






课程二 刚体的运动分析(Motion Analysis of Rigid Body)
1.什么是刚体:刚性物体上的任意点对点之间的距离不随时间变化。
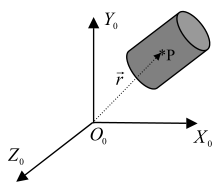
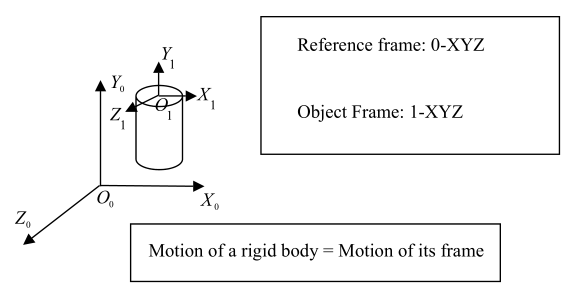
2.刚体的位置表示:
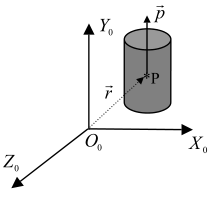
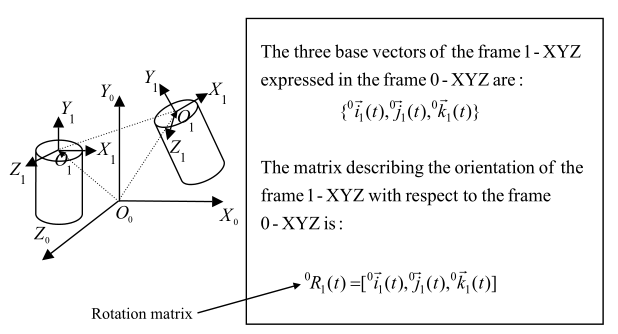
3.刚体的定向:
4.刚体对象的帧分配:
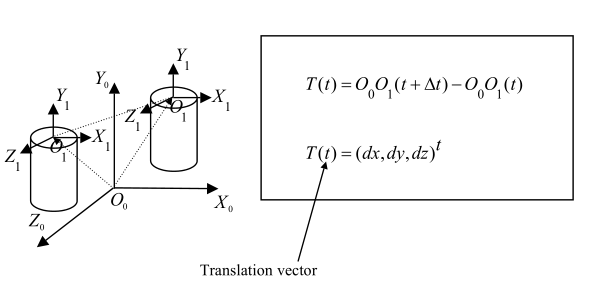
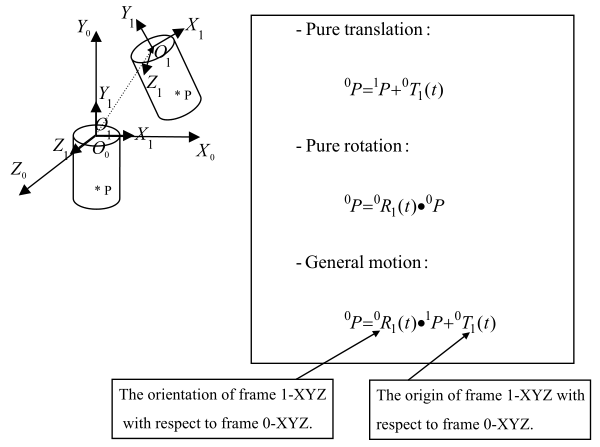
5.刚体的平移:
