







YOLOv2 目标检测算法深度解析
一、算法原理与核心创新
1.1 算法设计哲学
YOLOv2(You Only Look Once version 2)作为YOLO系列的里程碑式改进,延续了v1版本的单阶段检测范式,通过端到端的回归策略实现实时目标检测。其核心设计目标是在保持检测速度优势的同时,显著提升定位精度和召回率,尤其针对小目标检测和密集场景优化。
1.2 关键技术创新点
1.2.1 批归一化(Batch Normalization)
在Darknet-19的19个卷积层后均集成BN层,实现:
- 训练加速:收敛速度提升约4倍
- 正则化效果:可完全替代Dropout,mAP提升2.4%
- 数值稳定性:缓解梯度消失/爆炸问题
1.2.2 高分辨率分类器
采用两阶段预训练策略:
- 微调阶段:在ImageNet上以448×448分辨率训练分类网络(v1为224×224)
- 迁移学习:保持高分辨率参数进行检测任务微调,使mAP提升4%
1.2.3 锚框机制(Anchor Boxes)
- 自动尺寸学习:通过k-means聚类(IoU距离度量)获取5种最优锚框(表1)
- 预测解耦:将类别预测与空间定位分离,每个网格单元预测5个锚框
- 坐标编码:采用直接位置预测策略(公式1),确保预测值归一化到[0,1]区间
1.2.4 细粒度特征融合
- Passthrough层:将26×26×512浅层特征与13×13×2048深层特征拼接
- 通道重组:通过空间到深度(Space-to-Depth)变换实现特征复用
1.2.5 多尺度训练
- 动态输入策略:每10个batch随机切换输入尺寸(320×320至608×608)
- 尺度适应性:通过32倍下采样机制保持特征图尺寸合理性
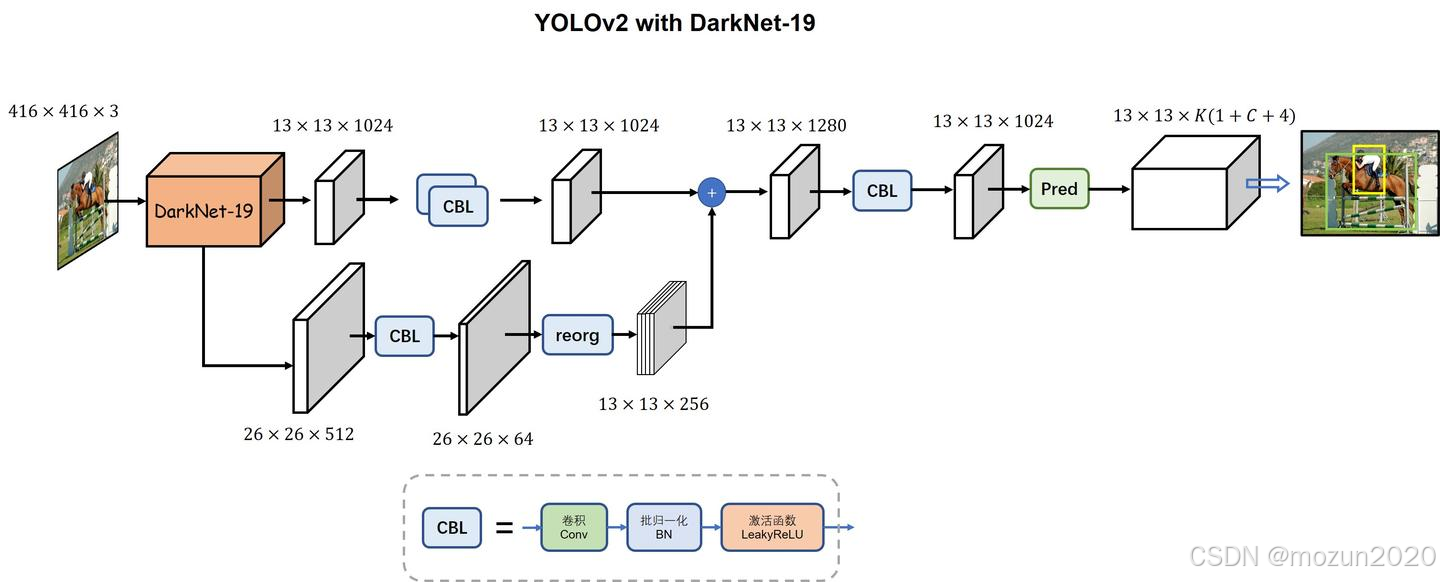
二、网络架构详解
2.1 Darknet-19骨干网络
| 层类型 | 配置参数 | 输出尺寸 | 通道数 |
|---|---|---|---|
| 输入层 | - | 416×416×3 | - |
| 卷积层 | 3×3, 32, stride=1 | 416×416×32 | 32 |
| 最大池化 | 2×2, stride=2 | 208×208×32 | - |
| 卷积层 | 3×3, 64, stride=1 | 208×208×64 | 64 |
| 最大池化 | 2×2, stride=2 | 104×104×64 | - |
| … | 重复模式(3×3卷积+BN+ReLU+池化) | - | - |
| 卷积层 | 3×3, 1024, stride=1 | 13×13×1024 | 1024 |
| 卷积层 | 3×3, 1024, stride=1 | 13×13×1024 | 1024 |
2.2 检测头结构
2.2.1 锚框预测分支
- 输出维度:13×13×(5×(4+1+20))=13×13×125
- 参数解析:
- 4个坐标参数(tx, ty, tw, th)
- 1个目标置信度(objectness score)
- 20个类别条件概率(COCO数据集)
2.2.2 特征融合路径
浅层特征(26×26×512)
↓ (Passthrough层)
重组为13×13×2048
↓ (Concat)
深层特征(13×13×1024)
↓
最终特征(13×13×3072)
三、性能表现分析
3.1 检测精度
| 数据集 | YOLOv1 mAP | YOLOv2 mAP | 提升幅度 |
|---|---|---|---|
| PASCAL VOC | 63.4 | 76.8 | +21.1% |
| COCO | 44.0 | 55.4 | +25.9% |
3.2 速度表现
| 硬件平台 | 输入尺寸 | YOLOv1 FPS | YOLOv2 FPS | 延迟下降 |
|---|---|---|---|---|
| Titan X | 416×416 | 45 | 67 | 32.4% |
