









特征
本章包含允许您访问区域的不同功能的运算符。
功能列表
在下文中,说明了可用的特征。
'Area':
对象的区域

'row':
中心的行索引
'column':
中心的列索引
'row1':
左上角的行索引
“column1”:
左上角的列索引
“row2”:
右下角的行索引
“column2”:
右下角的列索引
'width':
区域宽度(平行于坐标轴)
'height':
区域高度(与坐标轴平行)

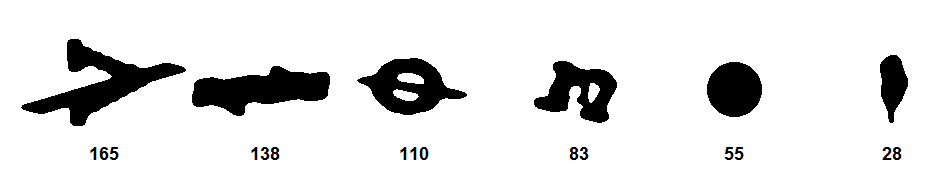
'circularity':
圆度(见circularity)
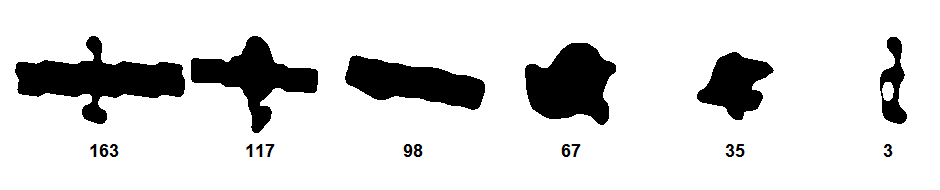
'compactness':
紧凑性(见compactness)

'contlength':
轮廓总长度(参见 operator contlength)

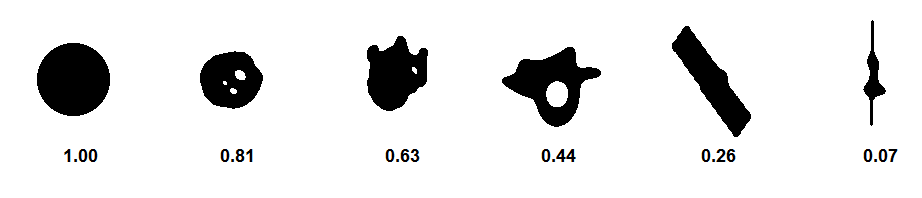
“convexity”:
凸性(见convexity)

“rectangularity”:
矩形(见rectangularity)

'ra':
等效椭圆的主半径(参见elliptic_axis)

'rb':
等效椭圆的次半径(参见elliptic_axis)

“phi”:
等效椭圆的方向参见elliptic_axis)

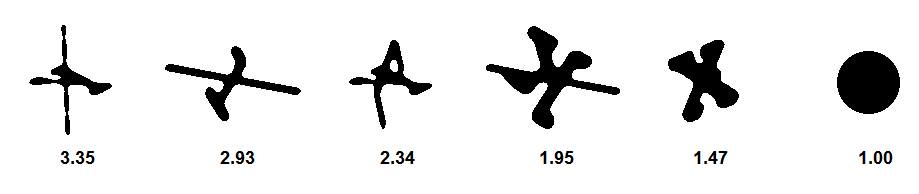
“anisometry:”
反分析法(见 eccentricity)

“bulkiness:”
庞大(参见操作员 eccentricity)
'struct_factor:'
结构因素(参见操作员 eccentricity)

'outer_radius':
最小周围圆的半径(见smallest_circle)

'inner_radius':
最大内圈的半径(见inner_circle)

'inner_width':
适合该区域的最大轴 - 平行矩形的宽度(请参阅inner_rectangle1)
'inner_height':
适合该区域的最大轴平行矩形的高度(参见inner_rectangle1)

'dist_mean':
从区域边界到中心的平均距离(参见运算符 roundness)

'dist_deviation:'
从区域边界到中心的距离偏差(参见运算符 roundness)

“roundness”:
圆度(参见运算符 roundness)

'num_sides':
多边形边数(参见运算符roundness)

'connect_num':
连接组件的数量(请参阅operator connect_and_holes)

