







1.针孔模型
一般而言,我们通过小孔成像来描述相机的成像原理,对其进行数学建模,如下图所示。
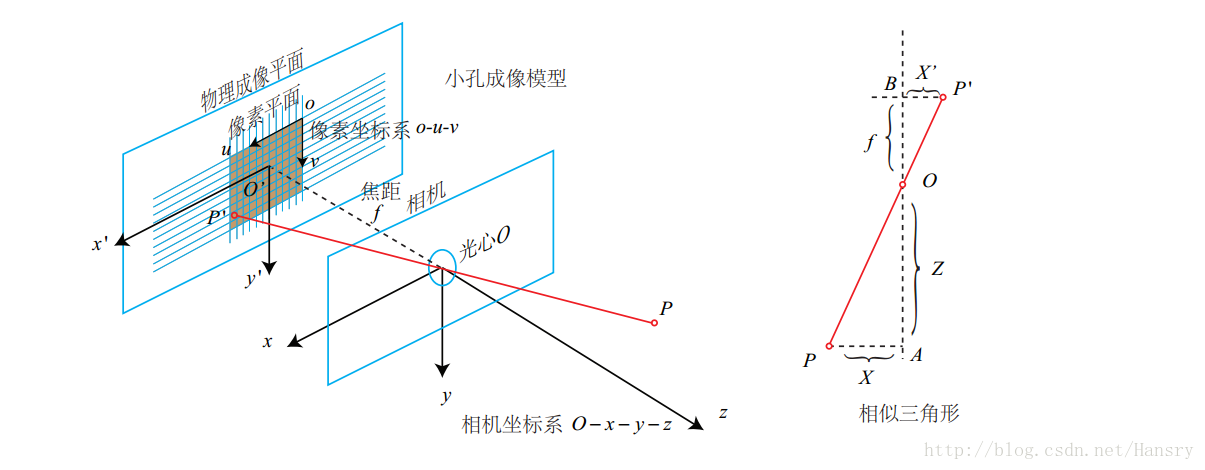
其中O-x-y-z为相机坐标系,O’-x’-y’-z’为成像平面物理坐标系,o-u-v为像素坐标系,通过此几何模型,我们可以得到:Z/f=-X/X’=-Y/Y’,其中负号表示这个在成像平面上所形成的像是倒的,我们可以对该模型进行一定的处理,将负号去掉,得到以下模型:
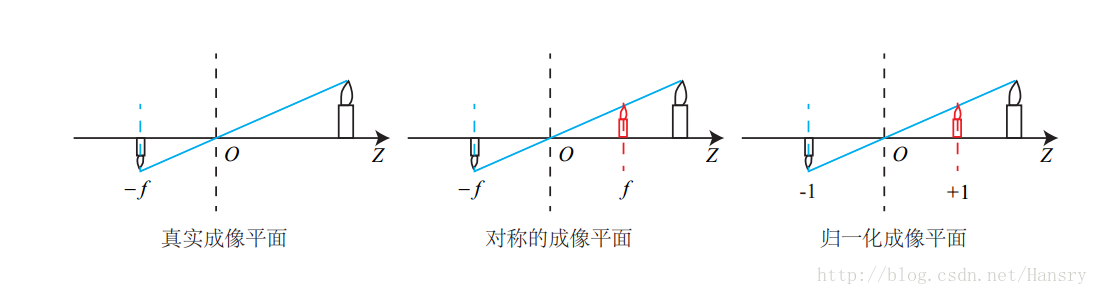
以上分别为真实成像平面、对称成像平面、归一化成像平面。其中像素坐标系的定义为:原点定义在左上角上,u轴与x轴平行,v轴与y轴平行。像素坐标系与成像坐标系相差了一个缩放和原点的平移。设在u轴缩放了 α α
倍,在 v 轴缩放了 β β 倍,原点平移了 [cx,cy]T [ c x , c y ] T ,则成像平面上的点P’与像素坐标的关系为:
{ u=αX′+cxv=βY′+cy { u = α X ′ + c x v = β Y ′ + c y
将像素平面与摄像机坐标系上的点 P(X,Y,Z) P ( X , Y , Z ) 联系起来,在这里,我们设 fx=αf f x = α f ( f f 表示焦距),
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









