







1.基础矩阵和单应矩阵分析
基础矩阵和单应矩阵的求法在高博的视觉SLAM十四讲中已经说的很明白了,我就直接将公式搬上来:
F矩阵:

通过8点法求得F矩阵后,需要对F矩阵进行SVD分解得到t,R。由于F是t和R矩阵相乘得到,如果观测到的特征点(8点法的点)共面或者相机发生纯旋转,就会出现降维,也就是退化情况,会将噪声的影响放大,最终的结果不稳定。其实很好理解,观测点共面或者纯旋转时t为0,这时正推F也为零,但如果你反推先计算出来F矩阵(不为零),要SVD分解出t,R,你得到的t(一定不为零),R必然不准确,也就可以理解成受噪声影响较大。
注意E矩阵5个自由度,原因是由于秩2约束(减去3个自由度)和缺少尺度因子(减去一个自由度)。这也就是为什么单目初始化的时候无法获得系统尺度的原因,F矩阵7个自由度,下面H矩阵也是一样的情况,缺少尺度。
H矩阵:
p_2=Hp_1=K(R-(tn^t)/d)K^(-1) p_1
通过4点法可以求得H矩阵,由H矩阵的公式可以知道,H是R和t相加减得到,可以直接使用解析法得到R和t。(就是个二元一次方程)当观测点共面或者相机发生纯旋转时,t为0时H不为零,直接等于R,所以H矩阵很适合共面和纯旋转问题,没有将噪声项放大。
注意H矩阵8个自由度。
由前面的分析可以分两种情况
(1)相机发生纯旋转
此时t实际上为0,直接使用H矩阵解算旋转,其对应的重投影误差比较小,如果使用F矩阵,重投影误差肯定较大,且解算出的t不为零,与真实0值有差距。
(2)观测点共面
此时t实际上不为零,如果使用H矩阵计算,会得到t和R,如果使用F矩阵计算,会放大噪声项,重投影误差较大。
因此在ORB_SLAM2中采用同时计算F和H矩阵,选取重投影误差较小的一项作为计算结果。
2.ORB_SLAM2中H矩阵求解位姿
2.1求解单应矩阵归一化直接线性法DLT(注意和SLAM十四讲中不同)
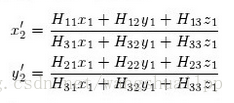
(1)首先定义单应矩阵和对应像素点间的方程如下:

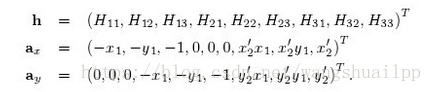
将上式的两个像素点归一化除以z,得到归一化像素坐标下的方程,将方程展开:

将上面的公式整理成矩阵形式:
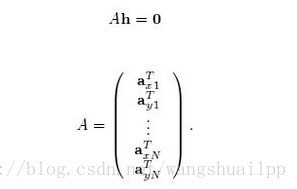
到这里需要注意使用的是归一化8点法求H矩阵,因此的AH=0是一个超定方程,其解不唯一,那么只能对A进行最小二乘求解最优值。采用SVD分解法求这个最小二乘问题:
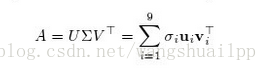
每个奇异值都是一个残差项,(这里也表明奇异值不会小于零,因为残差都是大于等于零)奇异值按照降序排列,因此第9个奇异值最小,其含义就是最优的残差,因此其对应的奇异值向量就是最优值,即最优解。很显然右奇异向量VT是一个9*9的向量,其对应的第9个奇异向量就是最优解。下面证明为什么VT的第9个奇异向量就是最优解。
2.2最优解推导
将Ah=0求代价函数:
这是一个二次函数类型,最优值是导数为0处:
假设这里h的模值为1,即ATA=0,且是一个9*9的方阵。为了使代价函数最优,即是倒数趋于0,即是得到ATA的最小特征值。也是是在||h||=1的约束下,其最小二乘解为矩阵ATA最小特征值所对应的特征向量。
问题就变成了求ATA的最小特征值向量
ATA=(V*DT*UT)(U*DV*T)=V(DTD)*VT
可见ATA的特征向量就是VT的特征向量。因此ORB_SLAM2中求解得到VT之后取出最后一行奇异值向量作为H的最优值,然后整理成3维矩阵形式。(其实其他行的奇异值向量都是一个解,但是不是最优解)
2.2单应矩阵恢复R和t
待续。。。
通过RANSAC方法选取最优结果集合中的最优值。
3.ORB_SLAM2中F矩阵求解位姿
3.1归一化8点法求F基础矩阵
整个过程和求H矩阵相同,也是归一化8点法求F,取ATA最小特征值对应的特征向量。但是由于基本矩阵是奇异的,表现秩为2,但是直接SVD(最小二乘方法)分解得到的矩阵并没办法满足这一性质,因此采取强迫约束,定义一个矩阵F‘来代替F矩阵,其中detF’=0,下是范数||F-F’||达到最小,实现方式就是ORB_SLAM2中所示,再次使用SVD分解上面得到的矩阵F,即F=U*D*VT,其中D=diag(r,s,t),满足r>=s>=t,t的值最接近与零,因此设定D‘=diag(r,s,0),令F’=U*D’*VT,这样使得范数||F-F’||最小。
这里再提一下归一化8点法,其实就是一个简单的变换(包括平移和缩放),将极大的改善问题的求解,提高结果的稳定性。在ORB_SLAM2中定义的T1和T2就是这个变换,相当于每个点都乘以这个变换,因此在结果的最后也需要在乘回来。
3.2基础矩阵恢复R,t
待续。。。














 628
628











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









