






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在信号处理、模式识别等系统中,多层前馈网络是应用较为广泛的模型。但是大部分基于反向传播的多层前馈网络的学习算法必须基于某种非线性优化技术的缺点,计算量大、学习速度慢。径向基函数神经网络(Radial Basis Function Neural Network)理论为多层前馈网络的学习提供了一种新颖而有效的手段。RBF网络不仅具有良好的推广能力,而且计算量少,学习速度一般也比其它算法快得多。
基于径向基函数(Radial Basis Function,RBF)神经网络的机械臂运动控制算法是一种先进的控制策略,它利用RBF神经网络的非线性映射能力来处理复杂的机械臂动力学模型,实现精确和快速的运动控制。下面是对这种算法的基本原理、结构以及应用的简要介绍:
基本原理
-
径向基函数神经网络:RBF神经网络是一种人工神经网络,特别适合于解决非线性问题。它由输入层、隐藏层(包含径向基函数单元)和输出层组成。隐藏层的每个神经元对输入数据计算加权径向基函数值,这一过程可以理解为对输入空间进行局部特性的提取;输出层则通过线性组合这些激活值来得到最终的输出结果。
-
在机械臂控制中的应用:机械臂的运动控制面临的主要挑战是其动力学模型的非线性、多变量性和时变性。RBF神经网络能够学习并近似这些复杂关系,提供给控制器一个从期望运动轨迹到所需关节力矩或速度的映射。通过调整网络参数,可以使机械臂按照预定轨迹精确移动,同时处理外部扰动和内部参数变化。
算法结构
- 输入层:接收机械臂当前的关节角度、角速度、目标位置等信息作为输入信号。
- 隐藏层:选择合适的径向基函数(如高斯函数)并设定中心和宽度,根据输入数据计算隐藏层神经元的激活值。隐藏层的设计很关键,需要根据问题的特性来确定中心点的位置和数量。
