










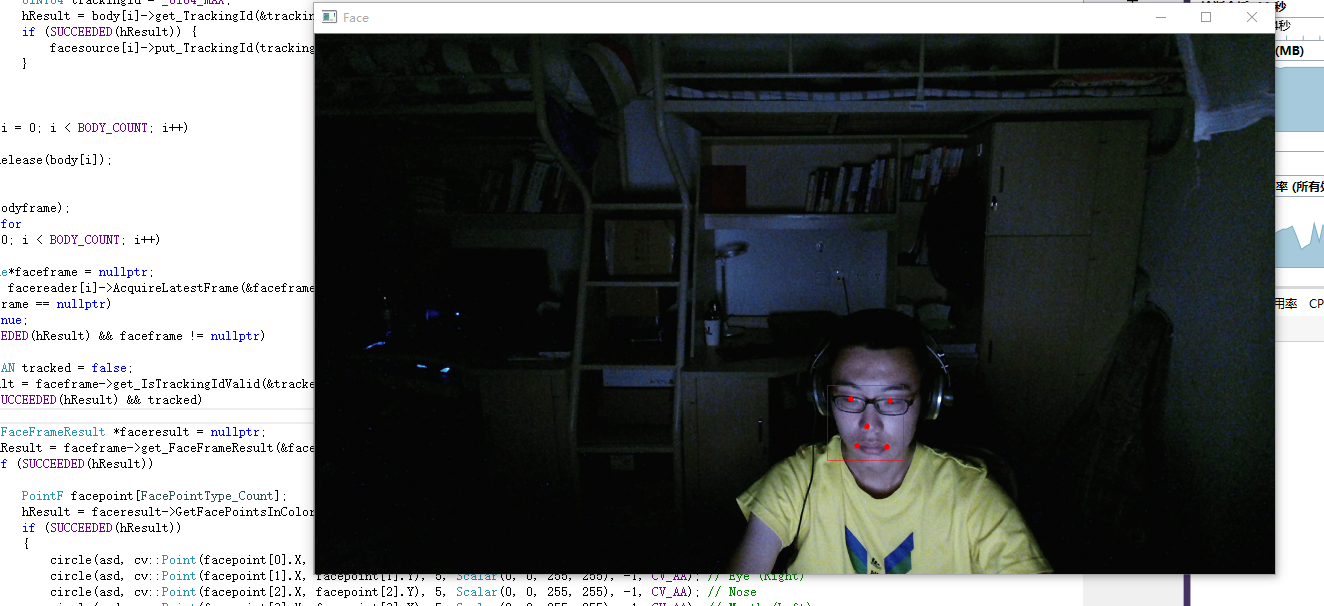
下面的代码中是只获取了那5个点的位置并绘制出来。
注意,要从这个地址C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Redist\Face把对应文件夹复制过来。由于我的电脑cpu不够,不能直接达到30帧,所以我用了OpenMP来并行计算,可以到达30帧。
这篇后面会有获取其他信息的代码
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <Kinect.h>
#include<Kinect.Face.h>
#pragma comment ( lib, "kinect20.lib" )
#pragma comment ( lib, "Kinect20.face.lib" )
using namespace cv;
using namespace std;
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{
if (pInterfaceToRelease != NULL)
{
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
int main()
{
IKinectSensor*kinect;
GetDefaultKinectSensor(&kinect);
kinect->Open();
HRESULT hResult;
IColorFrameSource*colorsource;
kinect->get_ColorFrameSource(&colorsource);
IColorFrameReader*colorreader;
colorsource->OpenReader(&colorreader);
IBodyFrameSource*bodysource;
kinect->get_BodyFrameSource(&bodysource);
IBodyFrameReader*bodyreader;
bodysource->OpenReader(&bodyreader);
ICoordinateMapper* coordinatemapper;
kinect->get_CoordinateMapper(&coordinatemapper);
IFaceFrameSource* facesource[BODY_COUNT];
DWORD features = FaceFrameFeatures::FaceFrameFeatures_BoundingBoxInColorSpace
| FaceFrameFeatures::FaceFrameFeatures_PointsInColorSpace
| FaceFrameFeatures::FaceFrameFeatures_RotationOrientation
| FaceFrameFeatures::FaceFrameFeatures_Happy
| FaceFrameFeatures::FaceFrameFeatures_RightEyeClosed
| FaceFrameFeatures::FaceFrameFeatures_LeftEyeClosed
| FaceFrameFeatures::FaceFrameFeatures_MouthOpen
| FaceFrameFeatures::FaceFrameFeatures_MouthMoved
| FaceFrameFeatures::FaceFrameFeatures_LookingAway
| FaceFrameFeatures::FaceFrameFeatures_Glasses
| FaceFrameFeatures::FaceFrameFeatures_FaceEngagement;
IFaceFrameReader* facereader[BODY_COUNT];
for (int i = 0; i < BODY_COUNT; i++)
{
hResult= CreateFaceFrameSource(kinect, 0, features, &facesource[i]);
if (FAILED(hResult))
{
std::cerr << "Error : CreateFaceFrameSource" << std::endl;
return -1;
}
facesource[i]->OpenReader(&facereader[i]);
}
while (1)
{
Mat asd(1080, 1920, CV_8UC4);
IColorFrame* colorframe = nullptr;
hResult = colorreader->AcquireLatestFrame(&colorframe);
if (colorframe == nullptr)
continue;
if (SUCCEEDED(hResult)) {
colorframe->CopyConvertedFrameDataToArray(1920*1080*4, reinterpret_cast<BYTE*>(asd.data), ColorImageFormat::ColorImageFormat_Bgra);
}
SafeRelease(colorframe);
IBodyFrame* bodyframe = nullptr;
hResult = bodyreader->AcquireLatestFrame(&bodyframe);
if (SUCCEEDED(hResult))
{
IBody* body[BODY_COUNT] = { 0 };
hResult = bodyframe->GetAndRefreshBodyData(BODY_COUNT, body);
if (SUCCEEDED(hResult))
{
#pragma omp parallel for
for (int i = 0; i < BODY_COUNT; i++)
{
BOOLEAN tracked = false;
hResult = body[i]->get_IsTracked(&tracked);
if (SUCCEEDED(hResult) && tracked)
{
UINT64 trackingId = _UI64_MAX;
hResult = body[i]->get_TrackingId(&trackingId);
if (SUCCEEDED(hResult)) {
facesource[i]->put_TrackingId(trackingId);
}
}
}
}
for (int i = 0; i < BODY_COUNT; i++)
{
SafeRelease(body[i]);
}
