









今天在看一个无人驾驶的ROS项目
感知主要操作:分类,分割,检测,跟踪
从项目代码中了解到了许多无人驾驶方面的算法逻辑思想(这是我目前看到的,如有遗漏或错误还望指正)
1.坐标转换
无人驾驶的汽车一般通过雷达、摄像头或两者同时运用来识别障碍物。这里就以雷达为例,无人车上拥有各种各样的传感器,每个传感器的安装位置和角度又不尽相同。对于传感器的提供商,开始并不知道传感器会以什么角度,安装在什么位置,因此只能根据传感器自身建立坐标系。传感器自身坐标系并不是全车的车身坐标系,无人驾驶系统是一个多传感器整合的系统,需要将不同位置的传感器数据统一到一个固定的坐标系——自车坐标系下。
所以要通过坐标转换统一到人为规定的坐标系中
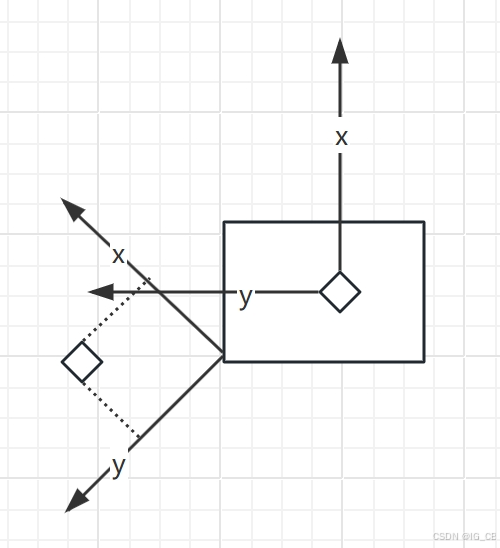
通过平移,旋转操作将雷达坐标转换成车自身坐标。
平移:
平移步骤根据传感器安装位置和自车后轴的距离进行计算,仅仅是XYZ三个方向加减运算。
旋转:
绕轴旋转需要引入角度,不是简单的加减运算,两个坐标存在角度,也得需要带上角度
这只是大致的思想具体的转换思想运用到了欧拉转换,详细见下面网址
无人驾驶技术入门(十二)| 无人驾驶中的坐标转换 - 知乎 (zhihu.com)
2.体素滤波
下面是我看项目的代码:
体素滤波的思想就是让点云数据点变少且扫描的图形不能改变
// 降采样 体素滤波 让点云变少且图形不变
void voxelFilter(const pcl::PointCloud<PointType>::Ptr input,
pcl::PointCloud<PointType>::Ptr &output)
{
auto startTimePassThrough = std::chrono::steady_clock::now();
pcl::VoxelGrid<PointType> sor;
sor.setInputCloud(input);
sor.setLeafSize(0.05f, 0.05f, 0.05f); //设置体素大小 // 剪枝?