- 输出层:通过权重矩阵连接隐藏层和输出层,输出层的节点数量与机械臂控制的自由度数相同,直接给出关节力矩或速度指令。
- 训练阶段:使用已知的机械臂动态模型数据或实际操作中收集的数据来训练网络,优化网络权重,使得网络输出接近理想控制信号。
应用优势
- 非线性逼近能力强:RBF神经网络能够有效逼近复杂的非线性函数,适合处理机械臂控制中的非线性动力学问题。
- 实时性:一旦训练完成,RBF网络的计算效率高,可以实现实时或近实时控制。
- 自适应性:网络可以根据不同工况和环境变化自适应调整,提高控制系统的鲁棒性。
- 易于实现:相比其他复杂的控制理论,基于RBF的控制算法实现相对简单,便于工程师和研究人员应用。
结论
基于RBF神经网络的机械臂运动控制算法通过其强大的非线性建模和学习能力,为实现机械臂的精确控制提供了一种有效的方法。随着机器学习技术的不断进步,结合深度学习等先进技术的新型RBF网络在机械臂控制领域的应用将更加广泛,进一步提升控制精度和适应性。
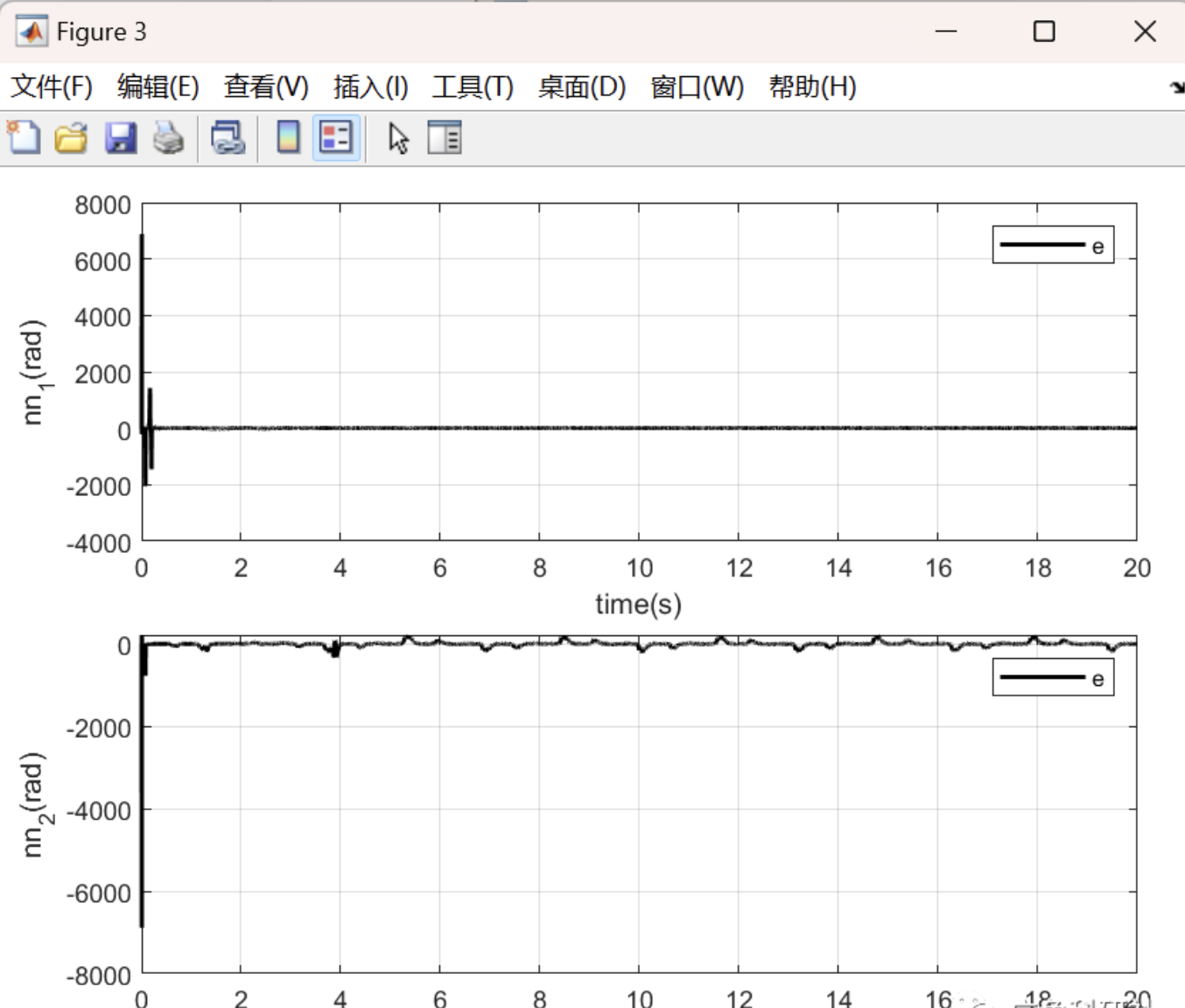
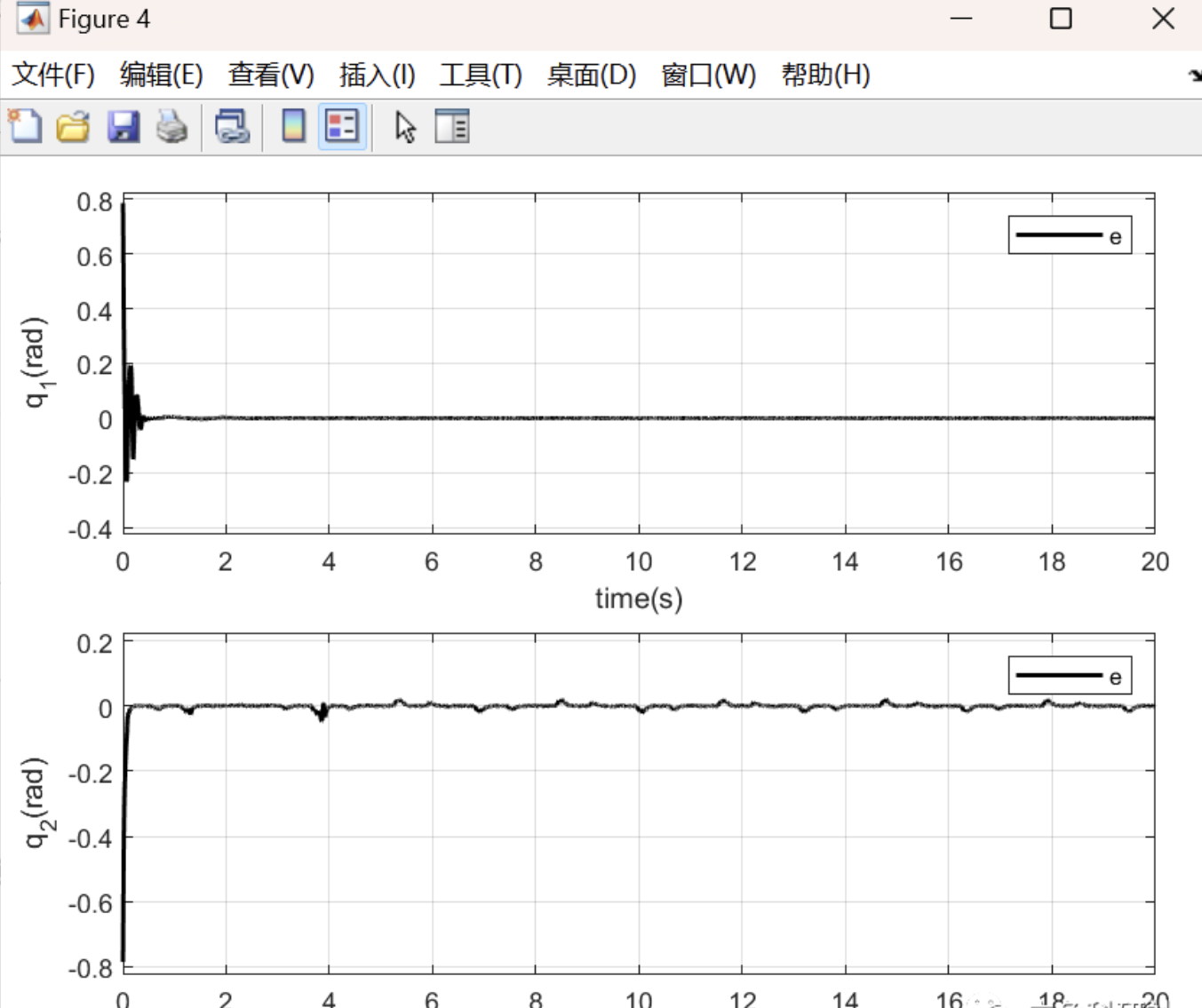
📚2 运行结果
主函数部分代码:
clc; clear all;
addpath(genpath('.'));
% simulation setup
sim_period = 0.001;
t = 0:sim_period:20;
sample_size = size(t, 2);
% % reference trajectory
xd(1,:)=sin(t);
xd(2,:)=cos(t);
xd(3,:)=-sin(t);
% parameter of neural network
variance = 25;
Node = 7;
W1 = zeros(Node, 1);
W2 = zeros(Node, 1);
Mu1 = [-1:2/(Node-1):1]*1/3;
Mu2 = [-1:2/(Node-1):1]*1/3;
Mu = [Mu1; Mu2];
k1=0.01;k2=0.01;
F1= 500*eye(Node);
F2= .5*eye(Node);
% intial state
x(:,1) = [0.2; 0];
x_hat(:,1) = [0.1; 0];
global D K1 K2
H_bar = zeros(Node, 1);
for i=1:sample_size
x1 = x(1,i);
x2 = x(2,i);
x_hat1 = x_hat(1,i);
x_hat2 = x_hat(2,i);
% model
m=1;l=1;M=0.5;g=9.8;
fx=-0.5*m*g*l*sin(x1)/M;
gx=1/M;
% ann
y_tilde = x1 - x_hat(1,i);
H = zeros(Node,1);
for j=1:Node
H(j) = exp(-norm(x(:,i)-Mu(:,j))^2/(variance));
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]王旭东,邵惠鹤.RBF神经网络理论及其在控制中的应用[J].信息与控制,1997(04):32-44.















 355
355











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