}
SafeRelease(bodyframe);
#pragma omp parallel for
for (int i = 0; i < BODY_COUNT; i++)
{
IFaceFrame*faceframe = nullptr;
hResult = facereader[i]->AcquireLatestFrame(&faceframe);
if (faceframe == nullptr)
continue;
if (SUCCEEDED(hResult) && faceframe != nullptr)
{
BOOLEAN tracked = false;
hResult = faceframe->get_IsTrackingIdValid(&tracked);
if (SUCCEEDED(hResult) && tracked)
{
IFaceFrameResult *faceresult = nullptr;
hResult = faceframe->get_FaceFrameResult(&faceresult);
if (SUCCEEDED(hResult))
{
PointF facepoint[FacePointType_Count];
hResult = faceresult->GetFacePointsInColorSpace(FacePointType_Count, facepoint);
if (SUCCEEDED(hResult))
{
circle(asd, cv::Point(facepoint[0].X, facepoint[0].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Eye (Left)
circle(asd, cv::Point(facepoint[1].X, facepoint[1].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Eye (Right)
circle(asd, cv::Point(facepoint[2].X, facepoint[2].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Nose
circle(asd, cv::Point(facepoint[3].X, facepoint[3].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Mouth (Left)
circle(asd, cv::Point(facepoint[4].X, facepoint[4].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Mouth (Right)
}
RectI box;
hResult = faceresult->get_FaceBoundingBoxInColorSpace(&box);
if (SUCCEEDED(hResult))
{
cv::rectangle(asd, cv::Rect(box.Left, box.Top, box.Right - box.Left, box.Bottom - box.Top), Scalar(0, 0, 255, 255));
}
}
SafeRelease(faceresult);
}
}
SafeRelease(faceframe);
}
Mat faceimg;
cv::resize(asd, faceimg, cv::Size(), 0.5, 0.5);
cv::imshow("Face", faceimg);
if (cv::waitKey(34) == VK_ESCAPE)
{
break;
}
}
SafeRelease(colorsource);
SafeRelease(bodysource);
SafeRelease(colorreader);
SafeRelease(bodyreader);
SafeRelease(coordinatemapper);
for (int i = 0; i < BODY_COUNT; i++) {
SafeRelease(facesource[i]);
SafeRelease(facereader[i]);
}
if (kinect) {
kinect->Close();
}
SafeRelease(kinect);
cv::destroyAllWindows();
}运行图:
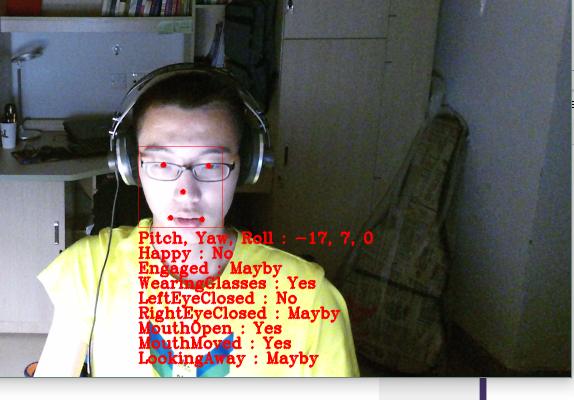
获取全部信息的代码:
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <Kinect.h>
#include<Kinect.Face.h>
#pragma comment ( lib, "kinect20.lib" )
#pragma comment ( lib, "Kinect20.face.lib" )
using namespace cv;
using namespace std;
template<class Interface>
inline void SafeRelease(Interface *& pInterfaceToRelease)
{
if (pInterfaceToRelease != NULL)
{
pInterfaceToRelease->Release();
pInterfaceToRelease = NULL;
}
}
inline void ExtractFaceRotationInDegrees(const Vector4* pQuaternion, int* pPitch, int* pYaw, int* pRoll)
{
double x = pQuaternion->x;
double y = pQuaternion->y;
double z = pQuaternion->z;
double w = pQuaternion->w;
*pPitch = static_cast<int>(std::atan2(2 * (y * z + w * x), w * w - x * x - y * y + z * z) / 3.14159265358979 * 180.0f);
*pYaw = static_cast<int>(std::asin(2 * (w * y - x * z)) / 3.14159265358979 * 180.0f);
*pRoll = static_cast<int>(std::atan2(2 * (x * y + w * z), w * w + x * x - y * y - z * z) / 3.14159265358979 * 180.0f);
}
int main()
{
