




1. 关于URDF的一些杂谈
URDF(Unified Robot Description Format), 是一种特殊的xml文件格式, 作为机器人的一种描述文件, 在ROS里面大量使用. 接触ROS比较久的同学, 应该会经常见到一种类似命名的包(package) – xxx_description. 这个包里面就是包含某个机器人的描述文件. 比如pr2_decription, baxter_descrition, 以及ur_description等. 上述举例的机器人描述包都是可以通过apt-get的方式进行安装. 使用命令格式如斯: sudo apt-get install ros-indigo-pr2-descrition, 其中indigo是你所安装的ROS版本名, 后面就是所需要安装的包名, 下划线用中画线代替.
对机器人使用gazebo进行仿真时, 需要加载的机器人模型就是urdf模型, 当然, 单纯的urdf是不能精确描述机器人以及所需要仿真的世界的. gazebo对其进行了扩展, 感兴趣的朋友可以查看gazebo官网的一些教程. 其中会提供一些标签, 对系统动态, 重心等的设定.
如果想使用开源库moveit对机器人进行路径规划, 在moveit setup assistant教程中, 第一步就是关于如何将机器人模型导入进来, 导入的机器人模型就是urdf(导入xacro格式时也是先将其解析为urdf).
诸如这些应用, 当然还不限于这些应用, 可以看到, 了解URDF以及会使用URDF是一件很重要的事情. 而xacro文件, 是提供了一些更为高级编辑方式的宏文件. 这种格式的文件, 在使用时, 均先会调用rosrun xacro xacro.py xxx.urdf.xacro > xxx.urdf, 将其解析成对应的urdf文件. 然后再使用.
下述内容, 仅仅是对urdf文件编辑和查看由最基础的了解, 以方便能够看得懂机器人描述文件, 以及该怎么利用别人已经写好的描述文件进行组合, 重构得到自己的机器人描述文件. 如果是需要更详细, 精确的描述, 则还需要自己再去对urdf文件进行学习.
2. URDF文件
2.1 link 和 joint
在URDF教程中, 第一个出现的就是下图, 很形象的将URDF要定义的主要内容给展现了出来. 一般, 机器人都是由link和joint进行描述. 都会呈现为树状(想象数据结构里面的树), 如图1, 由一个根link(link1)向上, 分别出现了两个分支–link2和link3, 分别由joint连接link. link4就可以类似的理解.
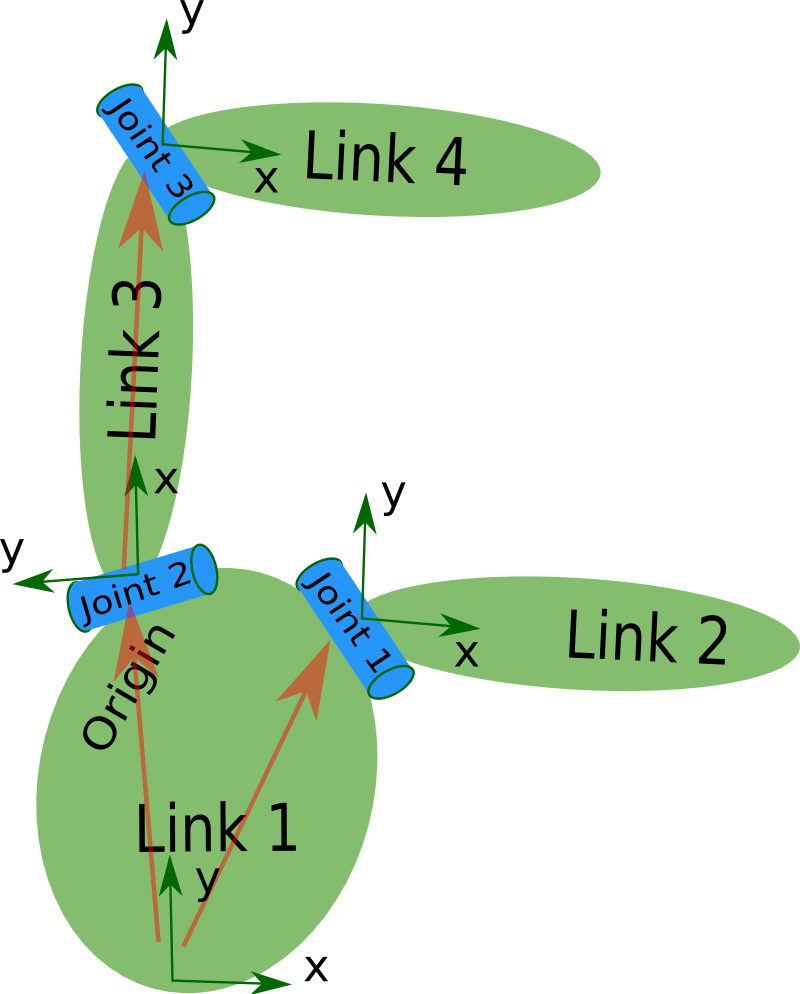
了解机器人的一般描述方式之后, 我们来看一下下图中这个形状的机器人该怎么来描述它.
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
</joint>
</robot>从上述内容可以看到, 机器人最重要的两个内容 – link和joint, 是如何进行定义. 文件都定义了哪些标签, 以及该怎么使用. 其中内容很简单, 我就不浪费篇幅了.
细心的朋友肯定能够感受到, 虽然能够想象的出来大概是一个什么样子, 但是上面的内容是不能够唯一确定一个机器人或者一个…东西…, 因为每个link长什么样子?他们又是一个什么样子的位置关系? 这些在上面的内容中都是没有定义的. 如图中所示, 可能现在每一个不同的同学, 所联想到的样子都是不一样的, 一个仙人掌? 一个两指的夹持器? anythin..当然, 上面所示内容的urdf文件是不能够被正确解析的, 也是不能够可视化出来的. 但上面内容就类似于整个机器人的骨架, 机器人就由这些东西组成. 一共拥有4个link, 和3个joint, 像图中所示的样子连接起来.
2.2 位置
在定义好了机器人的骨架后, 进一步我们可以使用origin子标签进行定义link所应该在的位置. 但是有一点应该注意到, link和link之间是使用joint进行连接, 那么link的位置, 就由连接他的joint确定. 所以, 该子标签是定义在joint内. 在三维空间中, 要精确描述一个刚性体的姿态, 仅仅使用他的xyz坐标是不够的, 还需要使用rpy. rpy角是描述船舶在海中航行时姿态的一种方法. 将船的行驶方向取为z轴, 绕z轴旋转称为滚动(Roll), 绕y轴旋转称为俯仰(Pitch), 绕x轴旋转称为偏转(Yaw). 这种描述方式大量运用于各个领域. 依稀记得, kinect2关于脸部模型匹配的DEMO程序里面, 对脸部的描述就用到了这种描述方式来描述姿态. 在机器人中, 当然运用就更多了. 现在对之前的内容进行扩充. 其中rpy代表的是角度, 用弧度表示.
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz=".5 .3 0.7" rpy="0 0 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-.2 .5 -0.3" rpy="0 0 1.57" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz=".5 0 0.2" rpy="0 0 -1.57" />
</< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1540
1540

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









