






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
随着科技的飞速发展,自主飞行固定翼和四旋翼飞行器在众多领域展现出了非凡的应用价值,从军事侦察、航拍测绘到物流配送、应急救援等,它们凭借各自独特的飞行特性与优势,成为了现代智能空中装备的主力军。而其设计与控制技术作为保障飞行安全、实现高效任务执行的关键,涵盖了多个复杂且精细的环节。
一、固定翼飞行器设计要点
- 机体结构设计:固定翼飞行器的机体需要具备良好的空气动力学外形,以减少飞行阻力、提高升力效率。通常采用流线型设计,如常见的下单翼、中单翼或上单翼布局,结合机身的合理比例,确保飞行器在不同飞行姿态下的稳定性与操控性。机翼的形状、翼展、翼弦以及后掠角等参数的优化,更是直接关乎飞行性能,例如长航时固定翼无人机往往设计有大展弦比机翼,以增强巡航升力。
- 动力系统配置:动力来源一般为活塞发动机、涡轮喷气发动机或电动螺旋桨系统等。根据飞行器的用途与性能需求,合理选择发动机类型及其配套的螺旋桨、燃油系统或电池组。在军事高速侦察固定翼飞机上,涡轮喷气发动机能够提供强大动力,满足高速飞行需求;而民用小型测绘固定翼无人机,多采用高效节能的电动螺旋桨系统,兼顾成本与续航要求。
- 飞控系统选型与优化:飞行控制系统是固定翼飞行器实现自主飞行的核心大脑,负责姿态稳定、航线跟踪等关键任务。先进的飞控系统集成了高精度的陀螺仪、加速度计、GPS 等传感器,运用先进的控制算法,如基于模型预测控制(MPC)或自适应控制的策略,实时监测并调整飞行器的飞行状态,确保在复杂气象条件、气流扰动下依然能够精准飞行。
二、四旋翼飞行器设计要点
- 机架结构与布局:四旋翼飞行器机架多采用轻质高强度材料,如碳纤维,以减轻自重并保证结构强度。其典型的十字形或 X 形布局,使得四个旋翼均匀分布,便于通过控制不同旋翼的转速来实现各种飞行姿态,具有良好的机动性与灵活性。机架的尺寸设计也需与搭载的设备、预期飞行性能相匹配,例如用于室内精细拍摄的小型四旋翼,机架紧凑小巧;而户外长距离巡检的大型四旋翼,则需更大的承载面积。
