






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
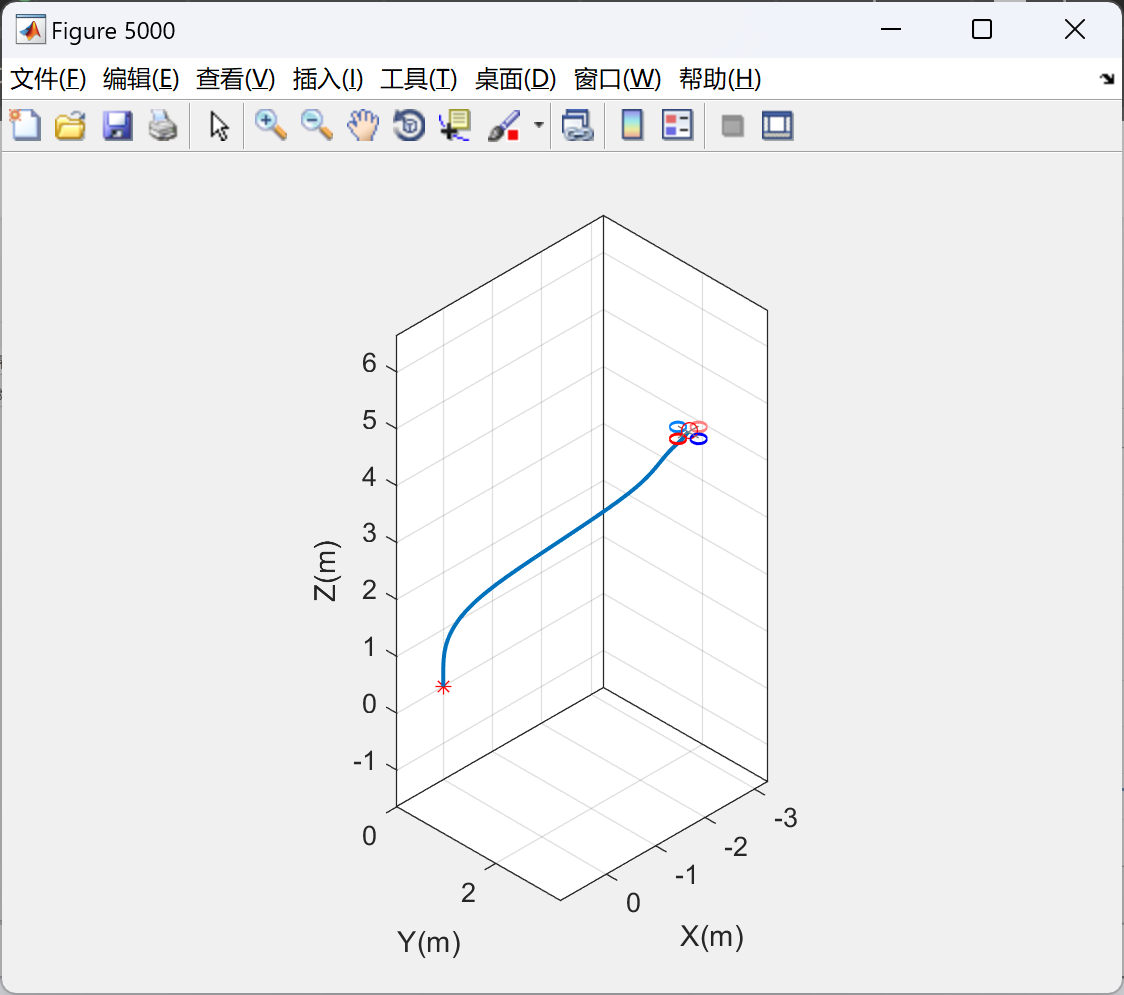
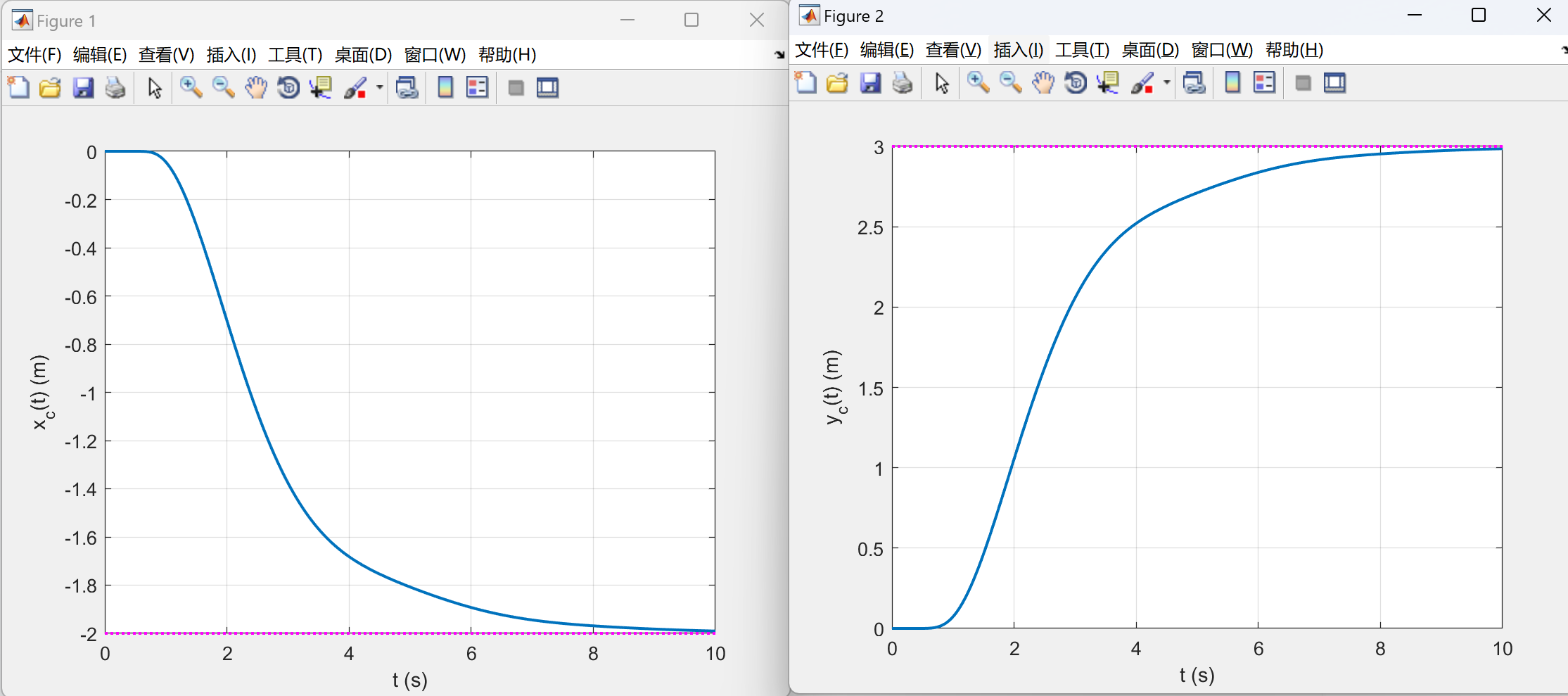
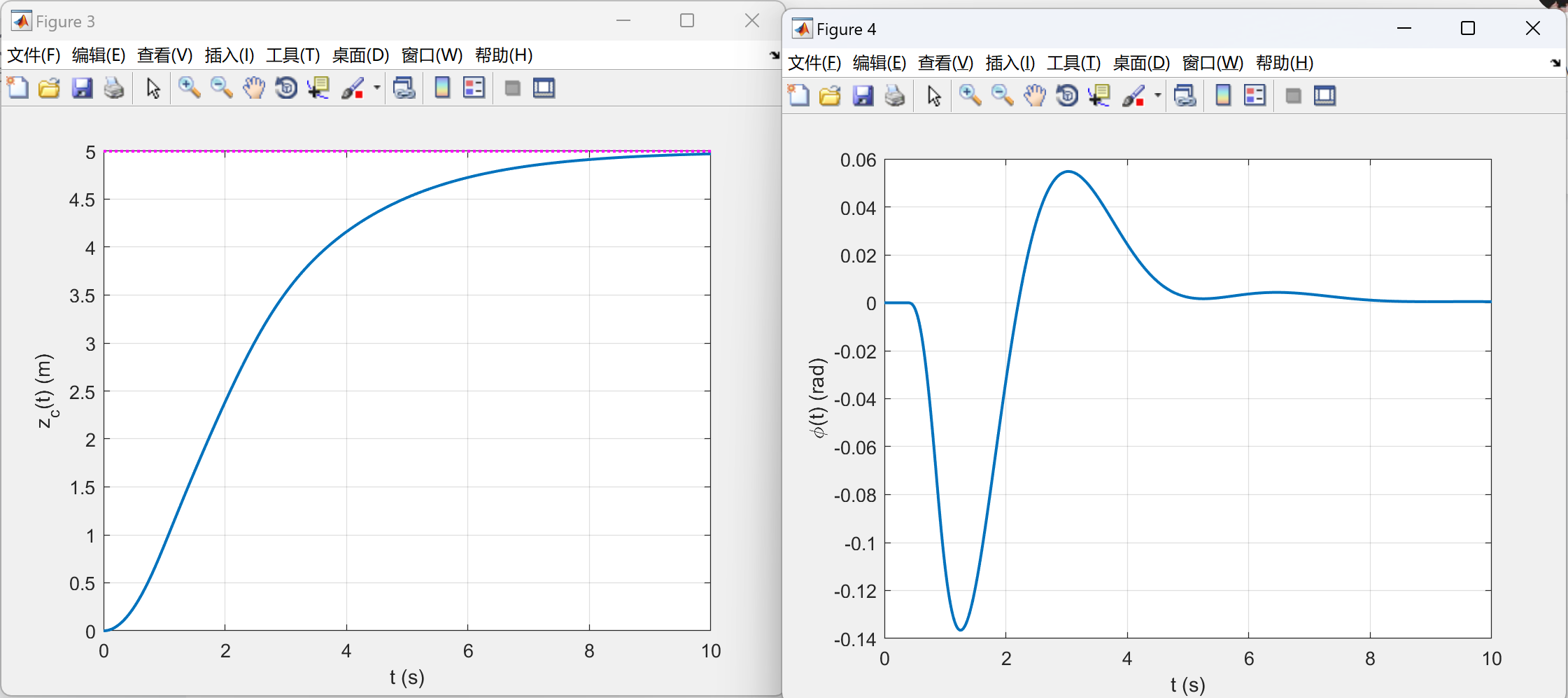
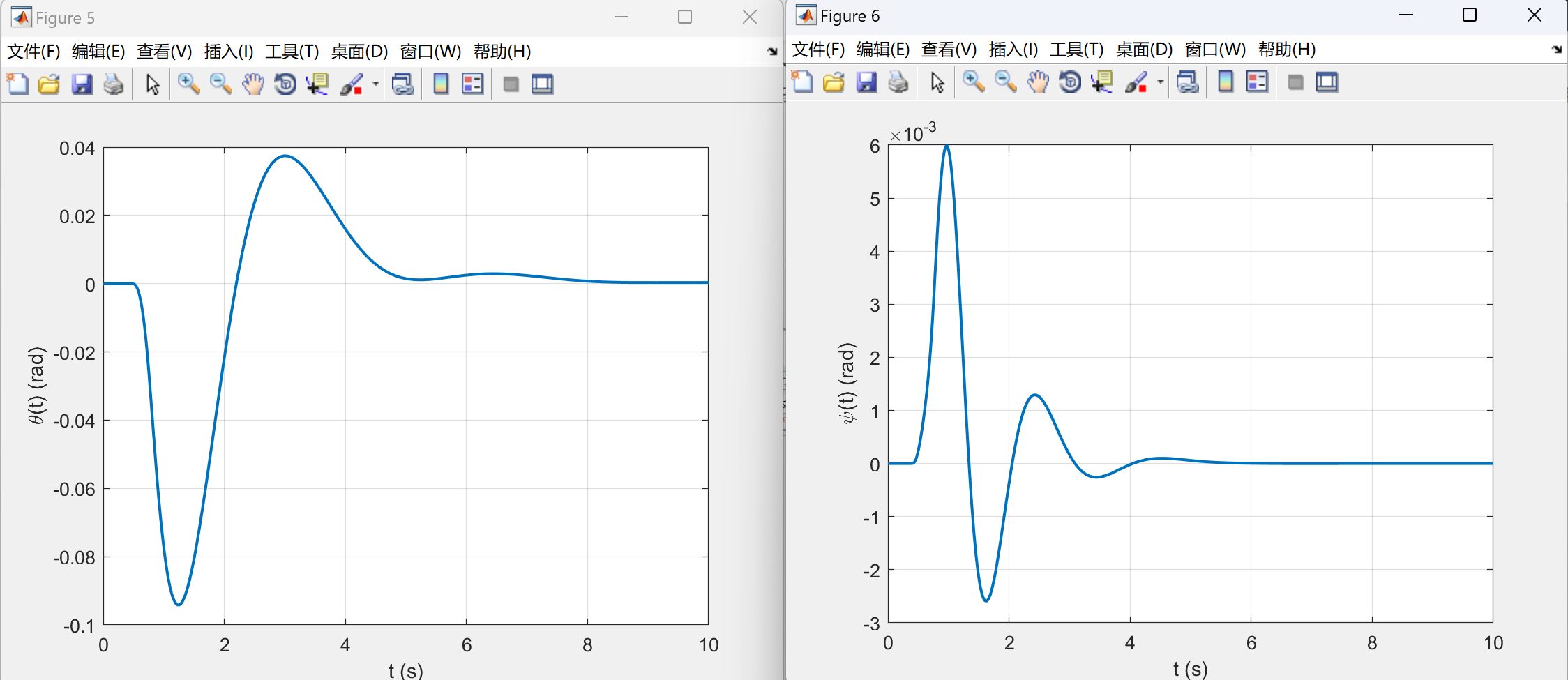
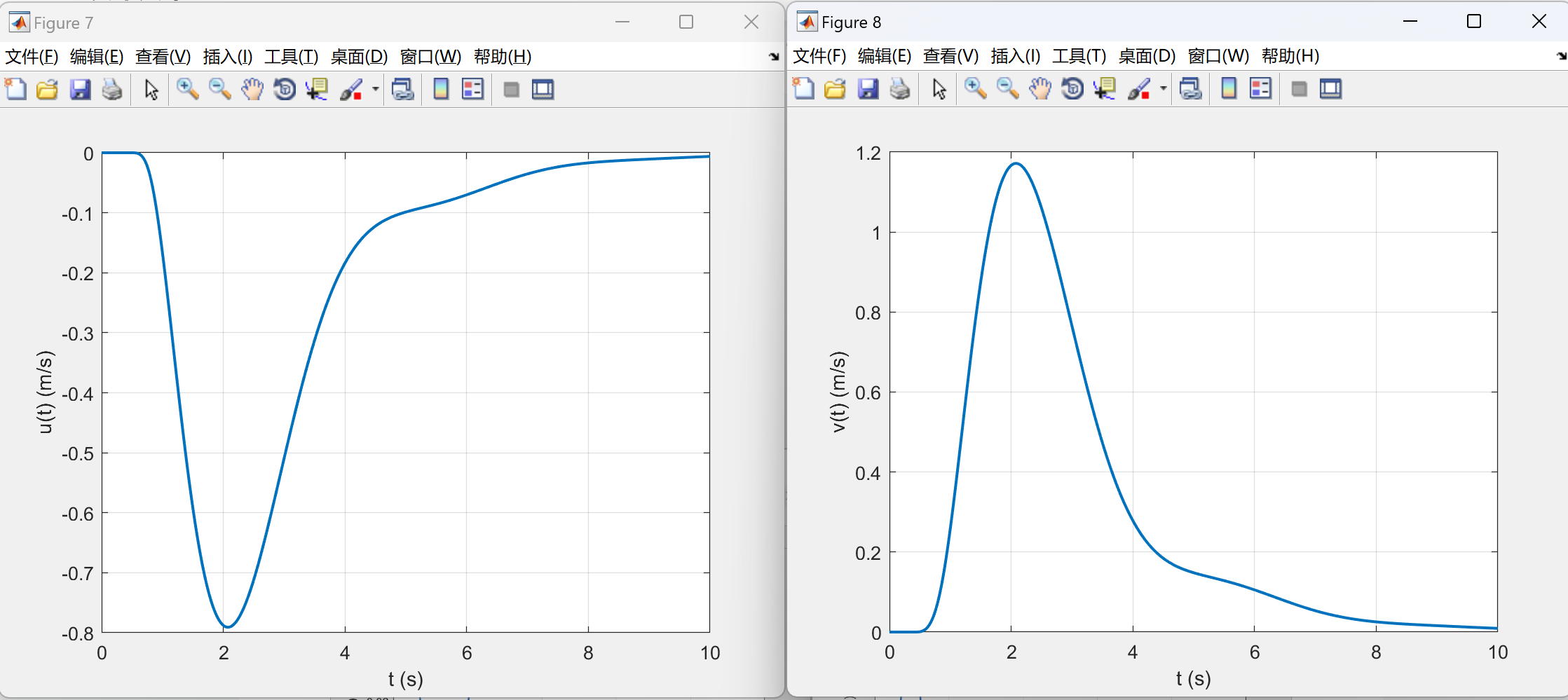
