







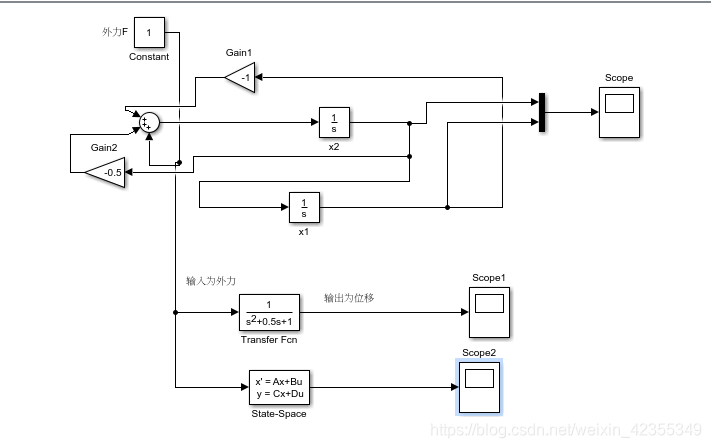
1 状态空间方程与传递函数关系
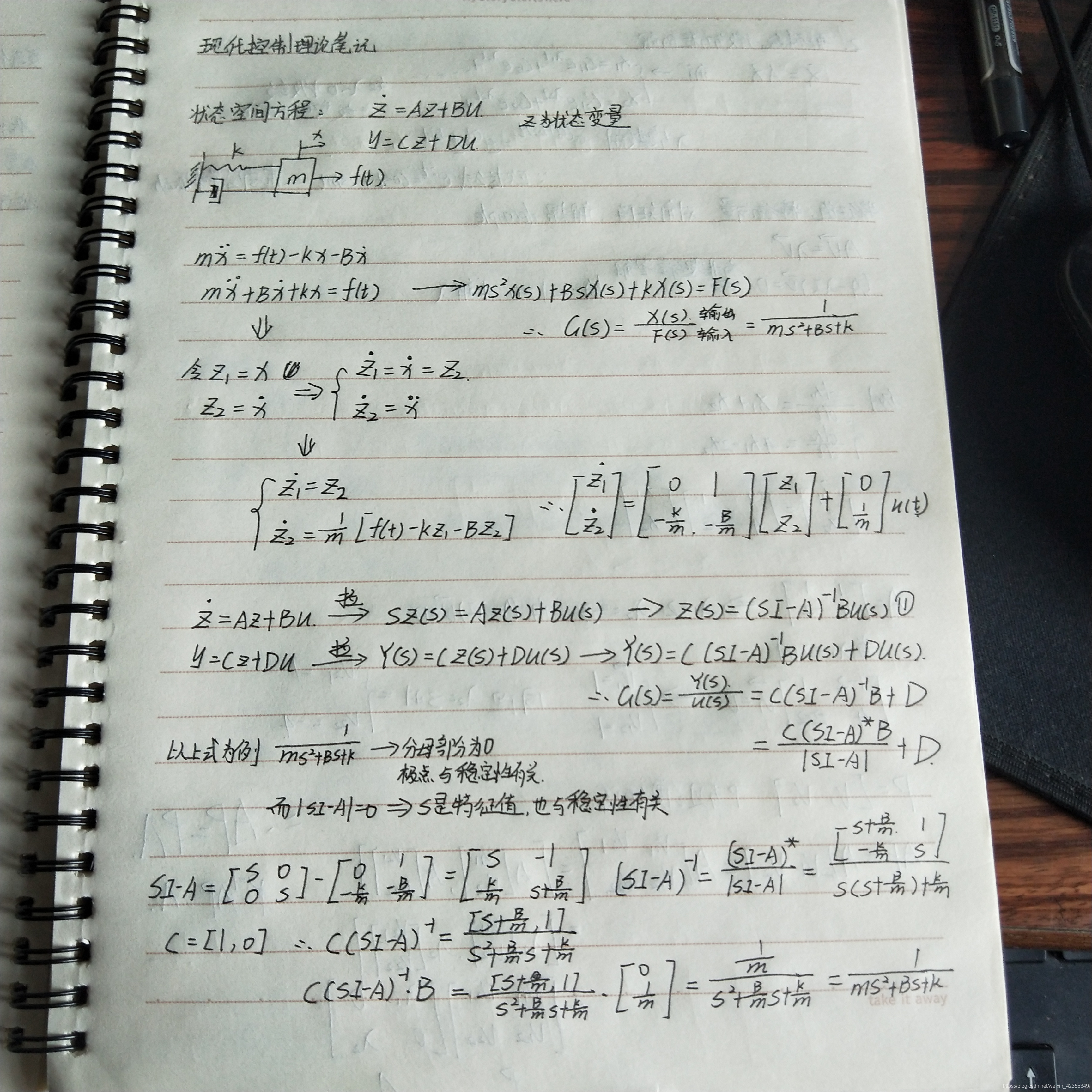