sor.filter(*output); //执行滤波
auto endTimePassThrough = std::chrono::steady_clock::now();
auto elapsedTimePassThrough = std::chrono::duration_cast<std::chrono::microseconds>(endTimePassThrough - startTimePassThrough); //结束时间记录与耗时计算
// std::cout << "VoxelGridFiltering took " << elapsedTimePassThrough.count() << " milliseconds" << std::endl;
return;
}3.地面分割
地面分割采用RANSAC算法
具体的代码如下:
#include <utility.h>
#include <set>
bool point_cmp(PointType a, PointType b) // PointType表明XYZ点云库的一个点坐标
{
return a.z < b.z;
}
// 地面分割采用RANSAC算法
void lidar_cluster::RANSAC(const pcl::PointCloud<PointType>::Ptr &cloud_filtered,
pcl::PointCloud<PointType>::Ptr &cloud_filtered_out, int maxIterations, float thre)
{
pcl::SACSegmentation<PointType> seg;
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
pcl::PointCloud<PointType>::Ptr cloud_plane(new pcl::PointCloud<PointType>());
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC); /
seg.setMaxIterations(maxIterations);
seg.setDistanceThreshold(thre);
// 从剩余的点云中分割最大平面组成部分
seg.setInputCloud(cloud_filtered);
seg.segment(*inliers, *coefficients);
// Extract the planar inliers from the input cloud 从输入云中提取平面内层
pcl::ExtractIndices<PointType> extract;
extract.setInputCloud(cloud_filtered);
extract.setIndices(inliers);
extract.setNegative(false);
extract.filter(*cloud_plane); // 设置完之后执行filter才能实现
std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size() << " data points." << std::endl;
extract.setNegative(true);
extract.filter(*cloud_filtered_out);
}
void lidar_cluster::ground_segmentation(const pcl::PointCloud<PointType>::Ptr &in_pc,
pcl::PointCloud<PointType>::Ptr &g_not_ground_pc)
{
g_not_ground_pc->points.clear();
pcl::PointCloud<PointType> laserCloudIn, laserCloudIn_org;
laserCloudIn = laserCloudIn_org = *in_pc;
PointType point;
g_all_pc = laserCloudIn.makeShared();
sort(laserCloudIn.points.begin(), laserCloudIn.end(), point_cmp);
pcl::PointCloud<PointType>::iterator it = laserCloudIn.points.begin();
for (int i = 0; i < laserCloudIn.points.size(); i++)
{
if (laserCloudIn.points[i].z < -1 * sensor_height_) // 0.25
{
it++;
}
else
{
break;
}
}
// remove below sensor_height_* - 1.5 points 拆下传感器下方的重量_*-1.5分
laserCloudIn.points.erase(laserCloudIn.points.begin(), it);
// 4. Extract init ground seeds. 提取初始地面种子
extract_initial_seeds_(laserCloudIn); // 这个可能压根都没用上 数据都被清空了 不对 estimate_plane_用上了
g_ground_pc = g_seeds_pc; // 获取的地面种子存放到地面里面
for (int i = 0; i < num_iter_; i++)
{
estimate_plane_();
g_ground_pc->clear();
g_not_ground_pc->clear();
MatrixXf points(laserCloudIn_org.points.size(), 3);
int j = 0;
for (auto p : laserCloudIn_org.points)
{
points.row(j++) << p.x, p.y, p.z;
}
VectorXf result = points * normal_; // 平面的法线
for (int r = 0; r < result.rows(); r++)
{
if (result[r] < th_dist_d_)
{
g_ground_pc->points.push_back(laserCloudIn_org[r]);
}
else
{
g_not_ground_pc->points.push_back(laserCloudIn_org[r]);
}
}
}
g_all_pc->clear();
}
void lidar_cluster::extract_initial_seeds_(const pcl::PointCloud<PointType> &p_sorted)
{
double sum = 0;
int cnt = 0;
for (int i = 0; i < p_sorted.points.size() && cnt < num_lpr_; i++)
{
sum += p_sorted.points[i].z;
cnt++;
}
double lpr_height = cnt != 0 ? sum / cnt : 0;
g_seeds_pc->clear();
for (int i = 0; i < p_sorted.points.size(); i++)
{
if (p_sorted.points[i].z < lpr_height + th_seeds_)
{
g_seeds_pc->points.push_back(p_sorted.points[i]);
}
}
}
void lidar_cluster::estimate_plane_(void)
{
Eigen::Matrix3f cov;
Eigen::Vector4f pc_mean;
pcl::computeMeanAndCovarianceMatrix(*g_ground_pc, cov, pc_mean);
JacobiSVD<MatrixXf> svd(cov, Eigen::DecompositionOptions::ComputeFullU);
normal_ = (svd.matrixU().col(2));
Eigen::Vector3f seeds_mean = pc_mean.head<3>();
d_ = -(normal_.transpose() * seeds_mean)(0, 0);
th_dist_d_ = th_dist_ - d_;
}
其实有一些现在还没弄得太懂,弄懂了再说。(我发的东西只是我最近的领悟,类似于日常的总结,没多大帮助的话,还请见谅,谢谢!!!)

















 1676
1676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









