







相机模型
数码相机图像拍摄的过程实际上是一个光学成像的过程。相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系以及这四个坐标系的转换。
理想透视模型——针孔成像模型
相机模型是光学成像模型的简化,目前有线性模型和非线性模型两种。实际的成像系统是透镜成像的非线性模型。最基本的透镜成像原理如图所示:
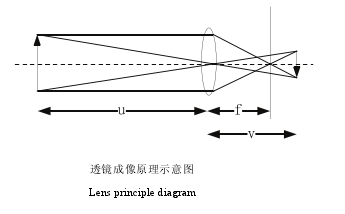
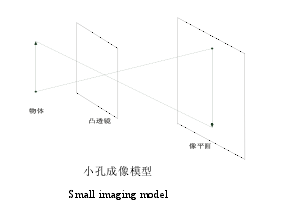
其中 u 为物距, f 为焦距,v 为相距。三者满足关系式:
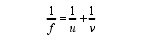
相机的镜头是一组透镜,当平行于主光轴的光线穿过透镜时,会聚到一点上,这个点叫做焦点,焦点到透镜中心的距离叫做焦距 f。数码相机的镜头相当于一个凸透镜,感光元件就处在这个凸透镜的焦点附近,将焦距近似为凸透镜中心到感光元件的距离时就成为小孔成像模型。小孔成像模型如图所示。
小孔成像模型是相机成像采用最多的模型。在此模型下,物体的空间坐标和图像坐标之间是线性的关系,因而对相机参数的求解就归结到求解线性方程组上。四个坐标系的关系图如下图所示,其中 M 为三维空间点,m 为 M 在图像平面投影成的像点。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1389
1389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









