






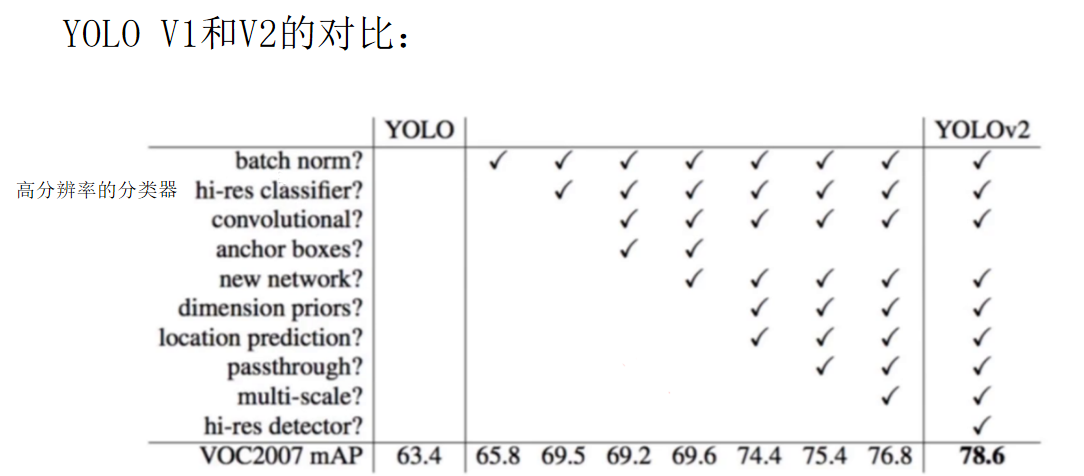
一、YOLOv2的核心改进:从V1到V2的蜕变
YOLOv2作为YOLO系列的第二代算法,在继承V1端到端、单阶段检测的基础上,针对V1存在的小目标检测弱、定位精度低等问题进行了全方位升级,成为目标检测领域的重要里程碑。
(一)Batch Normalization:让训练更稳定
- 核心操作:在所有卷积层后添加Batch Normalization(批归一化),替代V1的Dropout。
- 效果:
- 提升模型收敛速度,使训练过程更稳定。
- 显著提高检测精度,mAP提升约2%。
- 成为后续深度学习模型的标配预处理步骤。
(二)高分辨率分类器:缩小训练与测试的分辨率Gap
- 改进点:
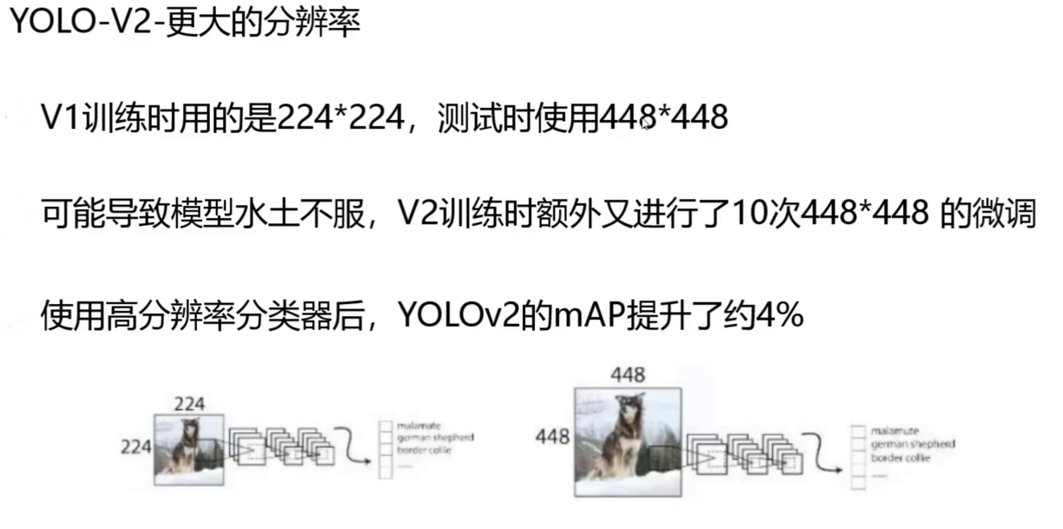
- V1训练时使用224×224分辨率,测试时切换为448×448,导致模型“水土不服”。
- V2在训练后期增加10次448×448分辨率的微调,使模型适应高分辨率输入。
- 效果:mAP提升约4%,检测细节更丰富。
(三)引入先验框(Anchor Boxes):让预测更灵活
- 创新思路:
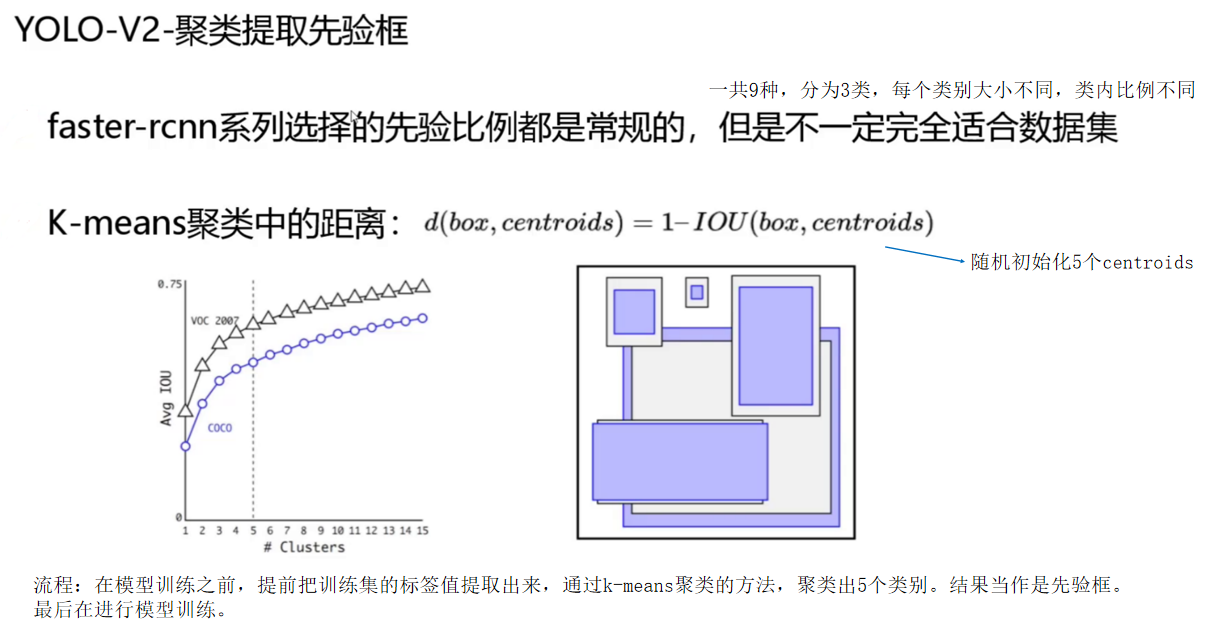
- 借鉴Faster R-CNN的先验框机制,但通过K-means聚类生成更贴合数据集的先验框。
- 聚类流程:从训练集标签中提取真实框,使用K-means算法聚类出5种尺寸的先验框。
- 效果:
- 召回率从81%提升至88%,模型可检测更多潜在目标。
- mAP略有下降(69.5→69.2),但通过后续改进弥补,为多尺度检测奠定基础。
(四)Directed Location Prediction:限制偏移量,稳定训练
- V1的问题:直接预测偏移量可能导致训练初期模型不稳定,出现预测框“漂移”现象。
- V2的改进:
- 预测相对网格单元的偏移量,通过sigmoid函数将tx、ty限制在(0,1)范围内。
