







渲染器已经断断续续做了三个月的时间了,加了一些基本的功能。
这周加入了path tracing算法和OpenMP多线程支持。
贴几张图
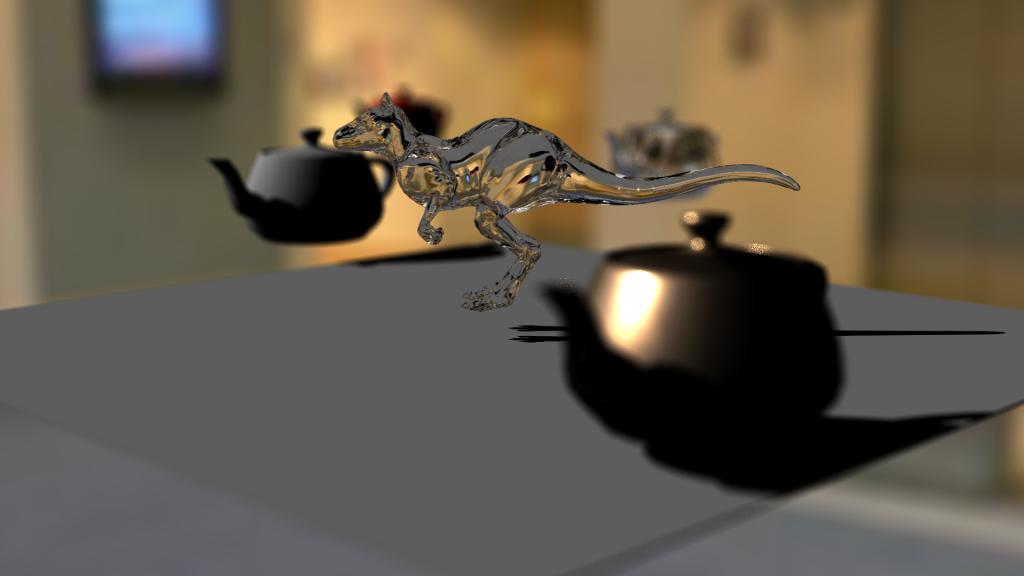

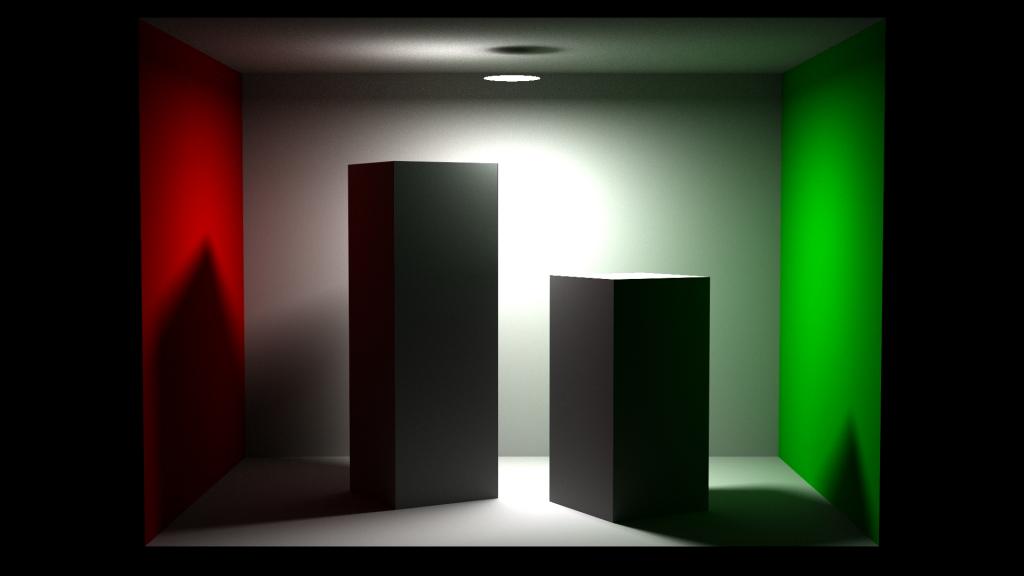
Path tracing收敛速度实在是慢啊....
还好OpenMP用起来比较简单,几行代码就可以把程序并行了。这个并行过程比CUDA方便多了,虽然没有CUDA并行粒度高,不过也算是利用多核计算了。
源代码:http://sourceforge.net/projects/soraytrace/
渲染器已经断断续续做了三个月的时间了,加了一些基本的功能。
这周加入了path tracing算法和OpenMP多线程支持。
贴几张图
Path tracing收敛速度实在是慢啊....
还好OpenMP用起来比较简单,几行代码就可以把程序并行了。这个并行过程比CUDA方便多了,虽然没有CUDA并行粒度高,不过也算是利用多核计算了。
源代码:http://sourceforge.net/projects/soraytrace/
 6127
6127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























