






说明:使用
硬件:英伟达Jetson Orin nano super
系统:Jetpack6.2+UBUNTU22.04+ROS2+YOLOV12
1、启动ROS2下的USB摄像头驱动
ros2 launch usb_cam usb_cam_launch.py

启动成功后如下: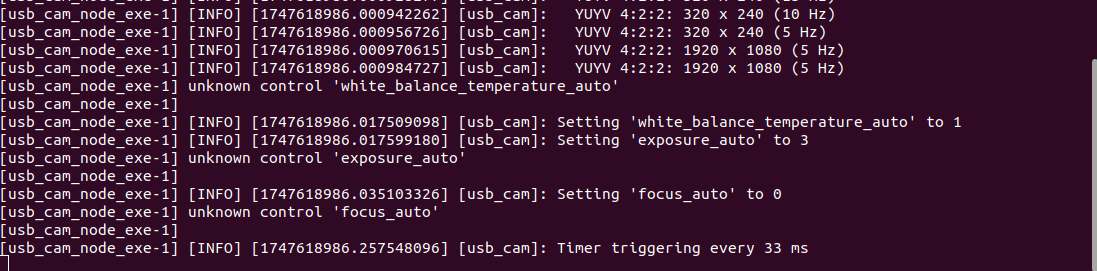
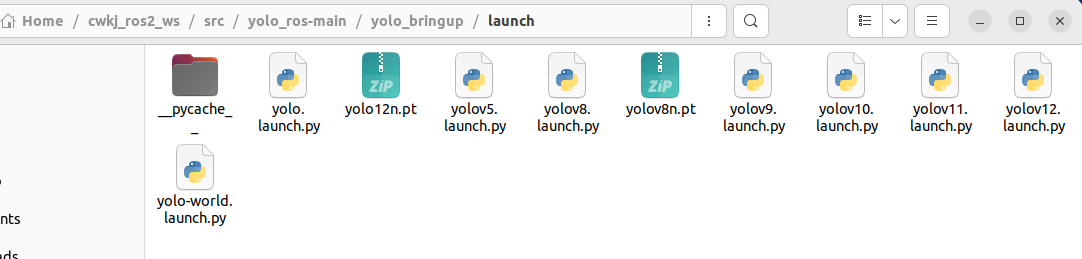
2、启动对应的yolo版本脚本
查看系统已安装的可以使用版本,如下
3、以yolov12为例,按照以下命令启动
ros2 launch yolo_bringup yolov12.launch.py
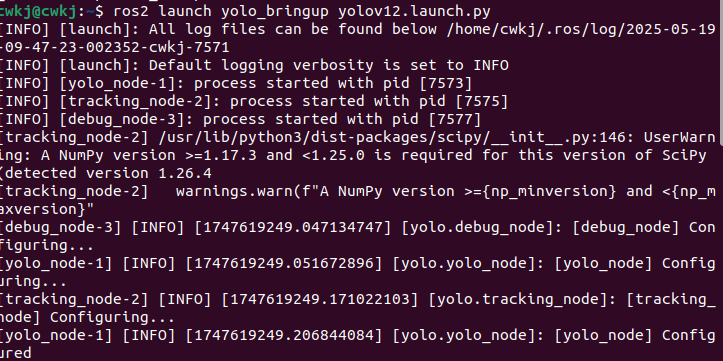
启动成功后如下: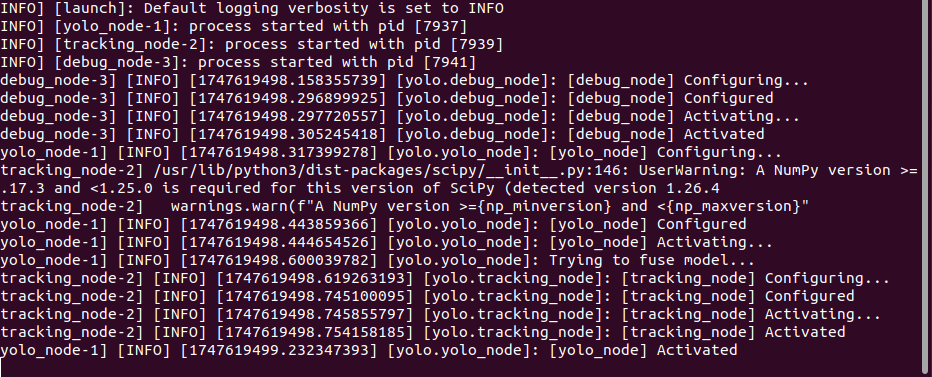
4、启动RVIZ2可视化界面查看
可以看到,使用yolov12版本,对应的n.pt权重文件可以进行识别,并且准确率和识别速度都较高



















 623
623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











