






💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者,方便大家进行学习!亲民!!!
📝目前更新:🌟🌟🌟电力系统相关知识,期刊论文,算法,机器学习和人工智能学习。
🚀支持:🎁🎁🎁如果觉得博主的文章还不错或者您用得到的话,可以关注一下博主,如果三连收藏支持就更好啦!这就是给予我最大的支持!

📋📋📋本文目录如下:⛳️⛳️⛳️
目录
1 模糊 PID 控制算法研究
传统的 PID 控制器是伺服系统控制中应用最广泛最基本的一种控制器 , 它具有简单、稳定性好、可靠性高等优点。PID 调节规律对相当多的工业控制对象 , 特别是对于线性定常系统控制是非常有效的。其调节过程的品质取决于 PID 控制器各个参数的整定。智能控制的模糊逻辑控制具有实现的简易性和快速性 , 通常以系统误差 e 和误差变化 ec 为输入语句变量 , 因此它具有类似于常规的 PD 控制器特性。由经典控制理论可知 ,PD 控制器可获得良好的系统动态特性 , 但无法消除系统的静态误差 [4]。从以上分析可知 , 模糊 PID 控制的设计主要涉及两个方面的内容。一是模糊控制器和常规PID 的混合结构 ; 二是常规 PID 参数的模糊自整定技术。模糊 PID 复合控制框图如图 1 所示。
为了满足不同误差 e 和误差变化 ∆e 对 PID 参数自整定的要求 , 利用模糊控制规则在线对 PID 参数进行修改 , 便构成了参数模糊自整定 PID 控制器。这种技术的设计思想是先找出 PID 三个参数与误差 e 和误差变化 ec 之间的模糊关系 , 在运行中通过不断检测 e 和 ec , 再根据模糊控制原理
