






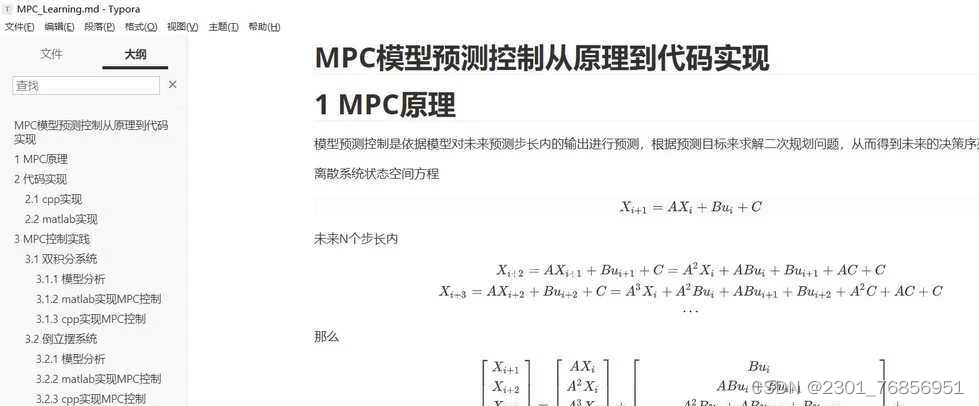
mpc模型预测控制从原理到代码实现
mpc模型预测控制详细原理推导
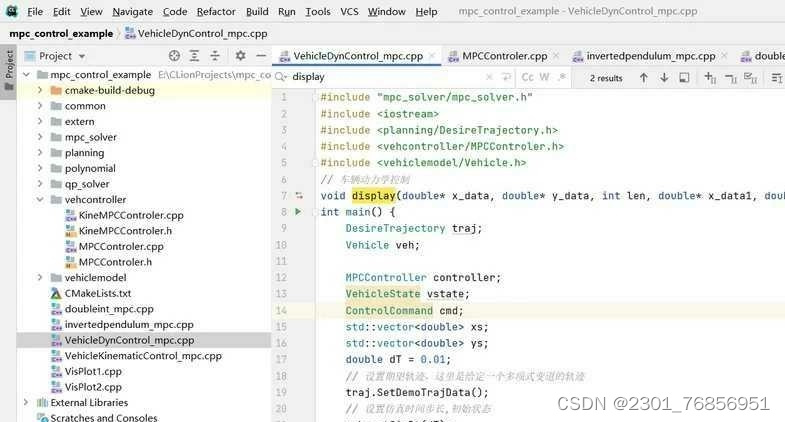
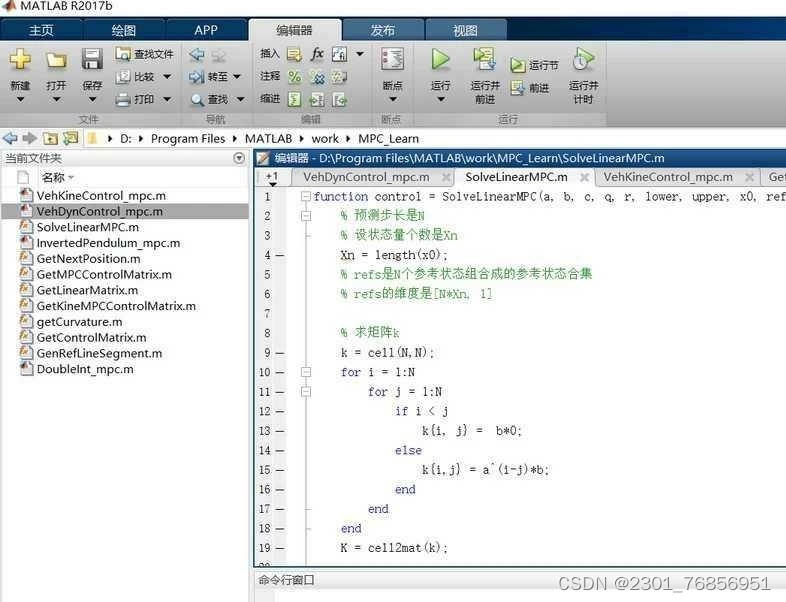
matlab和c++两种编程实现
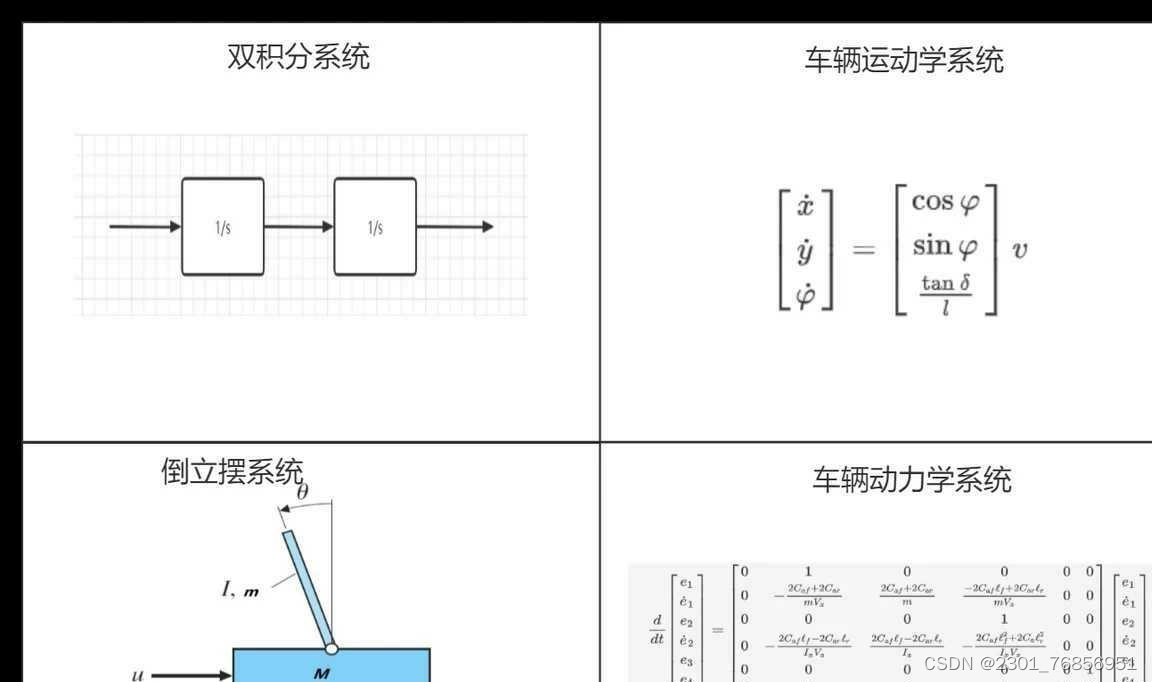
四个实际控制工程案例:
双积分控制系统
倒立摆控制系统
车辆运动学跟踪控制系统
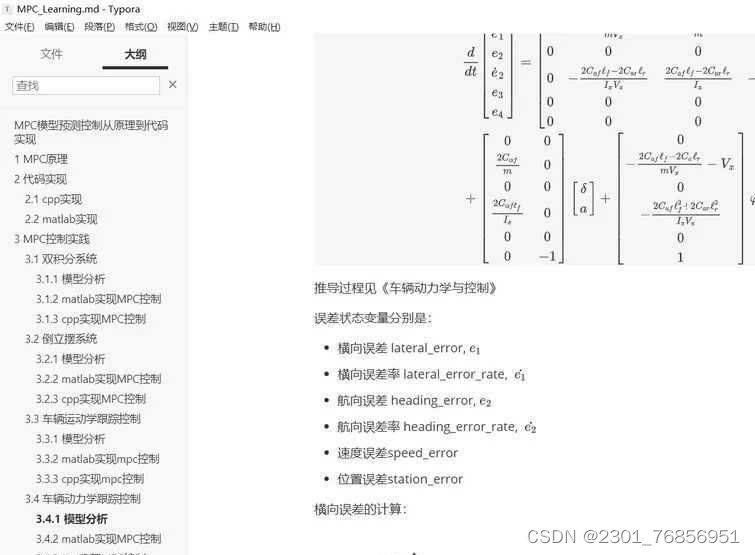
车辆动力学跟踪控制系统
包含上述所有的文档和代码。
YID:5645660767932239
mpc模型预测控制从原理到代码实现
mpc模型预测控制详细原理推导
matlab和c++两种编程实现
四个实际控制工程案例:
双积分控制系统
倒立摆控制系统
车辆运动学跟踪控制系统
车辆动力学跟踪控制系统
包含上述所有的文档和代码。
YID:5645660767932239
 1272
981
1272
981











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























