 EV 值规律,就能理解了阳光16法则,在以前没有测光表的时候,人们总结了一些经验来选择F值
比如第一句,艳阳十六,就表示艳阳天,F值选择 F16,对应的 ISO 是100,快门是1/100,此时如果你使用了其他的 ISO 或者快门,按照上面的规律等比缩放就可以
EV表示的曝光补偿
日常使用,有时候会混用, EV也可能会用来表示曝光补偿
许多现代照相机都允许设置曝光补偿,并通常用EV这个词来表示。在这种情况下,EV指的是相机测光数据减去实际曝光值的差。比如+1EV的曝光补偿意味着增加一档曝光,不管是通过延长曝光时间还是更小的f值(更大的光圈..)。
在这里,EV的含义和先前刻度系统中的EV(曝光值)恰好是相反的。增加曝光对应于减少曝光值(-EV),因此+1EV的曝光补偿意味着更小的EV(曝光值);反过来,-1EV的曝光补偿的结果是更大的EV。例如,测得某一比中性灰更亮的物体的EV为16,并设定+1EV的曝光补偿以修正曝光,那么最终的拍摄参数对应于EV15(而不是17)。
镜头畸变及矫正
摄像过程中由于不同的原因,主要可能会造成两种畸变,径向畸变和切向畸变。
径向畸变
径向畸变或者叫辐射畸变,产生的原因是因为 镜片中心和两边对光线造成的弯曲程度不同导致的,一般表现为从中心往外辐射的情况。
一般径向畸变再分为桶形畸变和枕形畸变,或者两种的混合,如图从上到下依次
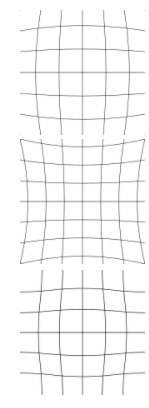
在摄影中,一般认为广角镜头容易产生桶形畸变,而长焦镜头容易产生枕形畸变。 一个摄影镜头如果反过来做投射镜头,则畸变相反——具有桶状畸变的摄影镜头,用作投射镜头时,将出现枕状畸变;反之,一个有枕状畸变的摄影镜头,用作投射镜头时,将有桶状畸变
切向畸变
切向畸变发生的原因是因为摄像机的镜片和成像平面不平行,就会导致成像畸变,具体表现为该镜头在垂直于该方向上有一个旋转角度(图像来源Reference16)。

畸变矫正,主要使用 Brown–Conrady model 以及 张氏标定法 等进行图像校正,主要是要知道畸变系数,然后做与畸变相反的变换,消除畸变,更多可以参考 Reference 16/17/18.
那...大概这样。
Reference:















 71
71











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