IKinectSensor*kinect;
GetDefaultKinectSensor(&kinect);
kinect->Open();
HRESULT hResult;
IColorFrameSource*colorsource;
kinect->get_ColorFrameSource(&colorsource);
IColorFrameReader*colorreader;
colorsource->OpenReader(&colorreader);
IBodyFrameSource*bodysource;
kinect->get_BodyFrameSource(&bodysource);
IBodyFrameReader*bodyreader;
bodysource->OpenReader(&bodyreader);
ICoordinateMapper* coordinatemapper;
kinect->get_CoordinateMapper(&coordinatemapper);
IFaceFrameSource* facesource[BODY_COUNT];
DWORD features = FaceFrameFeatures::FaceFrameFeatures_BoundingBoxInColorSpace
| FaceFrameFeatures::FaceFrameFeatures_PointsInColorSpace
| FaceFrameFeatures::FaceFrameFeatures_RotationOrientation
| FaceFrameFeatures::FaceFrameFeatures_Happy
| FaceFrameFeatures::FaceFrameFeatures_RightEyeClosed
| FaceFrameFeatures::FaceFrameFeatures_LeftEyeClosed
| FaceFrameFeatures::FaceFrameFeatures_MouthOpen
| FaceFrameFeatures::FaceFrameFeatures_MouthMoved
| FaceFrameFeatures::FaceFrameFeatures_LookingAway
| FaceFrameFeatures::FaceFrameFeatures_Glasses
| FaceFrameFeatures::FaceFrameFeatures_FaceEngagement;
IFaceFrameReader* facereader[BODY_COUNT];
for (int i = 0; i < BODY_COUNT; i++)
{
hResult= CreateFaceFrameSource(kinect, 0, features, &facesource[i]);
if (FAILED(hResult))
{
std::cerr << "Error : CreateFaceFrameSource" << std::endl;
return -1;
}
facesource[i]->OpenReader(&facereader[i]);
}
string property[FaceProperty_Count];
property[0] = "Happy";
property[1] = "Engaged";
property[2] = "WearingGlasses";
property[3] = "LeftEyeClosed";
property[4] = "RightEyeClosed";
property[5] = "MouthOpen";
property[6] = "MouthMoved";
property[7] = "LookingAway";
while (1)
{
Mat asd(1080, 1920, CV_8UC4);
IColorFrame* colorframe = nullptr;
hResult = colorreader->AcquireLatestFrame(&colorframe);
if (colorframe == nullptr)
continue;
if (SUCCEEDED(hResult)) {
colorframe->CopyConvertedFrameDataToArray(1920*1080*4, reinterpret_cast<BYTE*>(asd.data), ColorImageFormat::ColorImageFormat_Bgra);
}
SafeRelease(colorframe);
IBodyFrame* bodyframe = nullptr;
hResult = bodyreader->AcquireLatestFrame(&bodyframe);
if (SUCCEEDED(hResult))
{
IBody* body[BODY_COUNT] = { 0 };
hResult = bodyframe->GetAndRefreshBodyData(BODY_COUNT, body);
if (SUCCEEDED(hResult))
{
#pragma omp parallel for
for (int i = 0; i < BODY_COUNT; i++)
{
BOOLEAN tracked = false;
hResult = body[i]->get_IsTracked(&tracked);
if (SUCCEEDED(hResult) && tracked)
{
UINT64 trackingId = _UI64_MAX;
hResult = body[i]->get_TrackingId(&trackingId);
if (SUCCEEDED(hResult)) {
facesource[i]->put_TrackingId(trackingId);
}
}
}
}
for (int i = 0; i < BODY_COUNT; i++)
{
SafeRelease(body[i]);
}
}
SafeRelease(bodyframe);
#pragma omp parallel for
for (int i = 0; i < BODY_COUNT; i++)
{
IFaceFrame*faceframe = nullptr;
hResult = facereader[i]->AcquireLatestFrame(&faceframe);
if (faceframe == nullptr)
continue;
if (SUCCEEDED(hResult) && faceframe != nullptr)
{
BOOLEAN tracked = false;
hResult = faceframe->get_IsTrackingIdValid(&tracked);
