







ROS的安装指南
ROS(Robot Operating System)为开源的机器人操作系统,Ubuntu14.04版本中的ROS的安装步骤如下:
1.配置Ubuntu知识库
安装ROS前要先进行Ubuntu知识库的配置,按照“Ubuntu软件中心-->编辑-->软件源”的顺序进入知识库设置界面,如图1所示:

图1
1)Ubuntu软件:
a.可从互联网下载:mian、universe、restricted和multiverse前面打勾,源代码前面不打勾。
b.下载服务器:下载服务器站点可以随便选,建议选择国内的,我选择的是http://mirrors.tuna.tsinghua.edu.cn,以后更改需要用户密码验证(如果后面输命令时系统提示命令找不到时,请回到这儿更改服务器站点,最好用我用的那个)。
c.可从光驱安装:根据自己安装Ubuntu软件的需要来勾选,我安装的ROS是从网上下载安装的,所以不选择“可从光驱安装”,”Ubuntu软件”这一栏配置如图2所示:

图2
2)其他软件:该页面显示的四个选项全部勾选,如图3所示:
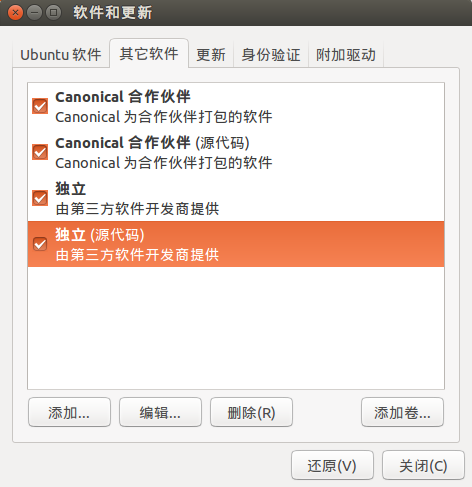
图3
3)更新:这一页面可以自主地选择,默认页面如图4所示:
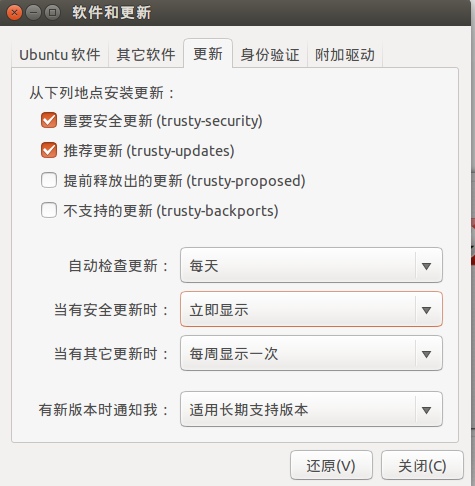
图4
4)身份验证:该页面设置暂且不管。
5)附加驱动:该页面设置也暂且不管。
完成Ubuntu知识库配置后,点击“关闭”保存退出。
注:如有不明白或者想了解详细资料请访问https://help.ubuntu.com/community/Repositories/Ubuntu。
2.安装ROS源列表:
同时按住Ctrl+Alt+T打开终端,在终端中输入如下命令:
sudo sh -c 'echo "debhttp://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
3.安装用户密钥:
接着输入如下命令从服务器下载密钥导入到本地(可从Ubuntu知识库中的身份验证页面查看):
sudo apt-key adv --keyserverhkp://ha.pool.sks-keyservers.net --recv-key 0xB01FA116
4.安装软件:
首先输入如下指令进行刷新:
sudo apt-get update
接下来安装ROS包,为了满足今后各种机器人仿真的需求,我们选择Desktop-Full版本,输入如下指令进行安装:
sudo apt-get install ros-indigo-desktop-full
运行到一半会提示:您希望继续执行吗?[Y/n],选择Y回车继续,等待安装。安装完成的界面如图5所示:
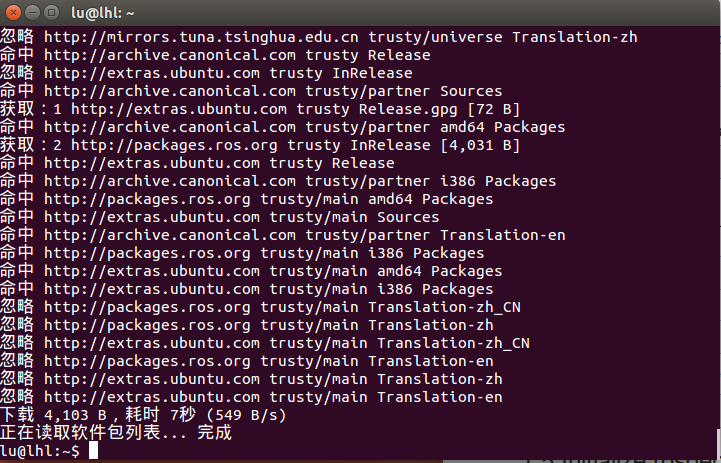
图5
5.初始化rosdep(ROS的依赖项)
输入如下指令进行依赖项的初始化,注意下面为三条指令,依次输入:
apt-cache searchros-indigo
sudo rosdep init
rosdep update
初始化完成后的界面如图6所示:
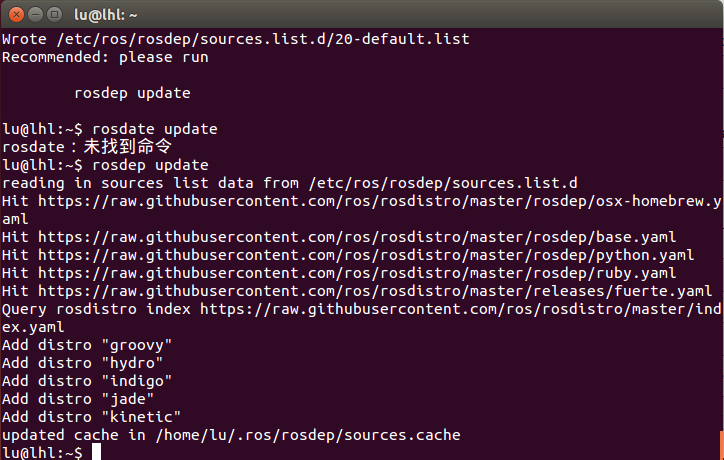
图6
6.环境安装
输入如下命令运行即可:
source /opt/ros/indigo/setup.bash
7.getting rosinstall
输入如下指令运行:
sudo apt-getinstall python-rosinstall
执行到一半,系统会给出提示:您希望继续执行吗?选择Y后回车继续,完成后的界面如图7所示:

图7
到这儿整个ROS环境的安装就已经完成了。
ROS安装的详细内容可以参考http://wiki.ros.org/indigo/Installation/Ubuntu。
为了验证自己安装好了ROS,在刚才的终端中输入roscore命令,然后再打开一个终端,依次输入如下指令:
export | grep ROS
source/opt/ros/indigo/setup.bash
rosrun turtlesimturtlesim_node
这时我们会看到一个蓝色的窗口,该窗口正中间有一只小乌龟,如图8所示,说明安装成功。
图8















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