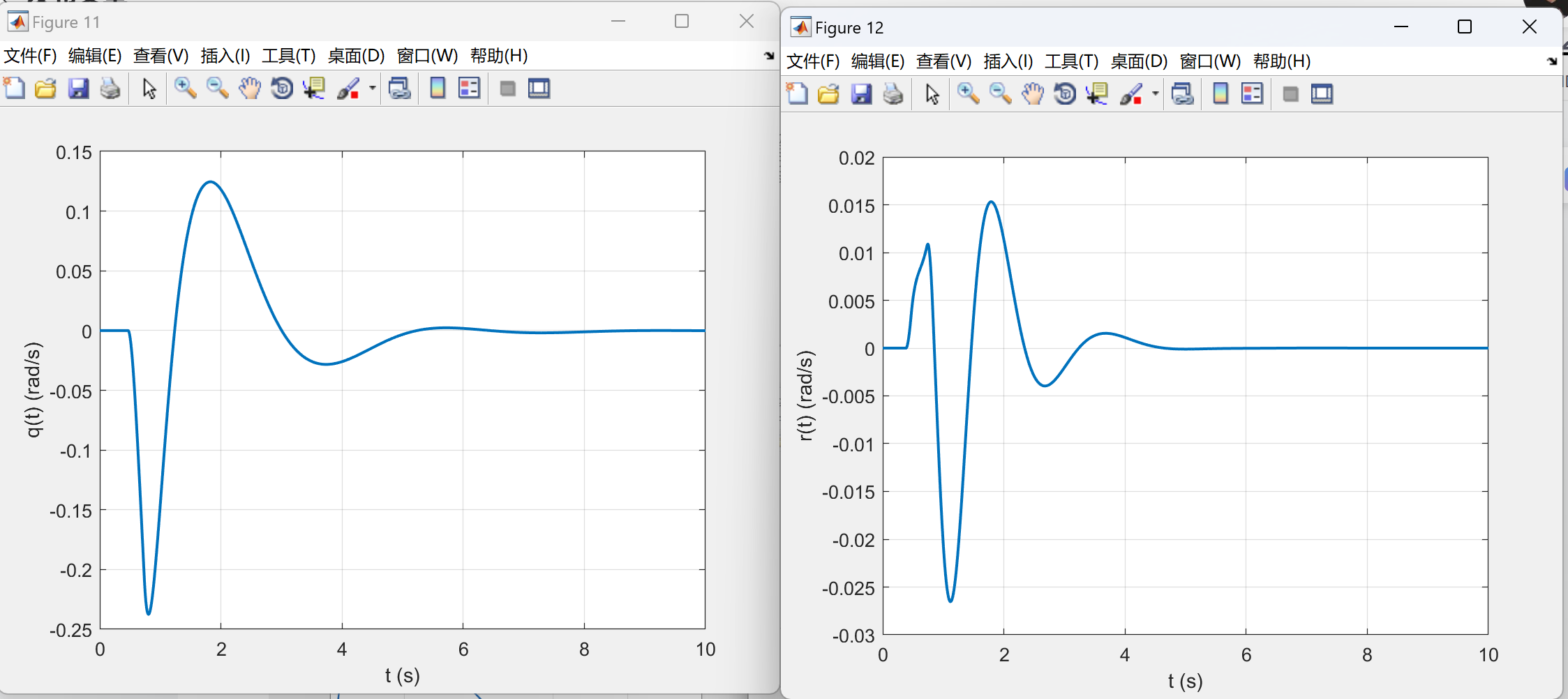
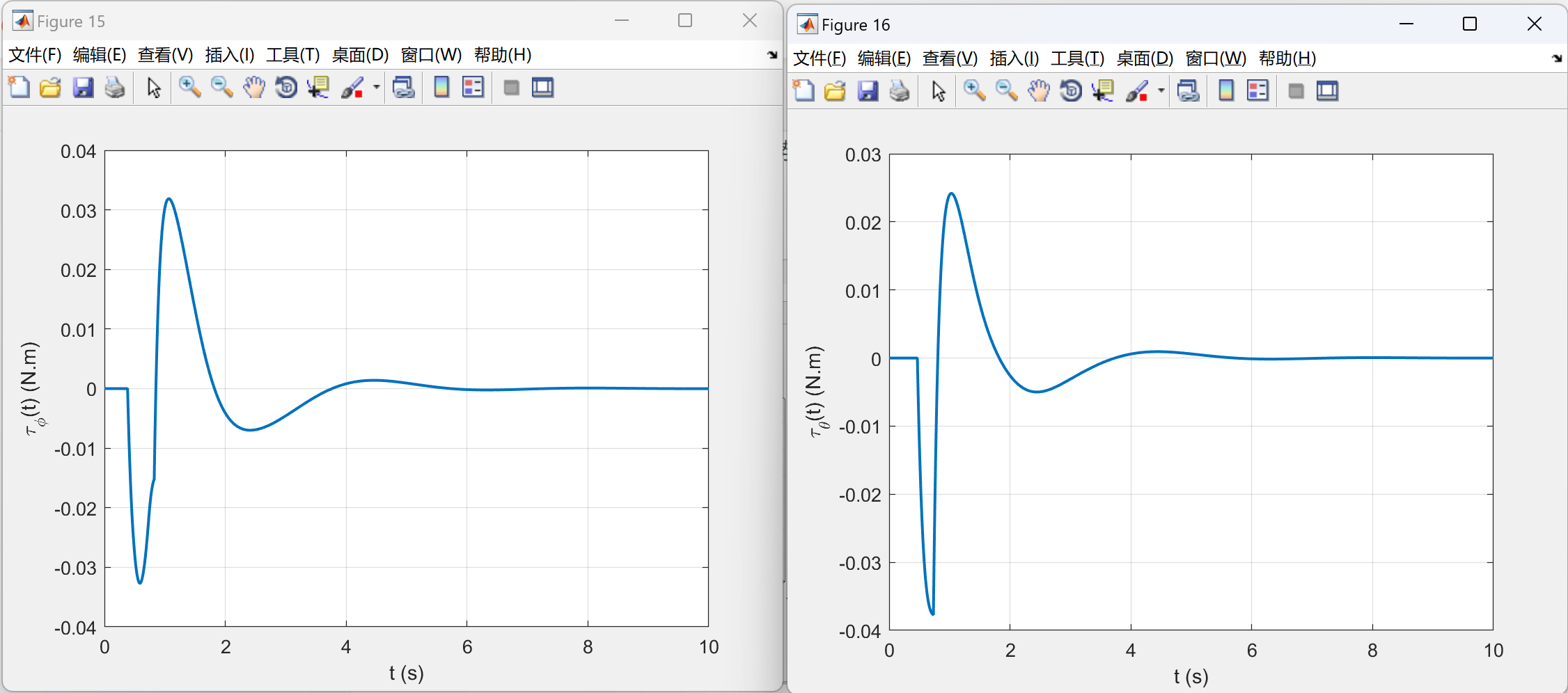
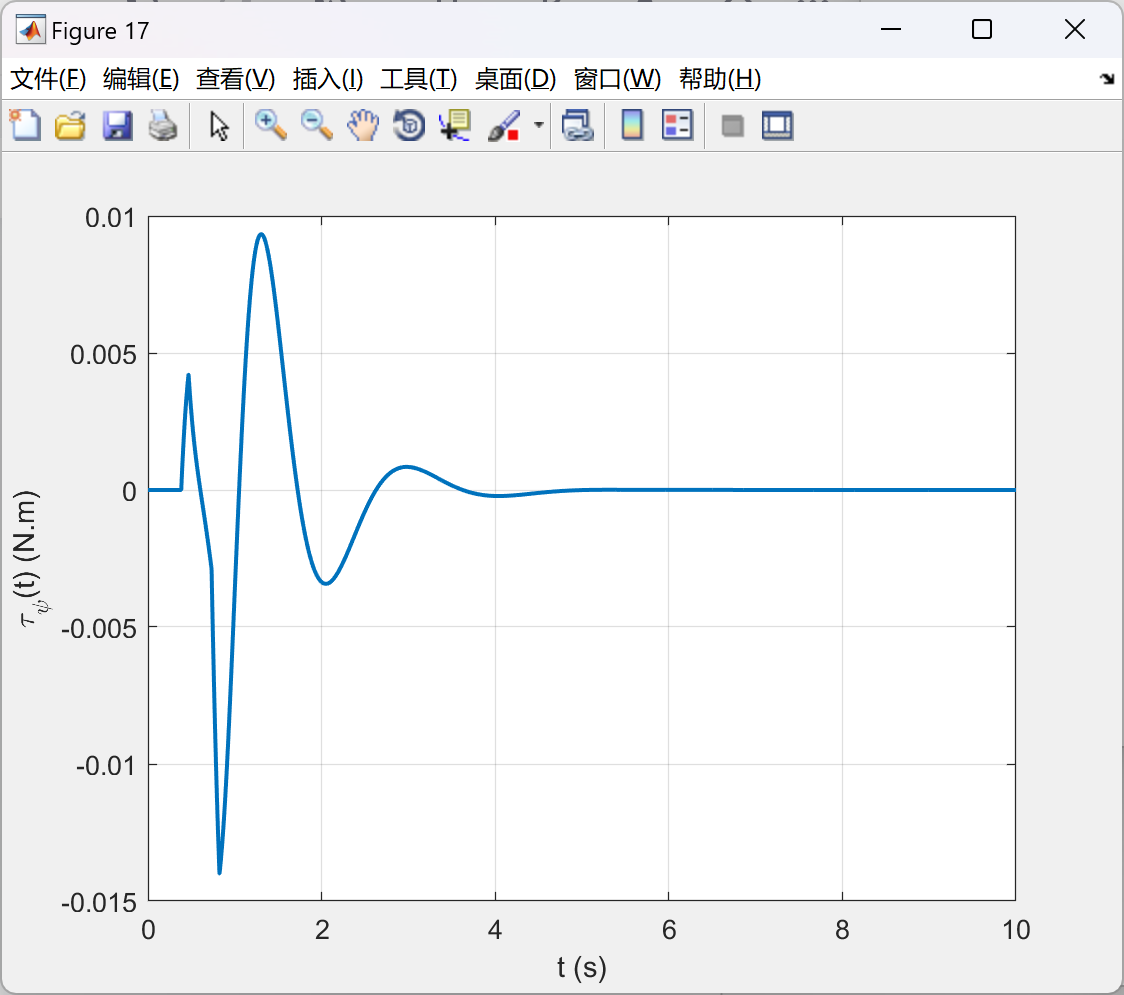
对架无人机进行规范控制和点对点运动的模拟,闭环系统的积分是使用有限差分法完成的。
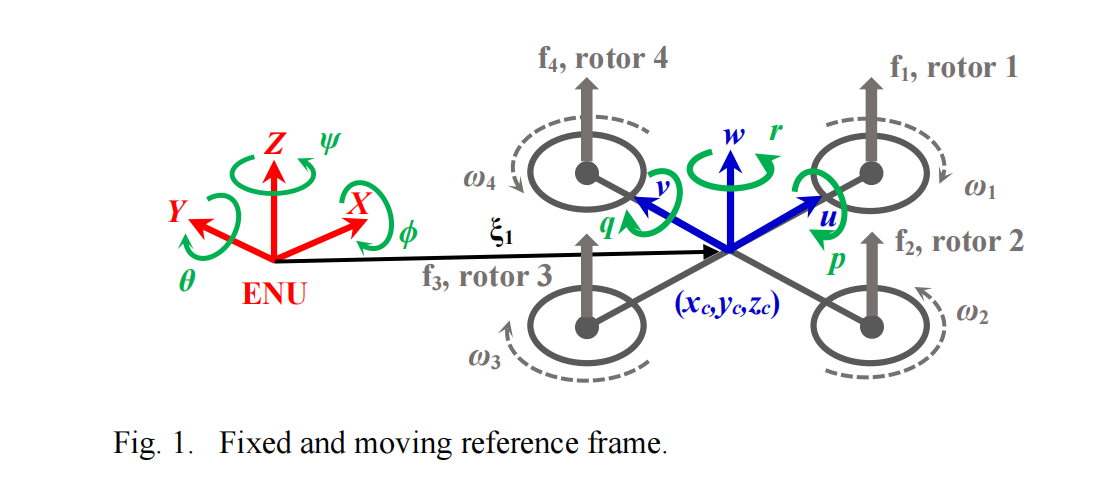
无人机的动力学以图形表示可以在参考文献第三部分找到:
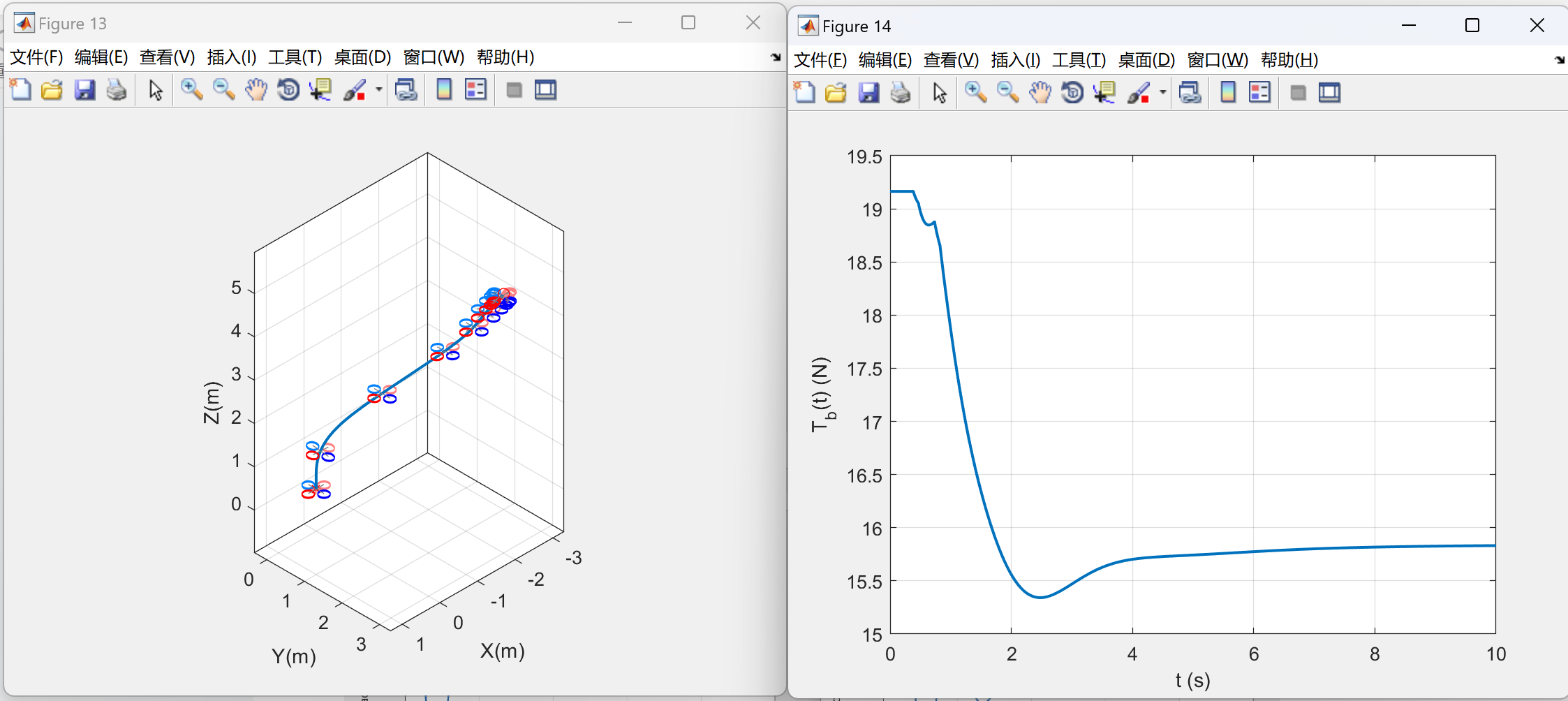