if (SUCCEEDED(hResult) && tracked)
{
IFaceFrameResult *faceresult = nullptr;
hResult = faceframe->get_FaceFrameResult(&faceresult);
if (SUCCEEDED(hResult))
{
PointF facepoint[FacePointType_Count];
hResult = faceresult->GetFacePointsInColorSpace(FacePointType_Count, facepoint);
if (SUCCEEDED(hResult))
{
circle(asd, cv::Point(facepoint[0].X, facepoint[0].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Eye (Left)
circle(asd, cv::Point(facepoint[1].X, facepoint[1].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Eye (Right)
circle(asd, cv::Point(facepoint[2].X, facepoint[2].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Nose
circle(asd, cv::Point(facepoint[3].X, facepoint[3].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Mouth (Left)
circle(asd, cv::Point(facepoint[4].X, facepoint[4].Y), 5, Scalar(0, 0, 255, 255), -1, CV_AA); // Mouth (Right)
}
RectI box;
hResult = faceresult->get_FaceBoundingBoxInColorSpace(&box);
if (SUCCEEDED(hResult))
{
cv::rectangle(asd, cv::Rect(box.Left, box.Top, box.Right - box.Left, box.Bottom - box.Top), Scalar(0, 0, 255, 255));
}
vector<string> result;
Vector4 faceRotation;
hResult = faceresult->get_FaceRotationQuaternion(&faceRotation);
if (SUCCEEDED(hResult))
{
int pitch, yaw, roll;
ExtractFaceRotationInDegrees(&faceRotation, &pitch, &yaw, &roll);
result.push_back("Pitch, Yaw, Roll : " + std::to_string(pitch) + ", " + std::to_string(yaw) + ", " + std::to_string(roll));
}
DetectionResult faceProperty[FaceProperty::FaceProperty_Count];
hResult = faceresult->GetFaceProperties(FaceProperty::FaceProperty_Count, faceProperty);
if (SUCCEEDED(hResult))
{
for (int count = 0; count < FaceProperty::FaceProperty_Count; count++)
{
switch (faceProperty[count])
{
case DetectionResult::DetectionResult_Unknown:
result.push_back(property[count] + " : Unknown");
break;
case DetectionResult::DetectionResult_Yes:
result.push_back(property[count] + " : Yes");
break;
case DetectionResult::DetectionResult_No:
result.push_back(property[count] + " : No");
break;
case DetectionResult::DetectionResult_Maybe:
result.push_back(property[count] + " : Mayby");
break;
default:
break;
}
}
}
if (box.Left && box.Bottom)
{
int offset = 30;
for (int i = 0; i < 8;i++,offset+=30)
{
putText(asd, result[i], cv::Point(box.Left, box.Bottom + offset), FONT_HERSHEY_COMPLEX, 1.0f, Scalar(0, 0, 255, 255), 2, CV_AA);
}
}
}
SafeRelease(faceresult);
}
}
SafeRelease(faceframe);
}
Mat faceimg;
cv::resize(asd, faceimg, cv::Size(), 0.5, 0.5);
cv::imshow("Face", faceimg);
if (cv::waitKey(34) == VK_ESCAPE)
{
break;
}
}
SafeRelease(colorsource);
SafeRelease(bodysource);
SafeRelease(colorreader);
SafeRelease(bodyreader);
SafeRelease(coordinatemapper);
for (int i = 0; i < BODY_COUNT; i++) {
SafeRelease(facesource[i]);
SafeRelease(facereader[i]);
}
if (kinect) {
kinect->Close();
}
SafeRelease(kinect);
cv::destroyAllWindows();
}
















 2785
2785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











