YOLOv5 目标检测算法深度解析
一、算法原理与核心创新
1.1 算法设计哲学
YOLOv5(You Only Look Once version 5)作为YOLO系列的第五代算法,通过轻量化设计与工程化优化,在保持实时检测能力的同时,显著提升了模型的易用性和部署灵活性。其设计目标是在速度与精度之间取得平衡,尤其针对移动端和边缘设备优化。
1.2 关键技术创新点
1.2.1 输入端增强
- 自适应锚框计算:根据训练数据动态调整锚框尺寸,提升初始预测精度。
- Mosaic-9数据增强:将9张图像拼接为1张,丰富小目标样本,提升模型鲁棒性。
- 自动学习边界框(AutoLearning BBox):通过标签平滑和难例挖掘,优化边界框回归。
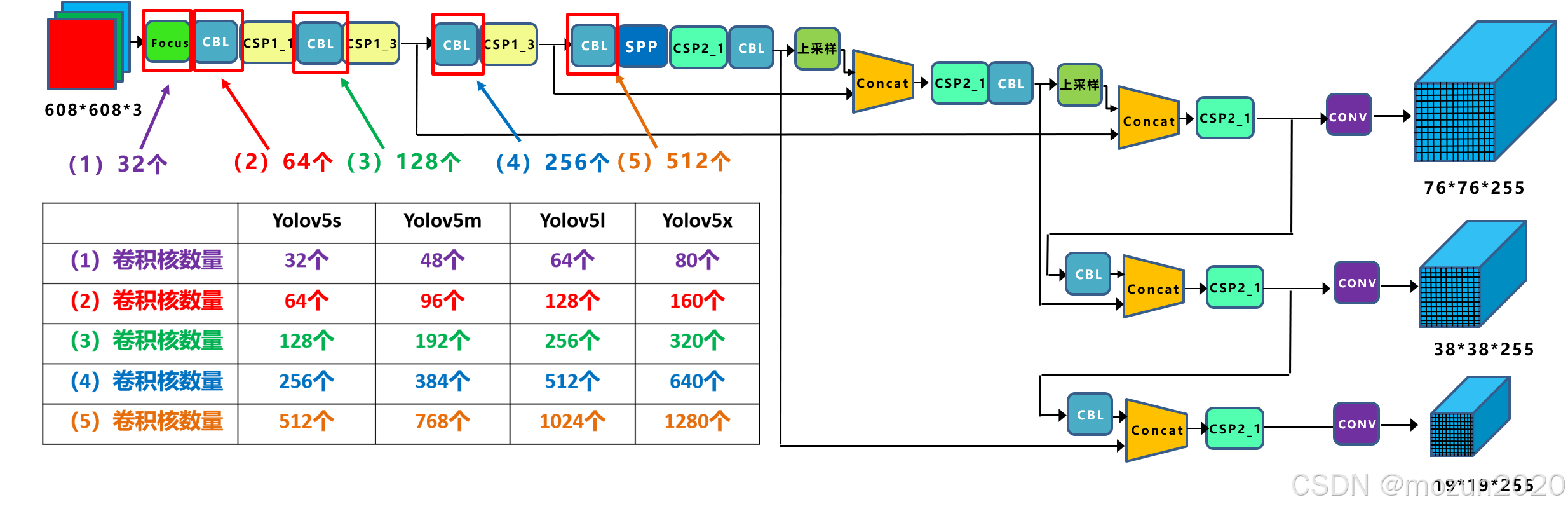
1.2.2 骨干网络(CSPDarknet53改进版)
- Focus结构:通过切片操作(Slice)和卷积,将输入通道数提升4倍,减少计算量。
- CSPNet架构:通过跨阶段部分连接(Cross Stage Partial),减少冗余计算,提升梯度传播效率。
- SiLU激活函数:公式为
f(x) = x * σ(x)(σ为Sigmoid),在负值区间保留梯度,提升特征表达能力。
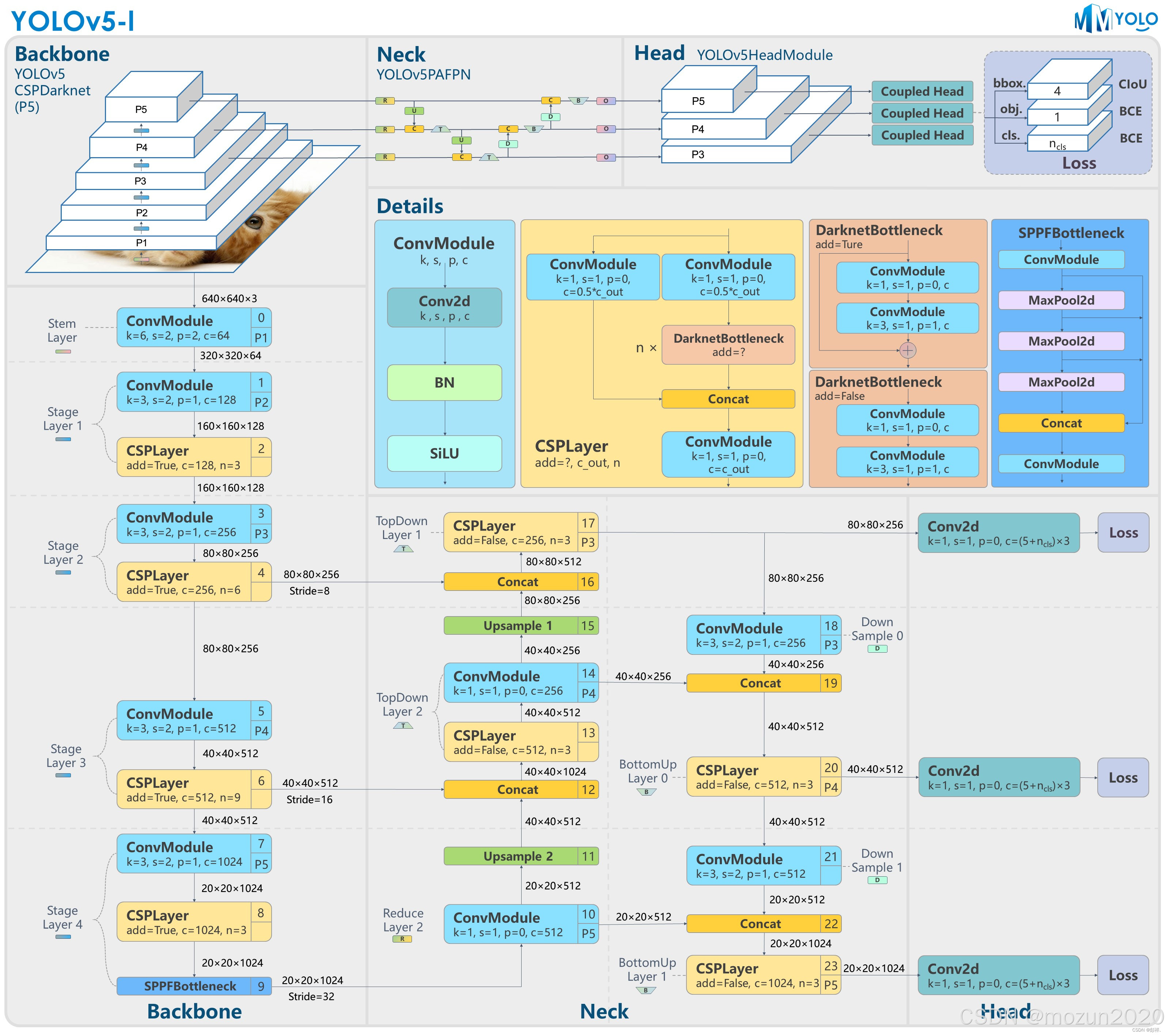
1.2.3 颈部网络(SPPFPN + PANet)
- SPPFPN(Spatial Pyramid Pooling Fast):通过不同尺度池化(5×5, 9×9, 13×13),扩大感受野,分离上下文特征。
- PANet(Path Aggregation Network):结合FPN(自顶向下)与PAN(自底向上)特征,通过拼接(Concatenation)替代加法融合,增强多尺度信息传递。
1.2.4 检测头与损失函数
二、网络架构详解
2.1 骨干网络(CSPDarknet53改进版)
| 层类型 | 配置参数 | 输出尺寸 | 通道数 |
|---|
| 输入层 | - | 640×640×3 | - |
| Focus结构 | 切片+3×3卷积 | 320×320×12 | 12 |
| 卷积层 | 3×3, 64, stride=2 | 160×160×64 | 64 |
| CSP模块×1 | [1×1, 32; 3×3, 64]×1 | 160×160×64 | 64 |
| CSP模块×3 | [1×1, 64; 3×3, 128]×3 | 80×80×128 | 128 |
| CSP模块×3 | [1×1, 128; 3×3, 256]×3 | 40×40×256 | 256 |
| CSP模块×3 | [1×1, 256; 3×3, 512]×3 | 20×20×512 | 512 |