- 动力与传动系统:每个旋翼由独立的电机驱动,电机的选型依据飞行器的载重、飞行速度等需求而定,通常选用无刷直流电机,搭配合适的螺旋桨尺寸与螺距,确保产生足够的升力。由于四旋翼的动力传输简单直接,无需复杂的机械传动机构,降低了故障风险,提高了可靠性,但对电机的同步协调性要求极高,稍有偏差就可能导致飞行姿态失衡。
- 飞控与感知系统:四旋翼飞控系统同样依赖多种传感器,除基本的陀螺仪、加速度计外,还常配备视觉传感器、超声波传感器等,用于近距离的避障与姿态辅助修正。飞控算法多基于 PID(比例 - 积分 - 微分)控制或其衍生算法,快速精准地响应飞行状态变化,如在航拍时,面对突然的气流,飞控系统能迅速调整旋翼转速,维持相机稳定拍摄。
三、固定翼飞行器控制原理
- 姿态控制:通过控制副翼、升降舵、方向舵的偏转角度,改变机翼、尾翼上的空气动力分布,从而实现俯仰、横滚、偏航等姿态调整。例如,当需要抬头时,升降舵上偏,增加机尾向下的压力,使机头向上抬起;在转弯时,方向舵配合副翼动作,实现协调转弯,保持飞行稳定。
- 航线控制:基于 GPS 定位与预设的航线信息,飞控系统实时计算飞行器当前位置与目标航线的偏差,通过调整姿态角,引导飞行器沿着预定航线飞行。若发现偏离航线左侧,飞控系统将控制副翼使飞行器向右横滚一定角度,逐步回归航线,同时结合速度、高度等参数综合调控。
四、四旋翼飞行器控制原理
- 姿态控制:依靠改变四个旋翼的转速来调控姿态。欲使四旋翼前倾,增加前侧两个旋翼转速,同时降低后侧旋翼转速,利用旋翼转速差产生的扭矩促使机体前倾;同理,调整左右、上下旋翼转速可实现横滚、升降姿态变化,进而完成复杂的飞行动作。
- 位置控制:利用定位系统反馈的位置信息,结合目标位置,通过姿态控制作为中间手段,间接实现位置移动。例如要向前移动,先控制姿态前倾,产生向前的分力推动飞行器前进,过程中持续根据位置偏差调整姿态与旋翼转速,确保精准到达目标位置。