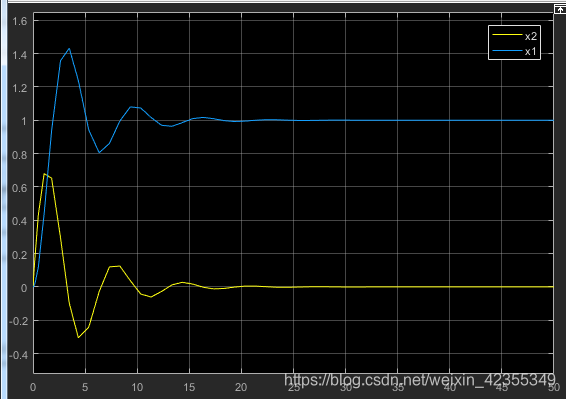
令 m =1, B = 0.5, k =1, 外力恒为1N,最后滑块会平衡在处
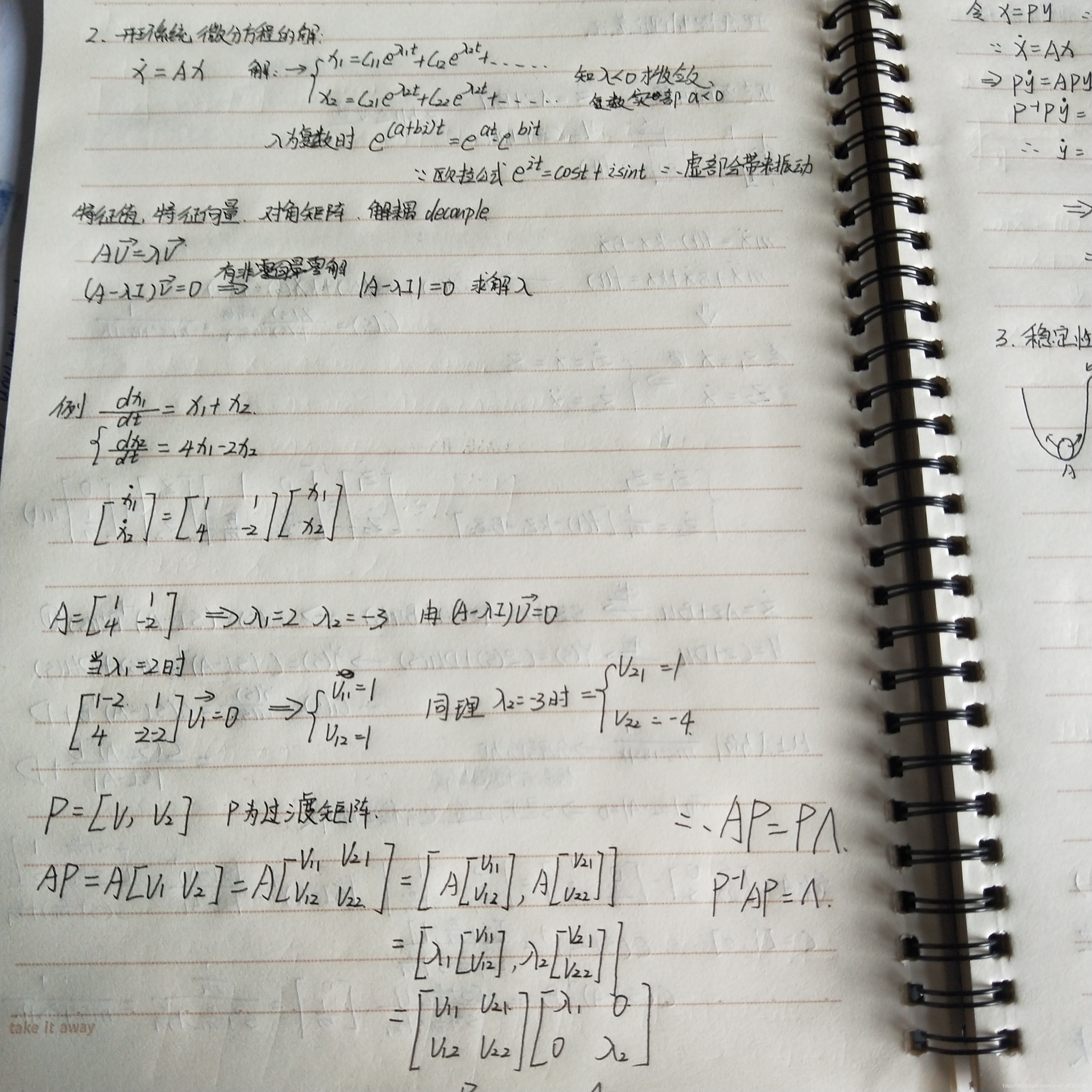
