






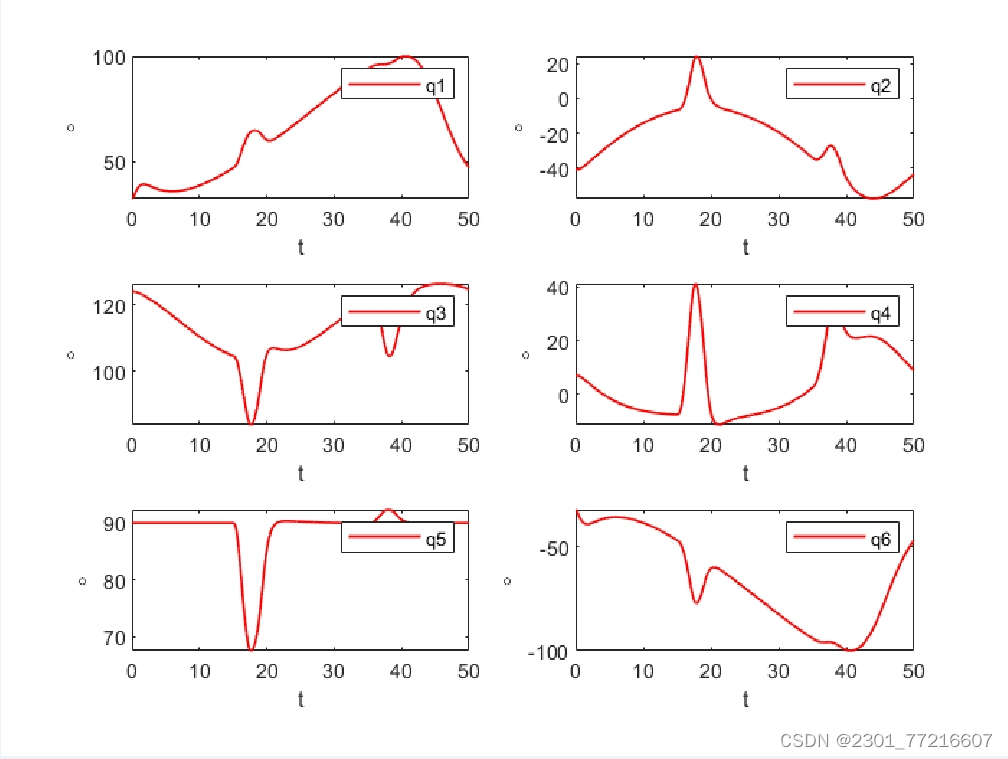
基于模型的六轴机器人阻抗力控制算法(matlab simscape,机器人模型可换),视频中红色为期望轨迹,黑色为实际轨迹,工程可一键运行,可学到机器人阻抗力控制算法以及通过m文件设置simulink参数及调用simulink的方法。
ID:44349677866561118
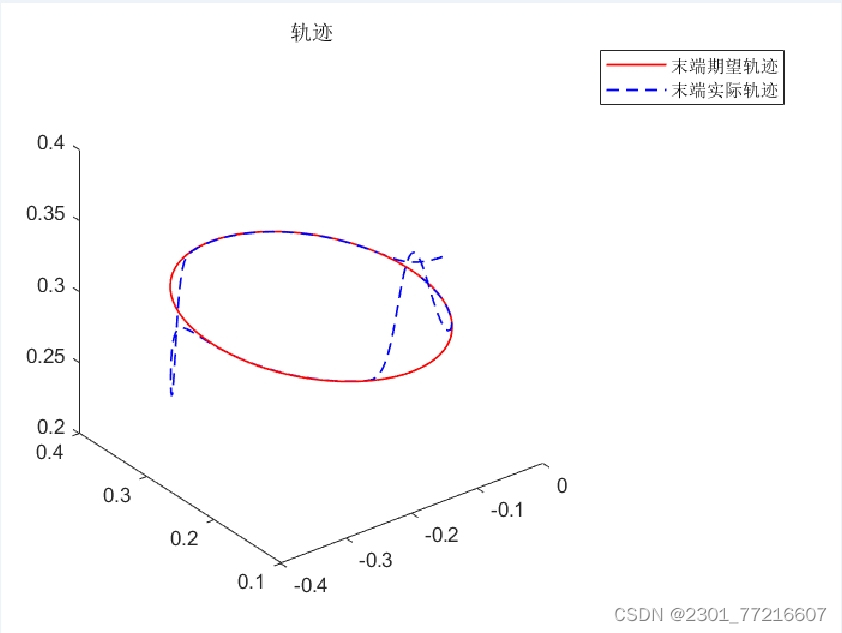
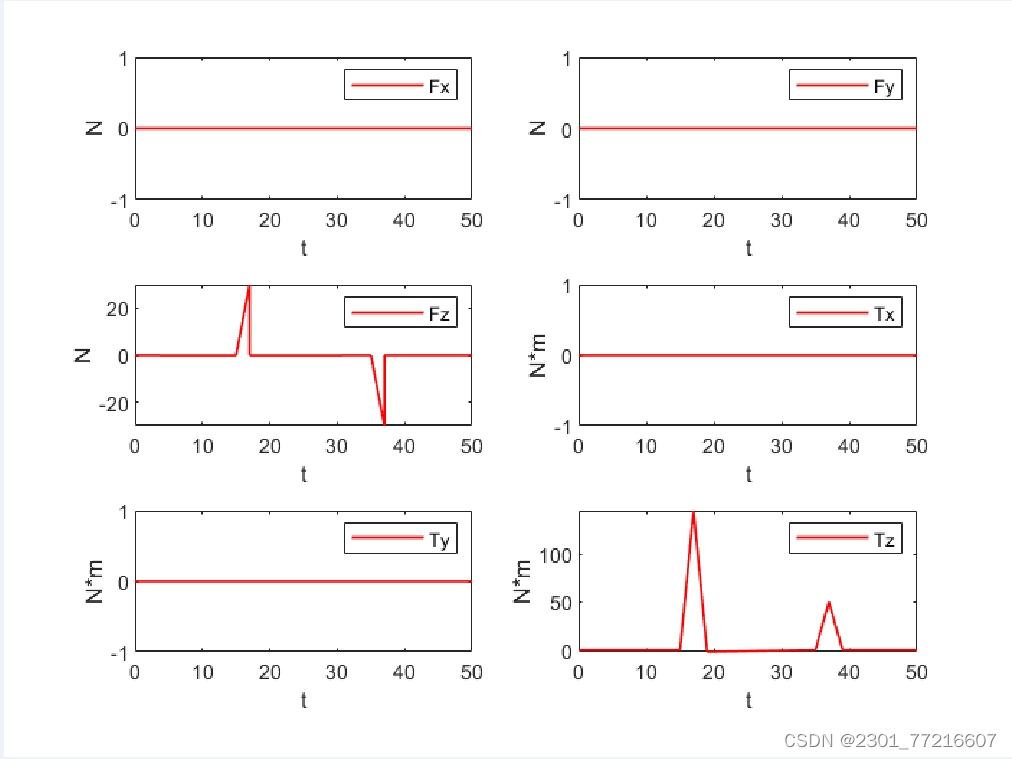
基于模型的六轴机器人阻抗力控制算法(matlab simscape,机器人模型可换),视频中红色为期望轨迹,黑色为实际轨迹,工程可一键运行,可学到机器人阻抗力控制算法以及通过m文件设置simulink参数及调用simulink的方法。
ID:44349677866561118
 2099
2099











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