来对三个参数进行在线修改以满足在不同 e 和 ec 时对控制器参数的不同要求 , 从而使被控对象具有良好的动、静态性能 [5]。
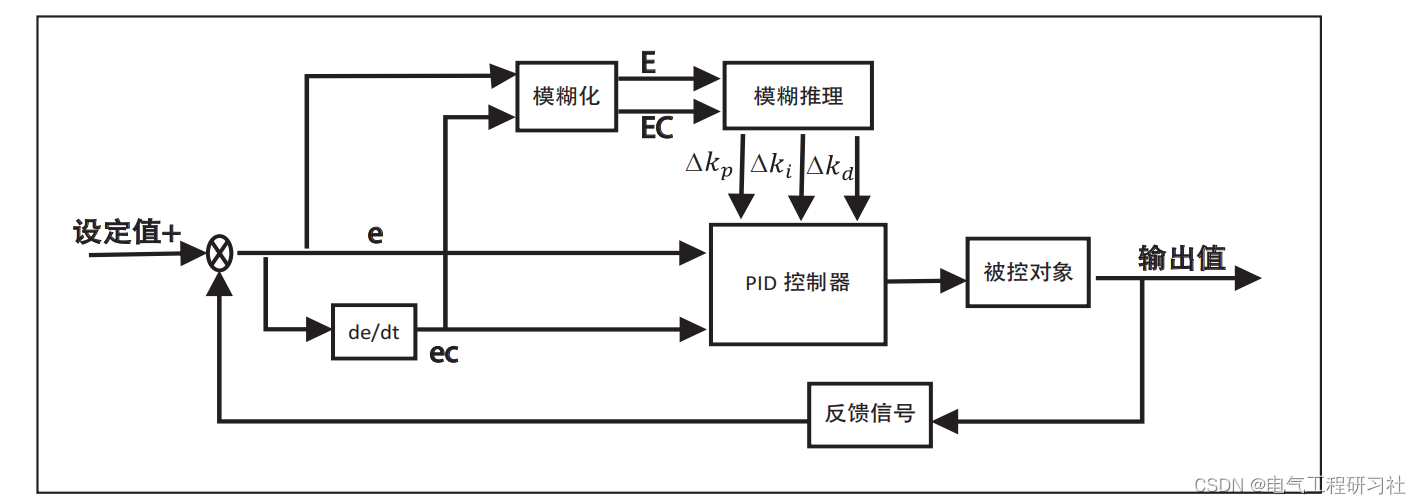
图1 模糊 PID 控制系统方框图
2 数学模型
见第5部分。
3 蚂蚁优化算法
见这篇文章:智能优化算法—蚁群算法
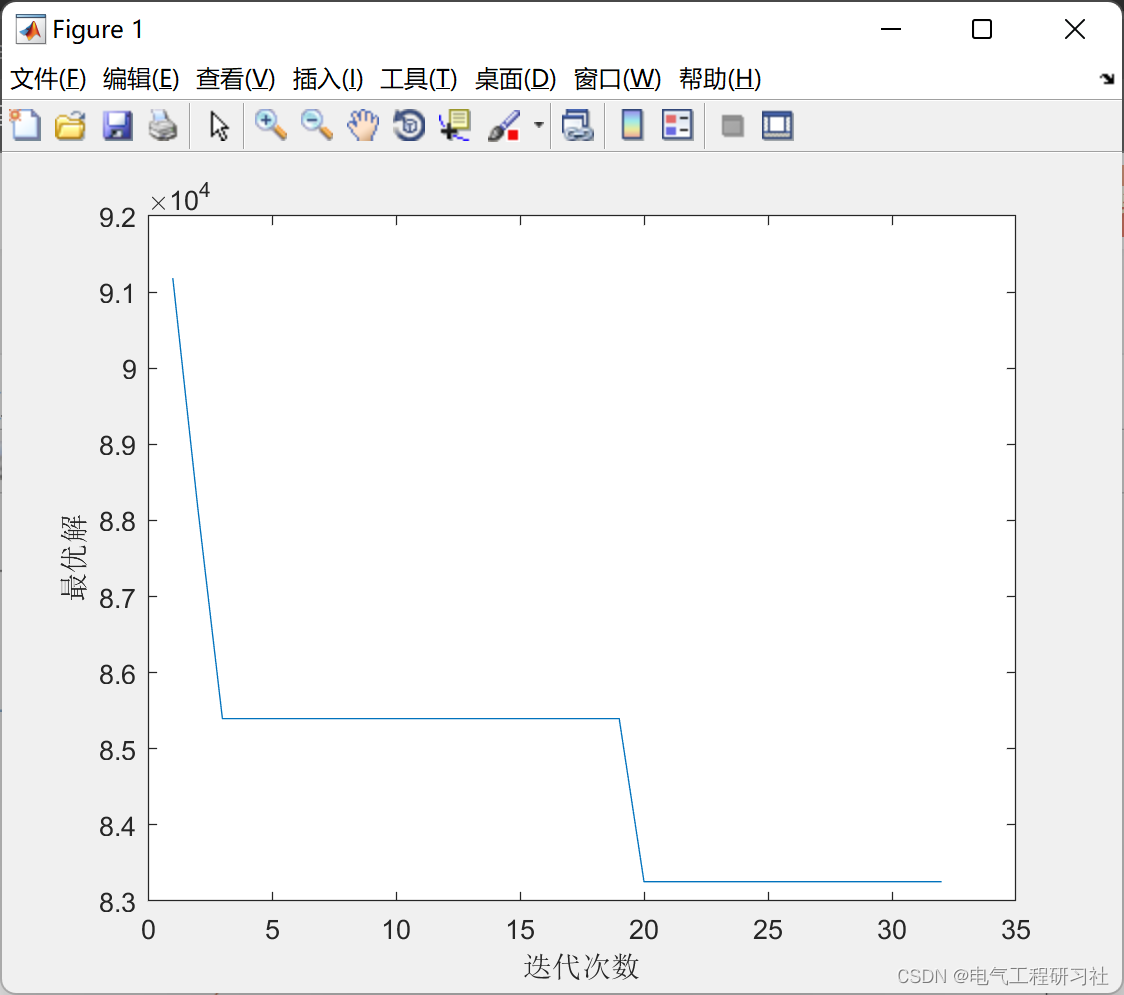
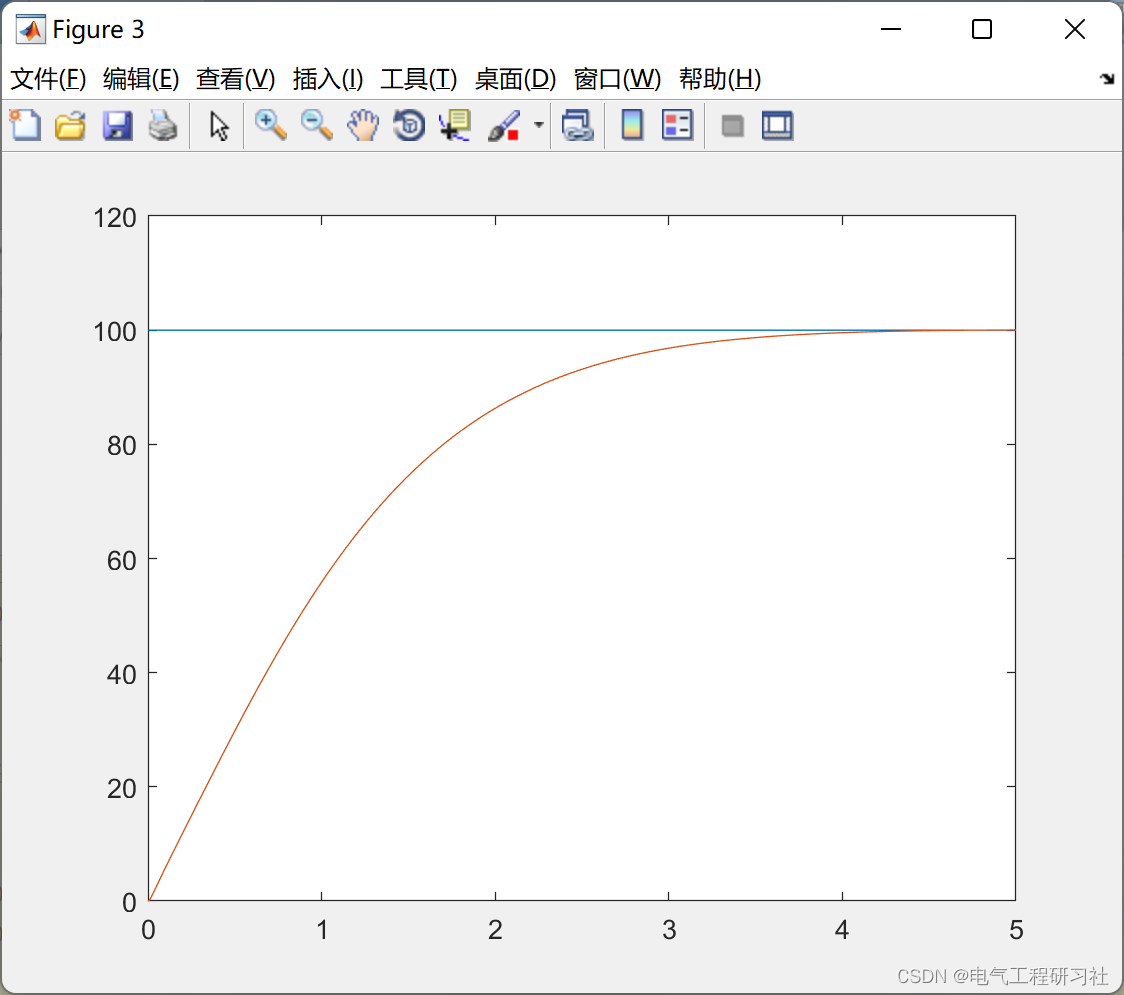
4 运行结果
5 Matlab代码
博客主页:电气辅导帮















 2446
2446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