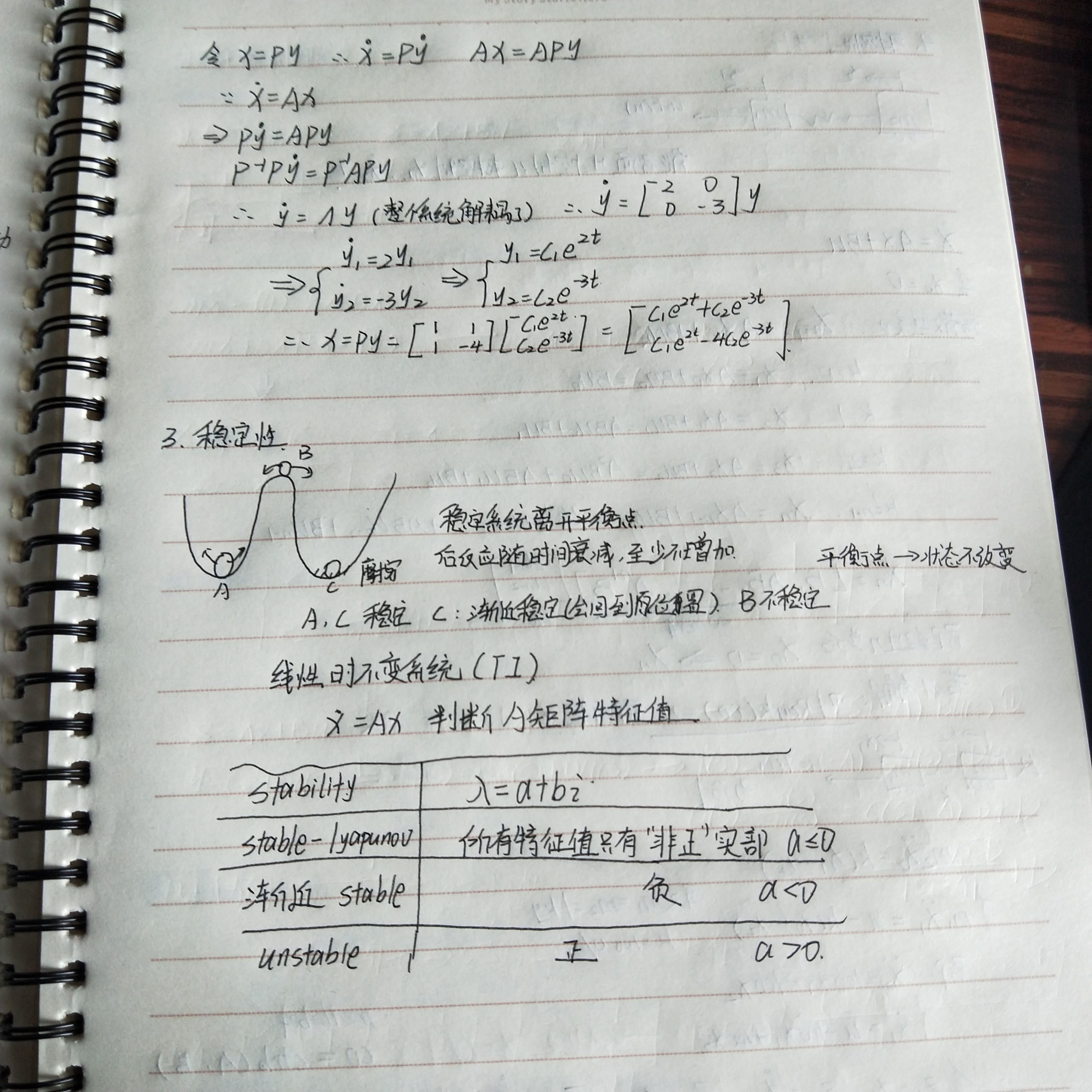
2 微分方程的解 特征值 特征向量 对角矩阵 解耦
3 稳定性
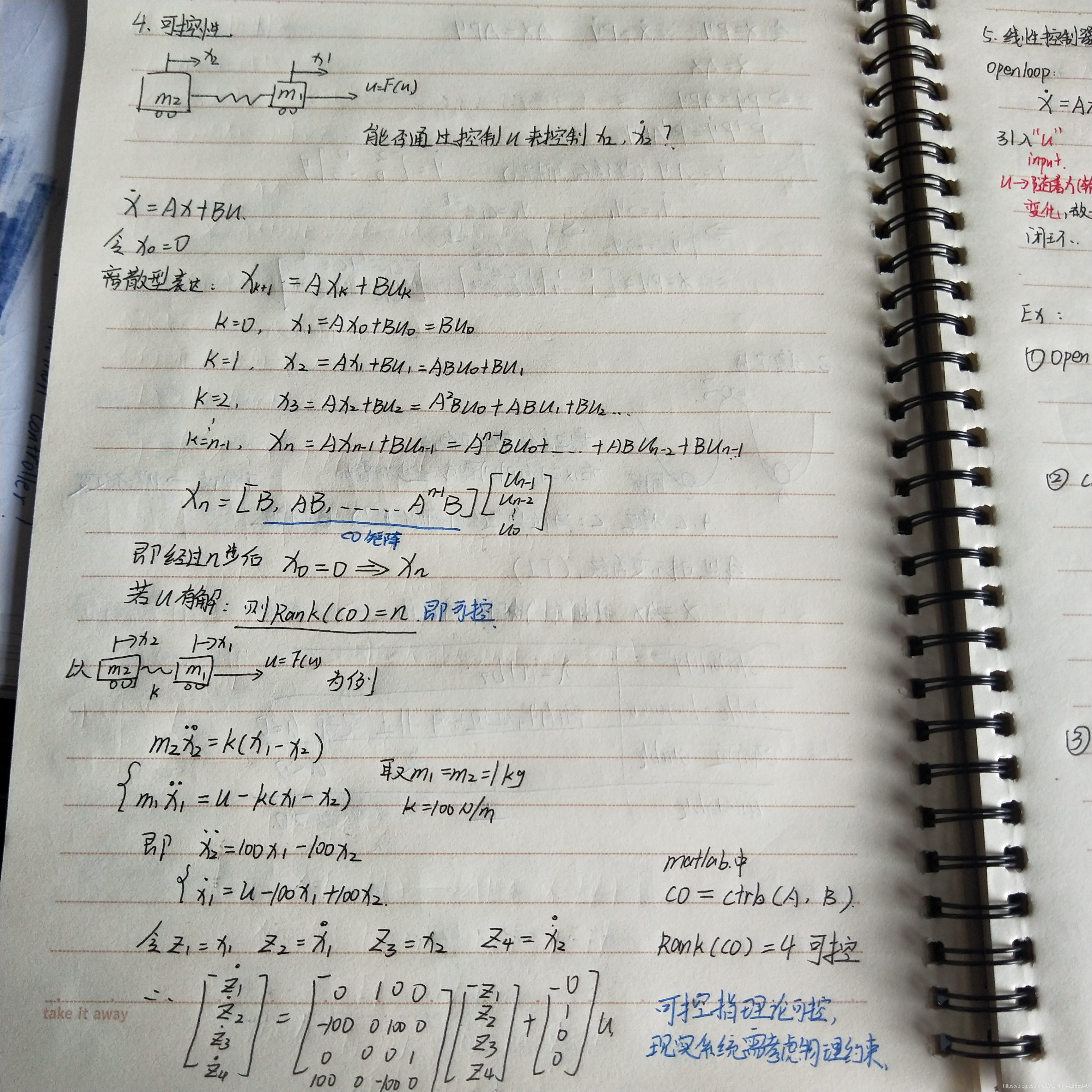
4 可控性