五、面临的挑战与发展趋势
- 挑战:环境适应性:无论是固定翼还是四旋翼飞行器,在复杂环境下飞行都面临诸多难题。如在山区,固定翼要应对多变的气流、山谷风,四旋翼要克服地形遮挡导致的定位信号丢失、障碍物增多等问题,对飞控系统的鲁棒性提出极高要求。能源续航:目前,电池技术限制了四旋翼飞行器的续航里程与载重能力;固定翼虽有燃油发动机可选,但长航时飞行仍需频繁加油,制约了远程任务执行效率,寻找更高效的能源解决方案迫在眉睫。多机协同:在大规模应用场景,如集群作战、多机编队测绘,飞行器间的协同控制面临通信干扰、碰撞避免、任务分配等复杂问题,协调难度大。
- 发展趋势:
- 智能化:引入人工智能技术,如强化学习、深度学习,让飞行器能够自主学习复杂环境下的最佳飞行策略,提高应对突发情况的能力,实现真正的智能自主飞行。
- 复合式设计:结合固定翼与四旋翼的优势,开发新型复合式飞行器,如垂直起降固定翼无人机,兼具固定翼的长航时、高速巡航特性与四旋翼的垂直起降、低空悬停灵活性,拓展应用领域。
- 绿色节能:随着新能源技术发展,探索太阳能、氢能等绿色能源在飞行器中的应用,减少对传统能源的依赖,降低运行成本,助力可持续发展。
📚2 运行结果
主函数部分代码:
clear;clc
%------Gravity------
g=9.81;
%Mass Properties
mass=4;
Ix =0.6465;
Iy =0.3048;
Iz =0.9359;
Ixz=0.0006584;
%-----------Trim Conditions-------------%
Phi0=0; %in rad
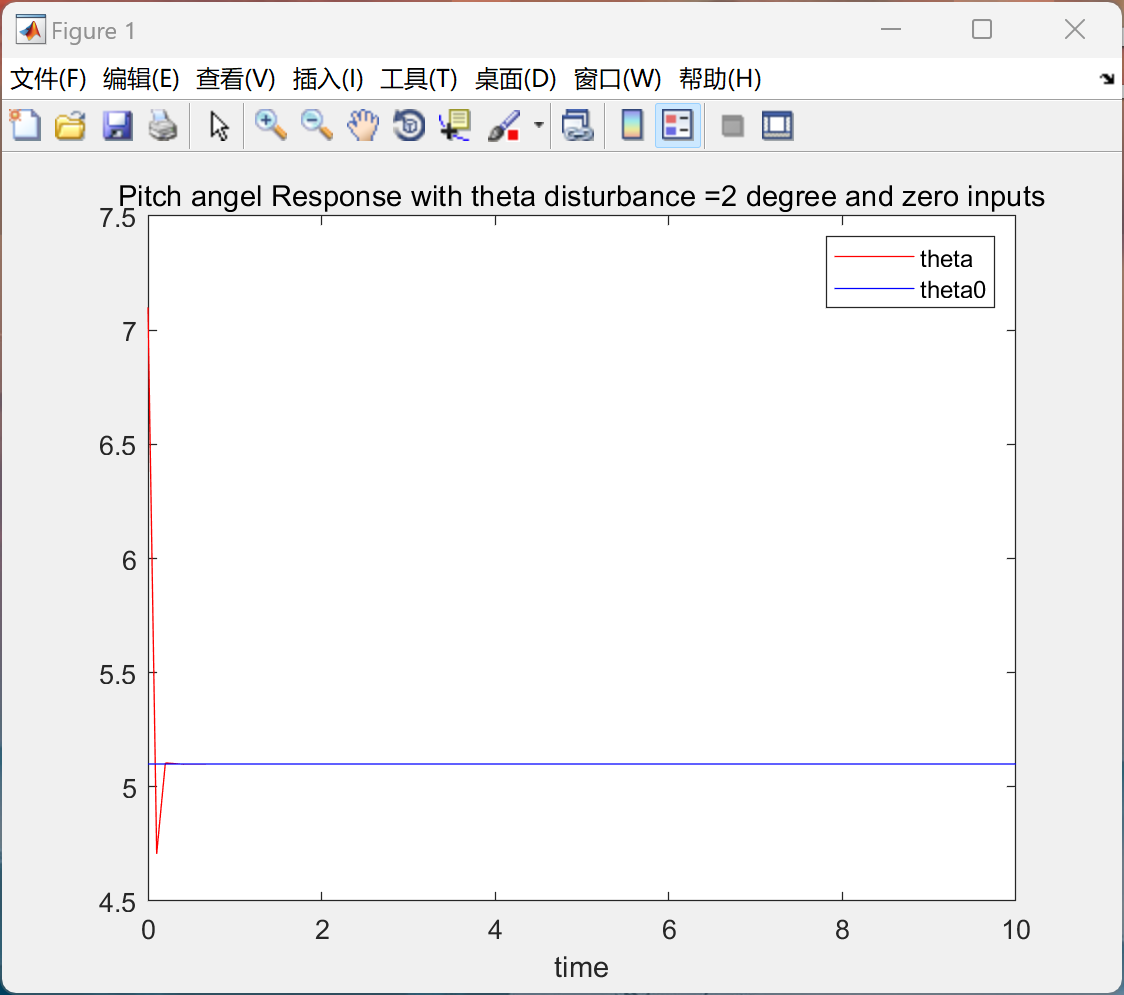
Theta0=5.1*pi/180; %in rad
Epsi0=0; %in rad
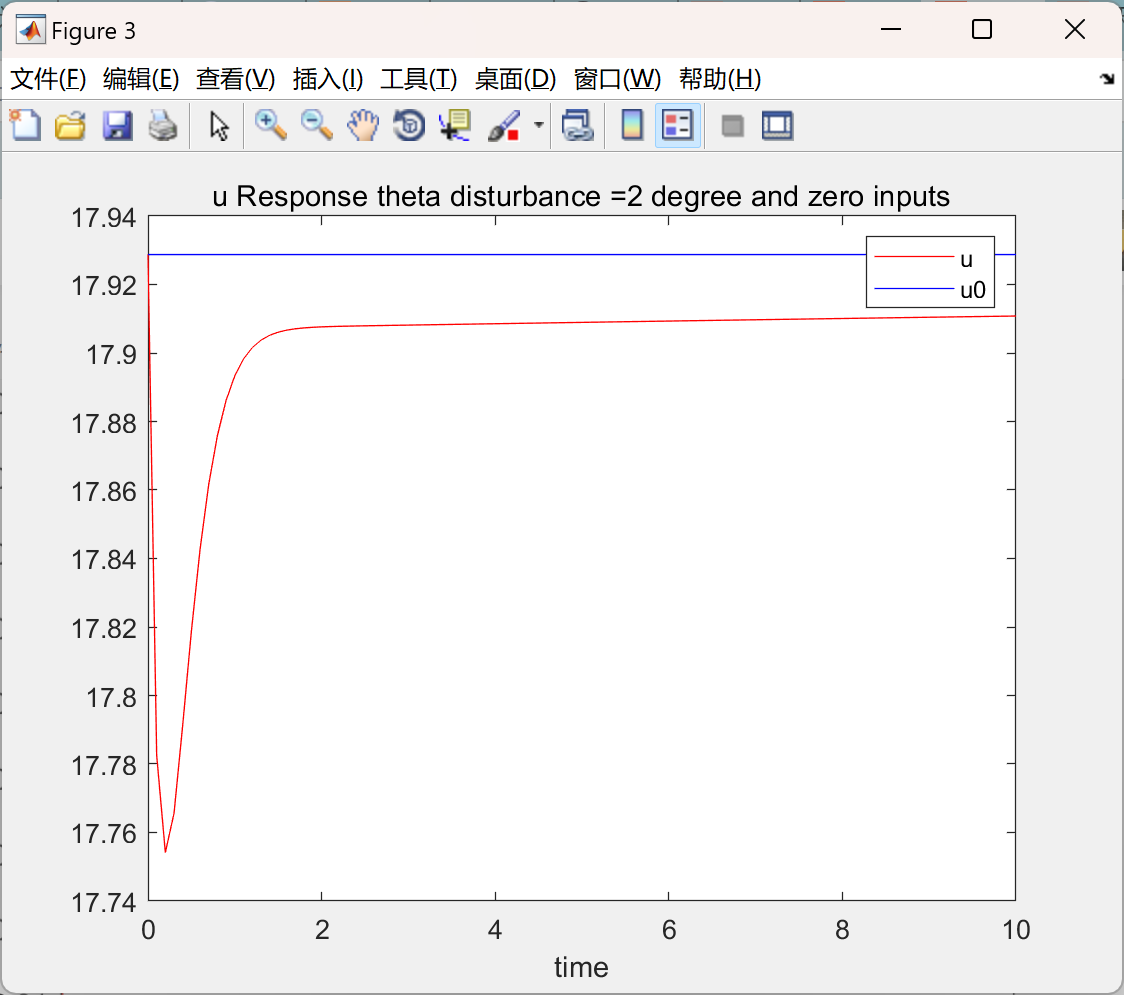
V0=18; %resultant
u0=sqrt(V0^2/(1+(tan(Theta0))^2));