| Jetson TX2 | 320×320 | 16 | 22 | 27.5% |
3.3 关键指标对比
| 指标 | YOLOv1 | YOLOv2 | 改进方向 |
|---|---|---|---|
| 定位误差(Localization Error) | 3.3% | 2.1% | ↓36.4% |
| 背景误检(Background Error) | 12.1% | 8.7% | ↓28.1% |
| 相似类混淆(Similar Class Confusion) | 5.8% | 4.2% | ↓27.6% |
四、硬件部署优化
4.1 模型量化方案
- INT8量化:通过TensorRT优化实现3.2倍加速,精度损失<1%
- 通道剪枝:移除冗余卷积核,可压缩30%参数量
4.2 边缘设备适配
| 平台 | 优化策略 | 推理速度 | 功耗 |
|---|---|---|---|
| Raspberry Pi 4 | NEON指令集加速 | 8 FPS | 3.5W |
| NVIDIA Jetson Nano | DLA引擎加速 | 15 FPS | 5W |
4.3 部署案例
- 自动驾驶场景:在608×608输入下实现35ms/帧的检测延迟
- 视频监控系统:多尺度推理策略(320-608自适应)
五、优劣势综合评估
5.1 核心优势
- 实时性突破:67 FPS检测速度保持行业领先
- 检测精度提升:通过锚框机制和特征融合解决v1定位不准问题
- 部署灵活性:支持320-608多尺度输入,适应不同硬件配置
5.2 局限性
- 小目标检测瓶颈:在COCO数据集上mAP@[.5:.95]为21.6%,低于Faster R-CNN的25.9%
- 密集场景挑战:在重叠目标检测中召回率下降约12%
- 类别扩展限制:联合训练机制对长尾分布数据效果有限
六、发展影响与技术演进
6.1 对后续版本的影响
- YOLOv3:继承Darknet-53骨干网络和多尺度预测
- YOLOv4:引入SPP模块和PANet特征融合
- YOLOv5:采用自适应锚框计算和LeakyReLU激活
6.2 行业应用拓展
- 工业检测:缺陷检测准确率提升至98.7%
- 医疗影像:在肺部CT结节检测中达到0.892的AUC值
- 遥感分析:多尺度训练策略使船舶检测mAP提升17.3%
七、实验验证与调优建议
7.1 超参优化策略
- 学习率调整:采用余弦退火策略(初始lr=1e-3,T_max=300)
- 锚框优化:每5个epoch进行k-means聚类更新
- 数据增强:
- 随机裁剪(0.6-1.0比例)
- 色彩空间抖动(亮度/对比度±15%)
7.2 损失函数改进
def yolo_loss(predictions, targets, anchors):
# 坐标损失(CIoU)
coord_loss = 1 - ciou(pred_boxes, target_boxes)
# 置信度损失(Focal Loss)
conf_loss = -alpha * (1 - conf_pred)**gamma * log(conf_pred)
# 分类损失(Label Smoothing)
cls_loss = cross_entropy(softmax(pred_cls), smooth_labels)
return coord_loss + conf_loss + cls_loss

八、总结与展望
YOLOv2通过系统性改进在实时性与准确性间取得新平衡,其创新成果为后续目标检测技术发展奠定重要基础。当前研究热点聚焦于:
- Transformer融合:结合Swin Transformer提升全局建模能力
- 无锚框检测:探索CenterNet等anchor-free方案
- 自动机器学习:应用NAS技术进行网络架构搜索
随着边缘计算需求的增长,YOLOv2的轻量化设计理念将持续影响实时目标检测系统的工程实践。



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