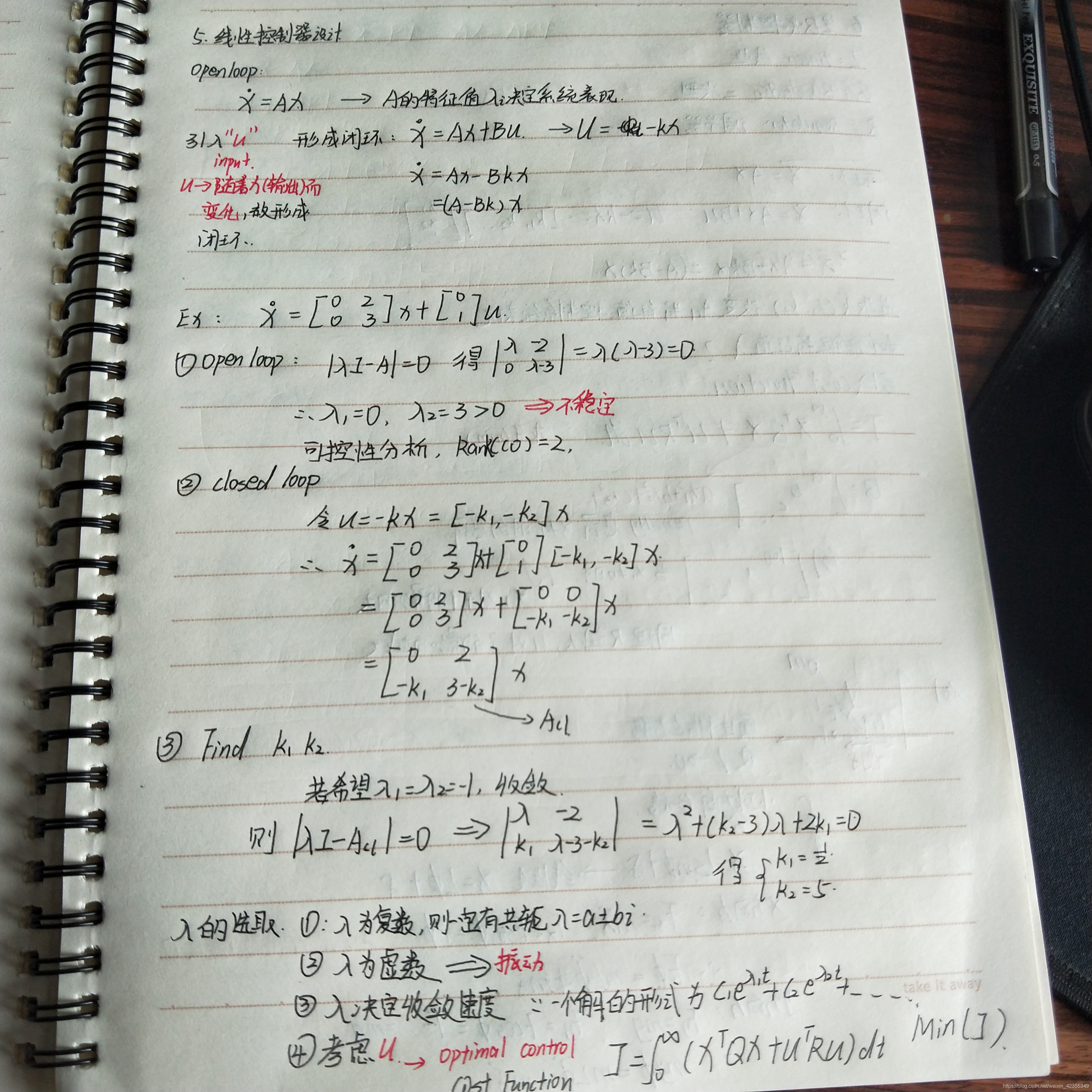
5 线性控制器设计
6 LQR控制器
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















03-01
 910
910
910
12-18
2700
2700
03-04
1755
1755

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