v0=0;
w0=u0*tan(Theta0);
p0=0;
q0=0;
r0=0;
d_elevator0=-0.6319*pi/180;
d_Thrust0=5; %0.8749; % 0.8749
d_rudder0=0;
d_aileron0=0;
w_d0=0;
X0=mass*g*sin(Theta0);
Y0=-mass*g*cos(Theta0)*sin(Phi0);
Z0=-mass*g*cos(Theta0)*cos(Phi0);
%-----------Initial Conditions-------------
Phi_initial=Phi0;%+(2*pi/180);
Theta_initial=Theta0+(2*pi/180);
Epsi_initial=Epsi0;%+(2*pi/180);
u_initial=u0;
v_initial=v0;
w_initial=w0;
p_initial=0;
q_initial=0;
r_initial=0;
d_elevatori=d_elevator0;
%initial_position
Xe0=0;
Ye0=0;
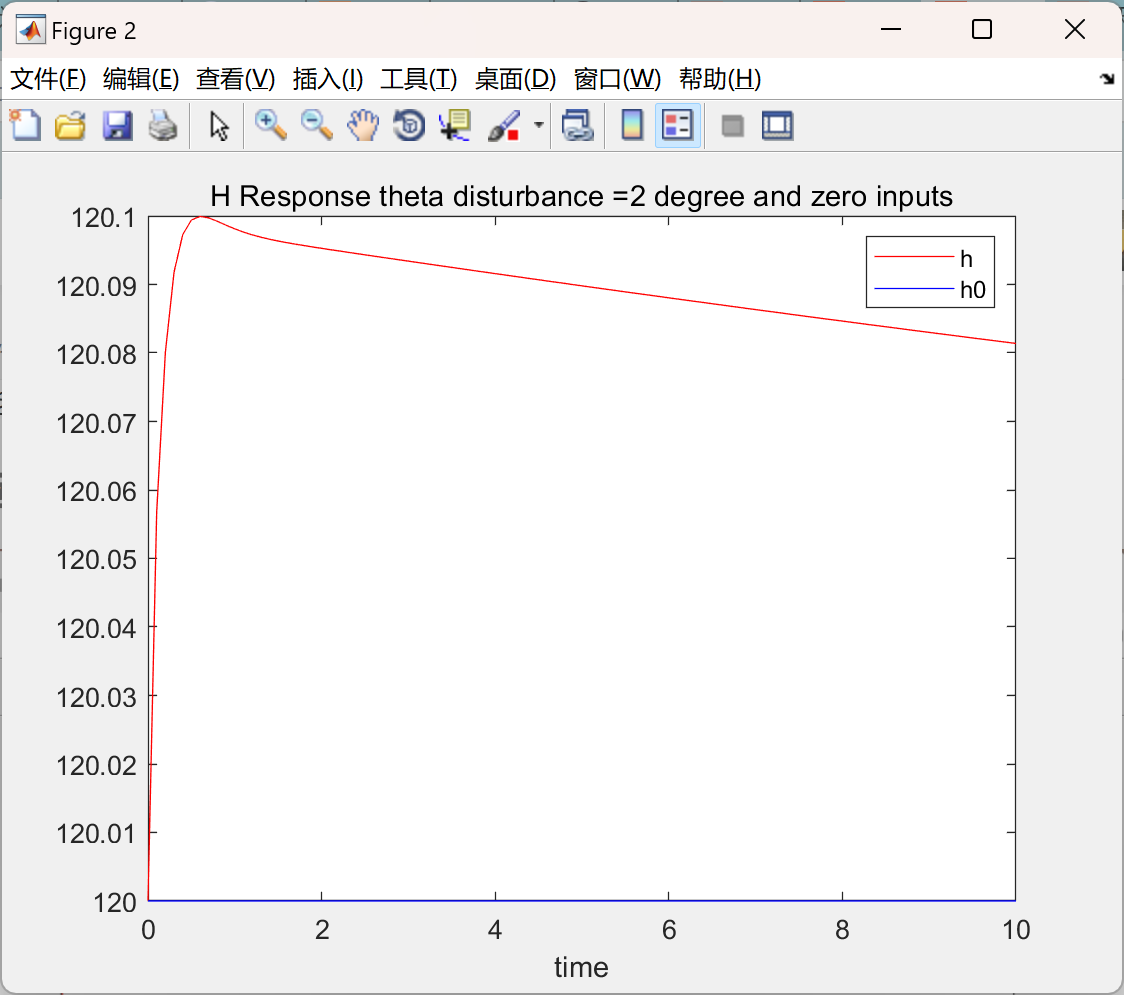
Ze0=120;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% inital value, edit this
Hi=120; %%%%%%fixed desired value
%Airplane Properties
S=0.471; %Wing Area
b=1.7; %Wing Span
c=0.28; %Mean Wing Chord
%Stability derivatives
%---------------- X force--------------------
CX0=-0.0094304;
CXu=-(0.158*0)-0.0094304;
CX_alpha=(0.42565-0.21544);
CXe=0;
CXt=1;
%---------------- Y force--------------------
CYB=-0.16533;
CYp=-0.00068802; %sign change
CYr=0.15502; %sign Charge
CY_aileron=0.023693;
CY_rudder=-0.10317; %sign Change12 %%%%%%%whyyyyy
%---------------- Z force--------------------
CZ0=-0.42565;
CZu=-((0.052968^2)/(1-(0.052968)^2))*0.42565;
CZ_alpha=-(4.8375+0.0094304);
CZ_alpha_dot=1.3359; %lt/c=2.5
CZq=-7.3583; %-(-9.96/2.5)*2*u0/c;
CZe=-0.56118;
CZt=0;
%---------------- L Moment--------------------
CLb=0.029196; %signChange2
CLp=-0.44965;
CLr=0.0067709;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]吴冬梅.四旋翼飞行器最优控制实验教学设计[J].宁波工程学院学报,2024,36(04):122-129.
[2]杨晓燕,黄宇森,王衍凤,等.新型矢量推力八旋翼飞行器的设计与控制[J].传感器与微系统,2024,43(11):68-72.DOI:10.13873/J.1000-9787(2024)11-0068-05.
🌈4 Matlab代码实现


















 788
788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