6.刚体转动:
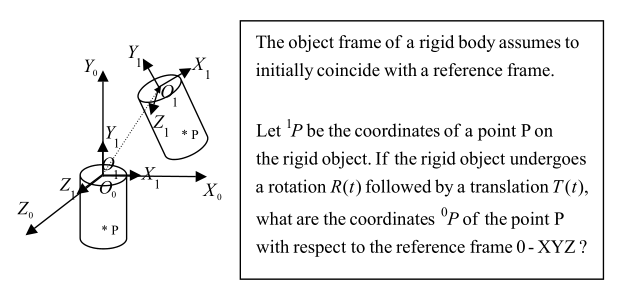
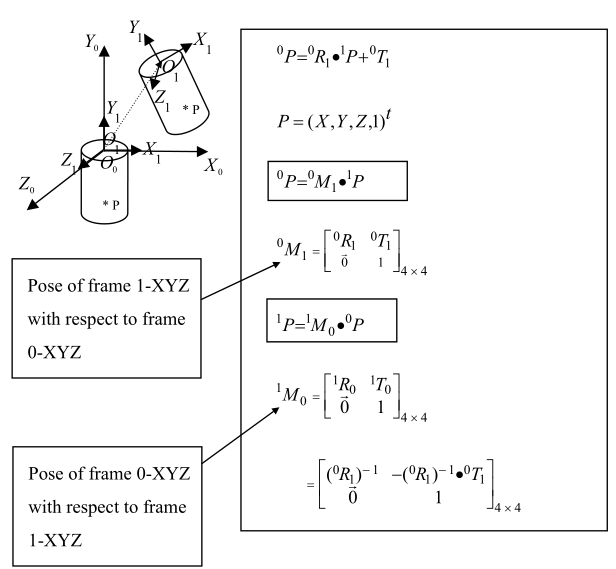
7.“坐标转换”问题的陈述:
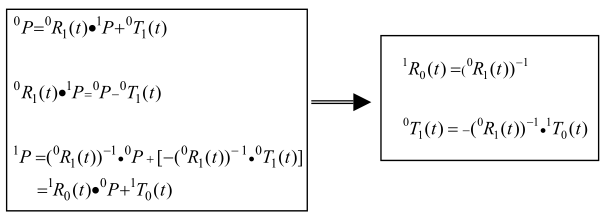
8.坐标转换:
9.做表逆向转换:
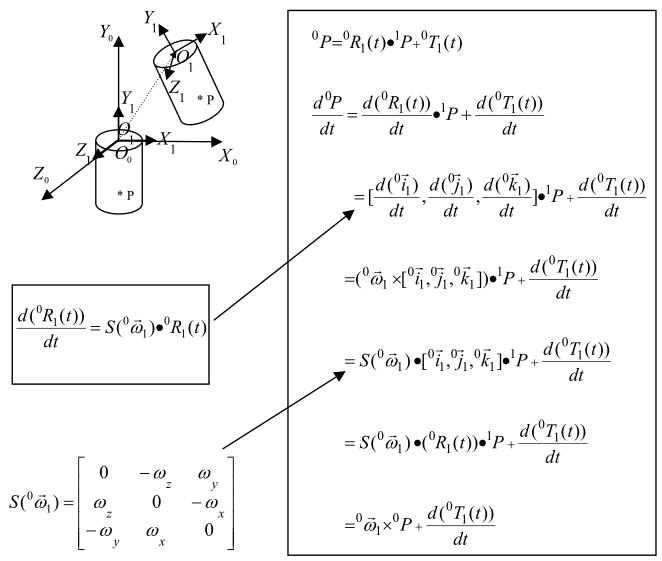
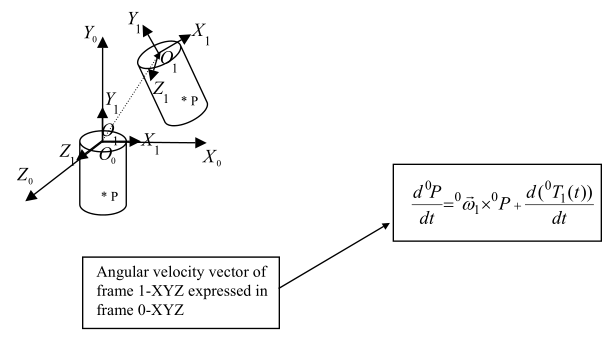
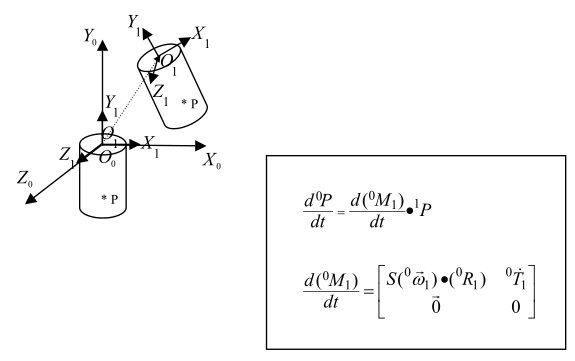
10.刚体速度:
11.齐次变换:
12.齐次变换的微分:
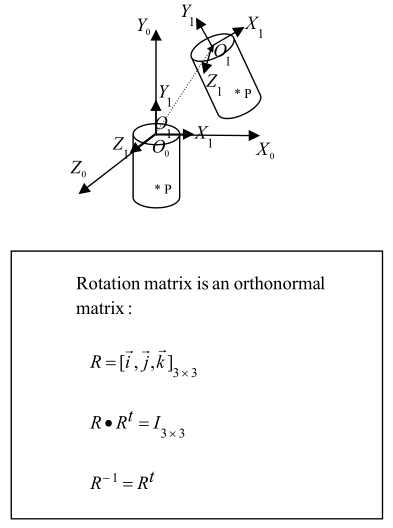
13.旋转的特性:
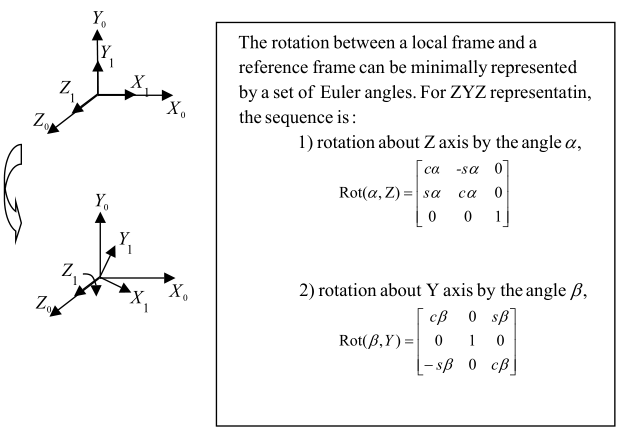
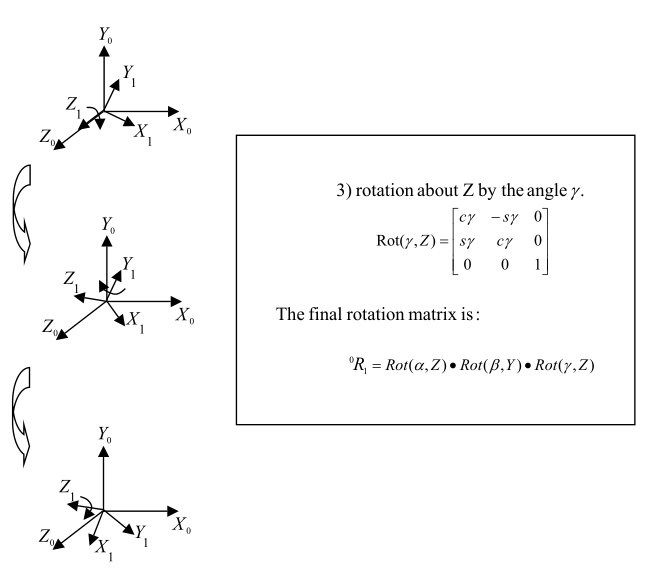
13.欧拉角:
总结
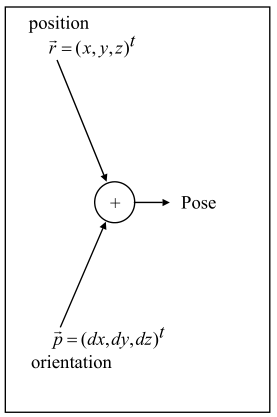
1.要指定运动,首先要做的是定义一个引用系统,包括:
a)原点
b)由单位基向量构成的帧
2.对于一个粒子,它的运动可以描述它的位置,速度和加速度。它可以跟随
线性和/或循环的路径/轨迹。
3.对于一个刚体,它的运动可以被描述为:
a)位置
b)方向
c)速度
d)加速度
4.坐标变换可以简洁地表述为一个齐次变换。















 4116
4116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