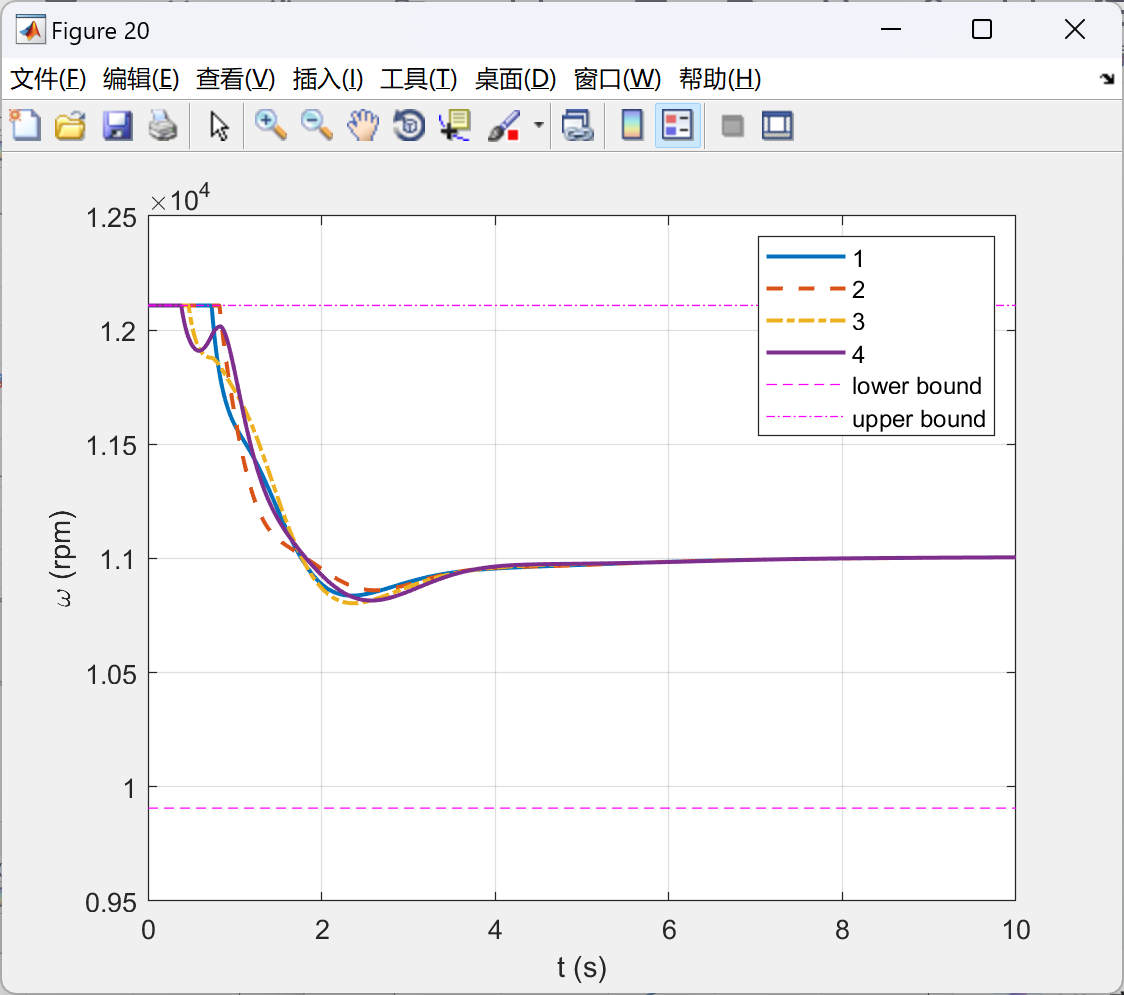
可变螺距螺旋桨四旋翼飞行器具有系统的力矩与旋翼动力推力因子之间的非线性代数关系。这种非线性关系使得推力分配成为整体控制设计中具有挑战性的课题。状态相关的Riccati方程(SDRE)被选为完全耦合的六自由度(DoF)模式下调节任务的控制器。常见的SDRE设计由于欠驱动而无法实现完全耦合的六自由度控制。虚拟约束被用于在级联设计中实现位置和方向控制。在SDRE结构中,提出了四种推力分配方法,以根据控制系统的输出结果计算推力因子。