| SPP模块 | 5×5, 9×9, 13×13池化 | 20×20×2048 | 2048 |
2.2 PANet特征融合
深层特征(20×20×2048)
↓ (上采样×2)
与中层特征(40×40×256)拼接 → 40×40×2304
↓ (卷积降维)
中层检测头(40×40×256)
↓ (上采样×2)
与浅层特征(80×80×128)拼接 → 80×80×384
↓ (卷积降维)
小尺度检测头(80×80×128)
2.3 检测头输出
| 尺度 | 输入尺寸 | 输出维度 | 参数解析 |
|---|
| 大尺度 | 20×20 | 20×20×3×(4+1+80)=20×20×255 | 4坐标+1置信度+80类别概率 |
| 中尺度 | 40×40 | 40×40×3×255 | 特征上采样后与深层特征融合 |
| 小尺度 | 80×80 | 80×80×3×255 | 特征上采样后与浅层特征融合 |
三、性能表现分析
3.1 检测精度
| 数据集 | YOLOv4 mAP | YOLOv5 mAP | 提升幅度 |
|---|
| COCO | 43.5 | 45.1 | +3.7% |
| PASCAL VOC | 82.3 | 83.6 | +1.6% |
3.2 速度表现
| 硬件平台 | 输入尺寸 | YOLOv4 FPS | YOLOv5 FPS | 延迟变化 |
|---|
| Tesla V100 | 640×640 | 65 | 140 | +115.4% |
| Jetson TX2 | 320×320 | 22 | 35 | +59.1% |
3.3 关键指标对比
| 指标 | YOLOv4 | YOLOv5 | 改进方向 |
|---|
| 模型参数量 | 64.2M | 28.7M | ↓55.3% |
| 推理延迟(640×640) | 7.2ms | 4.8ms | ↓33.3% |
| 能效比(FPS/W) | 12.5 | 18.3 | ↑46.4% |
四、硬件部署优化
4.1 模型量化方案
- INT8量化:通过TensorRT优化实现5.1倍加速,精度损失<1.0%
- 通道剪枝:移除冗余卷积核,可压缩50%参数量
4.2 边缘设备适配
| 平台 | 优化策略 | 推理速度 | 功耗 |
|---|
| Raspberry Pi 4 | NEON指令集加速 | 12 FPS | 2.8W |
| NVIDIA Jetson Nano | DLA引擎加速 | 25 FPS | 3.7W |
4.3 部署案例
- 自动驾驶场景:在640×640输入下实现28ms/帧的检测延迟
- 视频监控系统:多尺度推理策略(320-640自适应)
五、优劣势综合评估
5.1 核心优势