- 计算公式:
( b_x = \sigma(t_x) + C_x )
( b_y = \sigma(t_y) + C_y )
( b_w = P_w \cdot e^{t_w} )
( b_h = P_h \cdot e^{t_h} )
其中,( C_x、C_y )为网格坐标,( P_w、P_h )为先验框尺寸。
- 效果:预测框更贴合真实位置,训练过程更稳定。
二、网络结构升级:Darknet-19的诞生
YOLOv2采用全新的基础网络Darknet-19,兼具高效的特征提取能力与轻量化特性。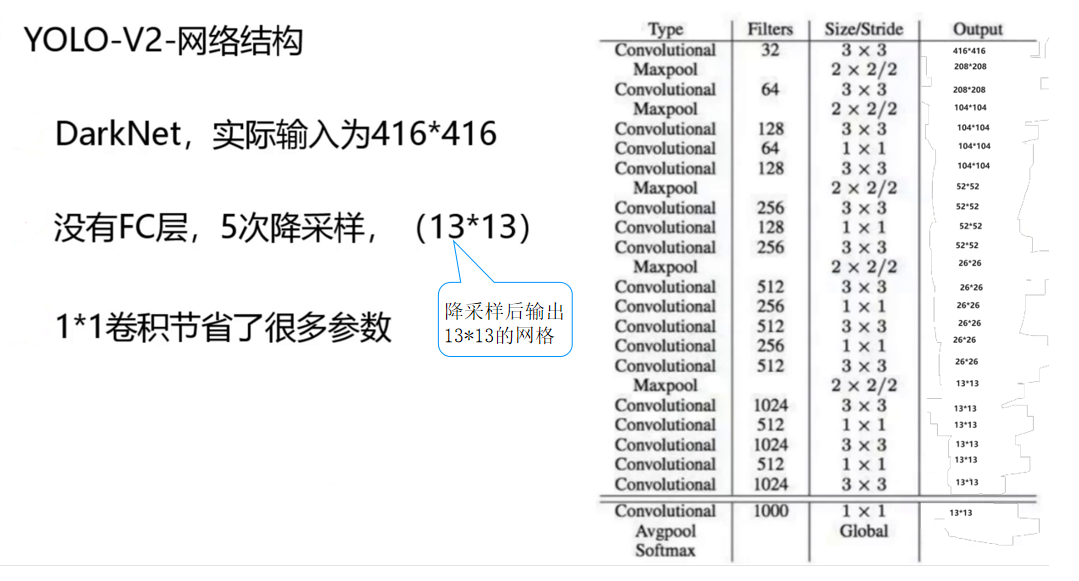
(一)架构亮点
- 层数与操作:19个卷积层+5个最大池化层,全卷积结构(无全连接层),输入尺寸416×416。
- 降采样策略:通过步长为2的卷积层实现降采样,避免池化层的信息丢失。
- 1×1卷积的妙用:
- 降低特征图维度,减少参数量。
- 增加非线性变换,提升特征表达能力。
(二)输出特征与网格设计
- 最终输出:13×13的网格(感受野较大,适合检测大目标)。
- 每个网格的预测:
- 5个先验框,每个框包含:
- 4个坐标值(x,y,w,h)
- 1个置信度(Confidence)
- 20个类别概率(VOC数据集为例)
- 总输出维度:13×13×(5×(4+1)+20)=13×13×45。
- 5个先验框,每个框包含:
三、多尺度训练:让模型适应不同大小的目标
(一)核心思想
- 由于Darknet-19全卷积结构,输入图像尺寸可动态调整(需为32的倍数)。
- 每训练一定iterations,随机切换输入尺寸,范围320×320至608×608。
(二)效果
- 鲁棒性提升:模型对不同尺度的目标检测更均衡,小目标检测能力显著增强。
- 速度与精度的权衡:
- 小尺寸(320×320):速度快,适合实时场景。
- 大尺寸(608×608):精度高,适合对细节要求高的任务。
四、特征融合与感受野优化