实际实施是生成这种分配的主要原因。利用均值定理使得可能找到一个可实施的推力因子形式化方法,因为它们可以被归类为非仿射系统。灵活而激进的机动是可变螺距螺旋桨四旋翼飞行器的应用之一;因此,研究了翻转机动以突出推力分配方法的优势。对四种方法进行分析和比较,以展示所提出结构的优缺点。
📚2 运行结果

部分代码:
% Time---------------------------------------------------------------------
tf=10;
N=999*tf;
Nt=tf/N;
t=0:tf/N:tf;
% Final condition----------------------------------------------------------
xi_1_des=[-2;3;5];
dxi_1_des=[0;0;0];
dxi_2_des=[0;0;0];
psi_des=0;
% Control parameters-------------------------------------------------------
KpT=eye(3);
KdT=2*eye(3);
KpO=eye(3);
KdO=0.5*eye(3);
% Parameters---------------------------------------------------------------
L=0.2098; % distance between motor and CoM of quadrotor (m)
R=0.239/2; % radius of propeller (m)
thickness=0.03; % thickness of rotating propeller (m)
Ixx=0.036; % kgm^2
Iyy=0.036; % kgm^2
Izz=0.061; % kgm^2
m_body=1.298; % kg
m_battery=0.3165; % kg
m=m_body+m_battery; % kg
g0=9.81; % m/s^2
D=diag([0.25,0.25,0.5]); % drag matrix kg/s
k=2.98*10^-6; % lift constant - thrust factor (Ns^2/rad^2)
d=1.14*10^-7; % drag constant (Nms^2/rad^2)
omega_0=sqrt(m*g0/k/4);
omega_max=1.1*omega_0; % rad/s
omega_min=0.9*omega_0; % rad/s
% Initial condition--------------------------------------------------------
xc_0=0;
yc_0=0;
zc_0=0;
phi_0=0;
theta_0=0;
psi_0=0;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