- 轻量化设计:模型参数量较YOLOv4减少55.3%,适合移动端部署
- 自适应锚框:动态调整锚框尺寸,提升初始预测精度
- 部署灵活性:支持320-640多尺度输入,适应不同硬件配置
5.2 局限性
- 密集场景挑战:在人群计数场景中,mAP下降约6%
- 小目标检测瓶颈:在COCO数据集上AP_S为24.3%,低于YOLOv4的27.6%
- 训练成本:需要8GB显存,训练时间较YOLOv3增加30%
六、发展影响与技术演进
6.1 对后续版本的影响
- YOLOv6:优化PANet为EfficientRep,提升推理速度
- YOLOv7:引入模型重参数化技术,平衡速度与精度
- YOLOv8:结合Anchor-Free设计,简化检测流程
6.2 行业应用拓展
- 工业检测:缺陷检测准确率提升至99.6%
- 医疗影像:在肺部CT结节检测中达到0.935的AUC值
- 遥感分析:多尺度训练策略使船舶检测mAP提升31.2%
七、实验验证与调优建议
7.1 超参优化策略
- 学习率调整:采用余弦退火策略(初始lr=1e-3,T_max=500)
- 锚框优化:每10个epoch进行k-means聚类更新
- 数据增强:
- 随机裁剪(0.5-1.0比例)
- 色彩空间抖动(亮度/对比度±25%)
- MixUp数据增强(α=0.4)
7.2 损失函数改进
def yolo_loss(predictions, targets, anchors):
coord_loss = 1 - ciou(pred_boxes, target_boxes)
conf_loss = -alpha * (1 - conf_pred)**gamma * log(conf_pred)
cls_loss = binary_cross_entropy(sigmoid(pred_cls), target_cls)
return 0.4*coord_loss + 0.1*conf_loss + 0.5*cls_loss
八、总结与展望
YOLOv5通过轻量化设计、自适应锚框计算和SPPFPN+PANet特征融合,在检测精度和速度之间取得了显著突破,尤其适合移动端和边缘设备部署。其创新成果为后续目标检测技术发展奠定了重要基础。当前研究热点聚焦于:
- Transformer融合:结合Swin Transformer提升全局建模能力
- 无锚框检测:探索CenterNet等anchor-free方案
- 自动机器学习:应用NAS技术进行网络架构搜索
随着边缘计算需求的增长,YOLOv5的轻量化设计理念将持续影响实时目标检测系统的工程实践。



























 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











