







VREP下载地址:点击打开链接
VREP用户手册:点击打开链接
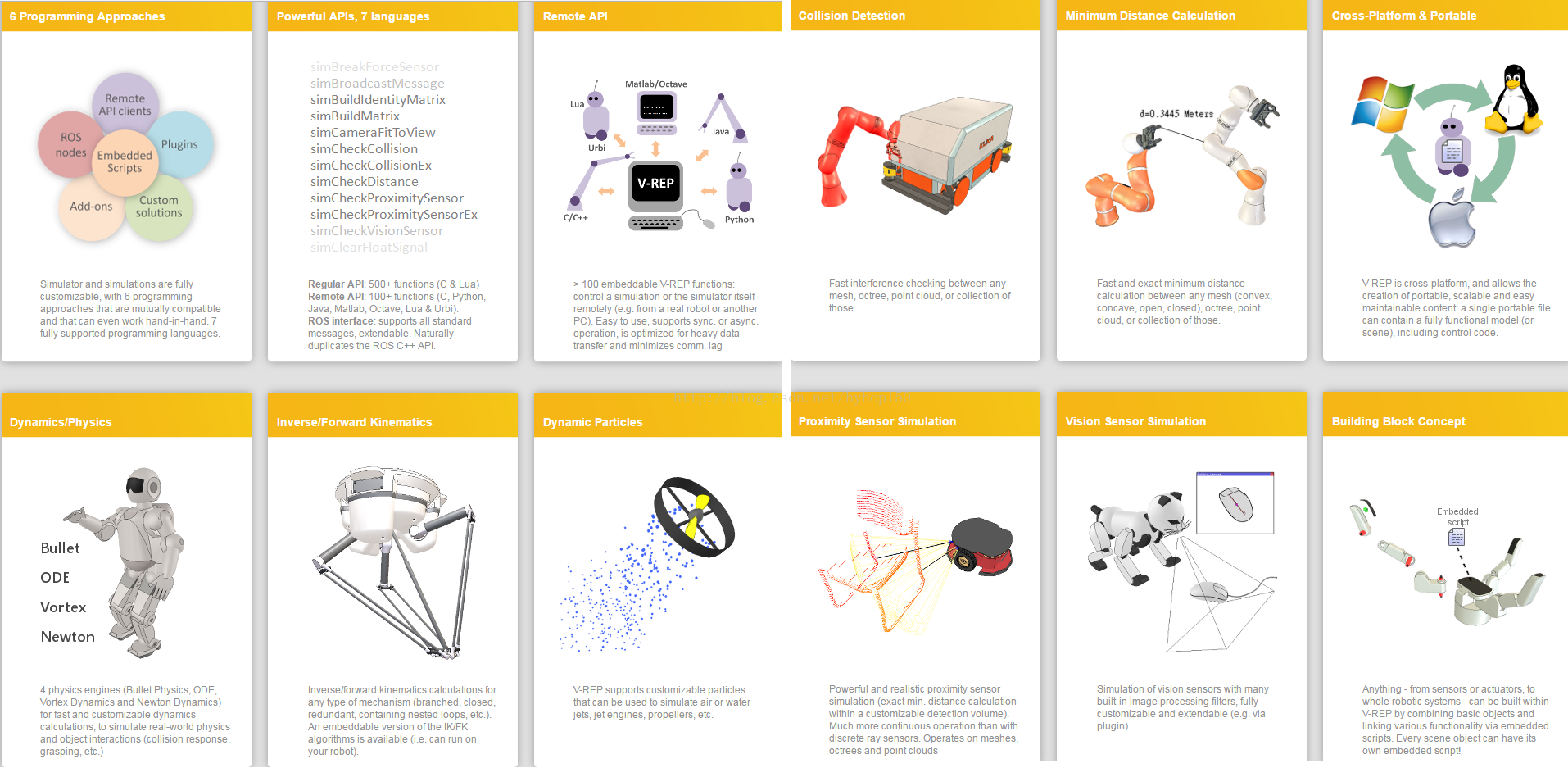
• 跨平台 (Windows、MacOS、Linux)
• 六种编程方法 (嵌入式脚本、插件、附加组件、ROS节点、远程客户端应用编程接口、或自定义的解决方案)
• 七种编程语言 (C/C++、Python、Java、Lua、Matlab、Octave、和 Urbi)
• 超过400种不同的应用编程接口函数
• 100项ROS服务、30个发布类型、25个ROS订户类型、可拓展
• 4个物理引擎 (ODE, Bullet, Vortex, Newton)
• Integrated ray-tracer (POV-Ray)
• 完整的运动学解算器 (对于任何机构的逆运动学和正运动学)
• Mesh, octree, point cloud-网孔干扰检测
• Mesh, octree, point cloud-网孔最短距离计算
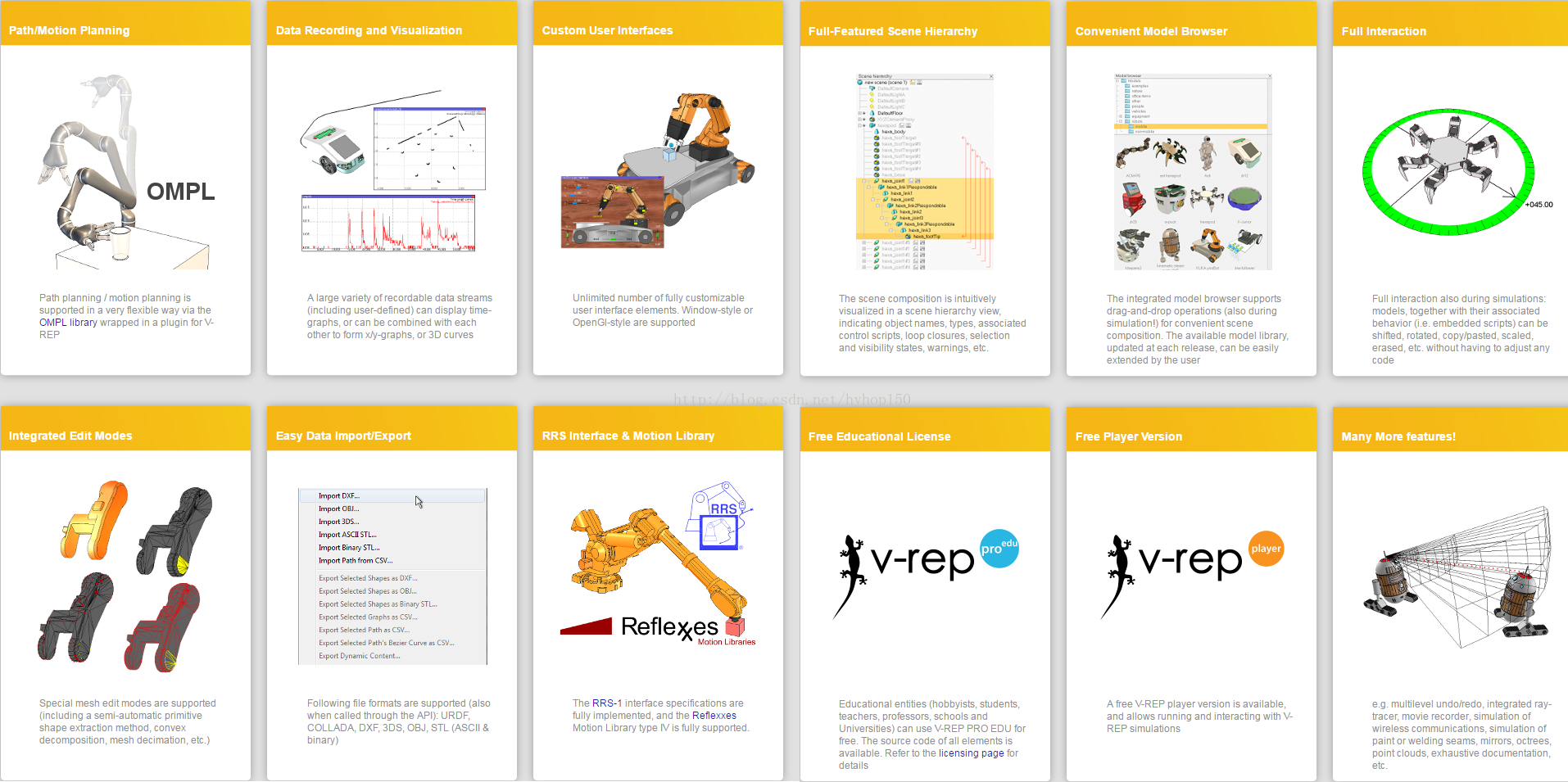
• 路径规划 (在2到6维中的完整约束、对于车式车辆的非完整约束)
• 嵌入图像处理的视觉传感器 (完全可拓展)
• 现实的接近传感器 (在检测区域中的最短距离计算)
• 嵌入式的定制用户接口、包括编辑器
• 完全集成的第四类Reflexxes运动库 + RRS-1 interface specifications
• 表面切削仿真
• 数据记录与可视化 (时距图、X/Y图或三维曲线)
• 整合图形编辑模式
• 支持水/气体喷射的动态颗粒仿真
• 带有拖放功能的模型浏览器 (在仿真中依旧可行)
• 多层 取消/重做、影像记录、油漆的仿真、详尽的文档等
机器人、机器人学、仿真器、仿真、运动学、动力学、路径规划、最短距离计算、碰撞检测、视觉传感器、图像处理、接近传感器、油漆分散仿真.