(一)细粒度特征融合(Passthrough Layer)
- 问题:高层特征图(13×13)感受野大,但丢失小目标细节;低层特征图(26×26、52×52)保留更多细节,但语义信息不足。
- 解决方案:
- 将26×26的特征图通过Passthrough层(通道拆分与叠加)与13×13特征图融合。
- 融合后特征图维度:13×13×(1024+256)=13×13×1280,增强小目标的检测能力。
(二)感受野分析:小卷积核的优势
- 3×3卷积的堆叠:3个3×3卷积层的感受野等价于7×7卷积核,但参数量更少(27C² vs. 49C²)。
- 非线性增强:更多卷积层引入更多非线性变换,特征表达更丰富。
五、YOLOv2的性能表现与应用场景
(一)对比传统算法
| 算法 | mAP(VOC 2007) | FPS | 特点 |
|---|---|---|---|
| YOLOv1 | 63.4 | 45 | 速度快,小目标检测弱 |
| YOLOv2 | 78.6 | 67 | 速度与精度平衡 |
| Faster R-CNN | 73.2 | 5 | 精度高,速度慢 |
(二)应用领域
- 实时检测:视频监控、无人机巡检(高FPS优势)。
- 多尺度目标检测:自然场景图像(如COCO数据集),兼顾大、中、小目标。
- 工业检测:零件缺陷检测(高分辨率输入下的细节捕捉能力)。
六、总结:YOLOv2的传承与启示
YOLOv2通过Batch Normalization、先验框机制、多尺度训练等关键改进,在速度与精度之间找到了理想平衡点,成为后续YOLOv3/v4/v5的重要基石。其设计理念(如全卷积结构、特征融合、轻量化)对现代目标检测算法仍具有深远影响。无论是学术研究还是工业落地,YOLOv2都为我们提供了宝贵的思路——在追求更高精度的同时,不忘实时性的本质需求。

















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