'holes_num':
孔数(参见operator connect_and_holes)

'area_holes':
对象的孔的面积(见操作area_holes)

'max_diameter':
区域的最大直径(参见operator diameter_region)

'orientation':
区域的方向(参见operator orientation_region)

'euler_number':
欧拉数(见运算符euler_number)

'rect2_phi':
最小周围矩形的方向(参见operator smallest_rectangle2)

'rect2_len1':
最小周围矩形长度的一半(参见operator smallest_rectangle2)

'rect2_len2':
最小周围矩形宽度的一半(参见operator smallest_rectangle2)

'moments_m11':
区域的几何矩(参见operator moment_region_2nd)
'moments_m20':
区域的几何矩(参见operator moment_region_2nd)
'moments_m02':
区域的几何矩(参见operator moment_region_2nd)
'moments_ia':
区域的几何矩(参见operator moment_region_2nd)
'moments_ib':
区域的几何矩(参见operator moment_region_2nd)
'moments_m11_invar':
该区域的几何矩(参见operator moment_region_2nd_invar)
'moments_m20_invar':
该区域的几何矩(参见operator moment_region_2nd_invar)
'moments_m02_invar':
该区域的几何矩(参见operator moment_region_2nd_invar)
'moments_phi1':
该区域的几何矩(参见operator moment_region_2nd_rel_invar)
'moments_phi2':
该区域的几何矩(参见operator moment_region_2nd_rel_invar)
'moments_m21':
区域的几何时刻(参见操作员moment_region_3rd)
'moments_m12':
区域的几何时刻(参见操作员moment_region_3rd)
'moments_m03':
区域的几何时刻(参见操作员moment_region_3rd)
'moments_m30':
区域的几何时刻(参见操作员moment_region_3rd)
'moments_m21_invar':
该区域的几何矩(参见operator moment_region_3rd_invar)
'moments_m12_invar':
该区域的几何矩(参见operator moment_region_3rd_invar)
'moments_m03_invar':
该区域的几何矩(参见operator moment_region_3rd_invar)
'moments_m30_invar':
该区域的几何矩(参见operator moment_region_3rd_invar)
'moments_i1':
区域的几何矩(参见operator moment_region_central)
'moments_i2':
区域的几何矩(参见operator moment_region_central)
'moments_i3':
区域的几何矩(参见operator moment_region_central)
'moments_i4':
区域的几何矩(参见operator moment_region_central)
'moments_psi1':
该区域的几何矩(参见运算符moments_region_central_invar)
'moments_psi2':
该区域的几何矩(参见运算符moments_region_central_invar)
'moments_psi3':
该区域的几何矩(参见运算符moments_region_central_invar)
'moments_psi4':
该区域的几何矩(参见运算符moments_region_central_invar)
运营商名单
区域和区域的中心。
计算区域的孔面积。
形状因子用于区域的圆度(与圆的相似性)。
形状因子用于区域的紧凑性。
连接组件和孔的数量
区域的轮廓长度。
形状因子为区域的凸性。
区域的两个边界点之间的最大距离。
从椭圆参数派生的形状特征。
计算等效椭圆的参数。
计算欧拉数。
搜索直接邻居。
包含给定像素的所有区域的索引。
访问沿主轴的区域的厚度。
两个地区之间的汉明距离。
使用归一化在两个区域之间的汉明距离。
计算与坐标轴平行的周围矩形的宽度,高度和纵横比。
区域的最大内圈。
区域的最大内部矩形。
计算区域的几何矩。
区域的几何时刻。
区域的几何时刻。
区域的几何时刻。
区域的几何时刻。
区域的几何时刻。
区域的几何时刻。
一个地区的方向。
形状因子用于区域的矩形。
计算区域的形状特征。
形状因素来自轮廓。
区域的游程长度编码所需的运行分布。
区域的游程长度编码的特征值。
选择包含给定像素的所有区域。
构成地区的关系。
借助形状特征选择区域。
选择彼此具有一定关系的区域。
选择给定形状的区域。
一个地区最小的环绕圈。
与坐标轴平行的周围矩形。
最小的周围矩形,任何方向。
关于坐标轴构成区域关系。















 5925
5925











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