并且包含众多公司提供的机器人模型用于实验。
对于我个人而言,我之前使用的是ROS,ROS集合了全世界开发者实现的大量开源功能包,再加上官方的功能包共同构成一个强大的开源系统;同时,ROS的结构设计中,ROS的运行由多个松耦合的节点组成,这些节点即可集成在同一处理器上运行,也可以分布在多个处理器上运行,这种设计有利于嵌入式系统的设计。和众多开源产品一样ROS具有优良的开源基因,松耦合设计方法,可扩展的软件结构,功能复用思想,极大降低了机器人领域的进入门槛,便于初学者跨入机器人领域,也便于开发人员把跟多时间用于对于核心算法的改进上。但是在我之前的博文中可以发现建立一个ROS的仿真模型是比较麻烦的一件事情。
因此我个人认为ROS比较适用于用现有模型对核心算法的研究与改进甚至研发,但不利于机器人结构的设计以及自主研发的机器人的具体动作研究,当需要定义自主研发的机器人的行动,步态以及结构属性的研究时,ROS就不太适用了。
在自主研发的机器人上V-REP由很大的优势,界面化的操作,内嵌的多种模型,简单的关联操作,便利的模型设计,简易的动作控制脚本文件这都体现了V-REP在机器人结构属性的研究上的优势,这也是我弃ROS转而使用V-REP的原因。在接下来的系列博文中我会简单的介绍一个避障小车的构建(与用户手册中的BubbleRob tutorial一致)
参考博文:
http://blog.csdn.net/liang890319/article/details/52640298
http://blog.csdn.net/mountzf/article/details/51594691














 2310
2310











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









