







 本文详细介绍了贝叶斯滤波器在SLAM中的应用,包括状态估计公式、递归贝叶斯滤波的预测与校正步骤。探讨了运动模型,如Odometry Model和Velocity-based Model,并触及传感器模型的概念。
本文详细介绍了贝叶斯滤波器在SLAM中的应用,包括状态估计公式、递归贝叶斯滤波的预测与校正步骤。探讨了运动模型,如Odometry Model和Velocity-based Model,并触及传感器模型的概念。
贝叶斯滤波器
定义状态估计p(x | z, u) ,即又此时的observations和之前的控制命令,估计现在的状态。
- 递归贝叶斯滤波器
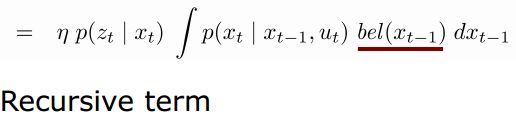
首先定义:bel(…)代表贝叶斯模型
由此得到了上一时刻位置的贝叶斯模型。
贝叶斯滤波器分为两步:
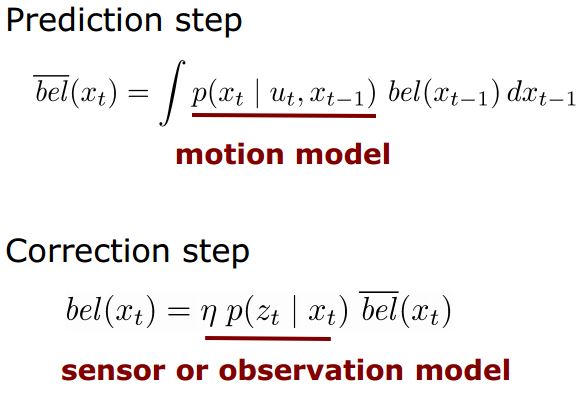
第一步很好理解,预测过程,即如何通过上一时刻位置的贝叶斯模型计算此刻的贝叶斯模型。
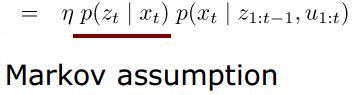
第二步,是校正过程,即又此刻的位置估计observations来强化贝叶斯模型的估计,最前面是正则化系数,所有T的正则化系数相加为1。
定义状态估计p(x | z, u) ,即又此时的observations和之前的控制命令,估计现在的状态。



贝叶斯滤波器分为两步:
第一步很好理解,预测过程,即如何通过上一时刻位置的贝叶斯模型计算此刻的贝叶斯模型。
第二步,是校正过程,即又此刻的位置估计observations来强化贝叶斯模型的估计,最前面是正则化系数,所有T的正则化系数相加为1。
 1300
7265
1300
7265

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















