






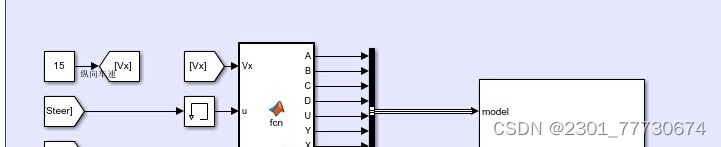
基于MPC 模型预测控制的轨迹跟随,横向控制模型,车道保持,simulink模型
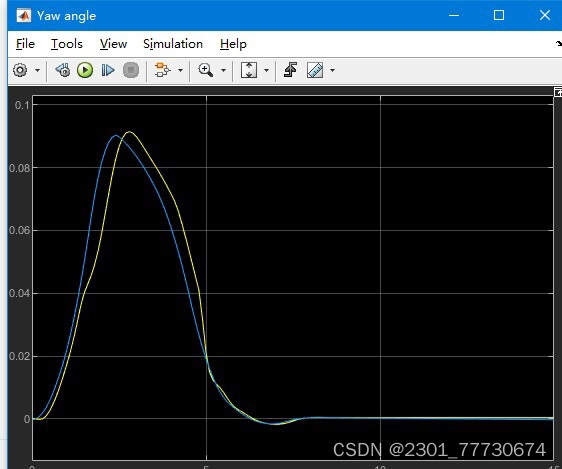
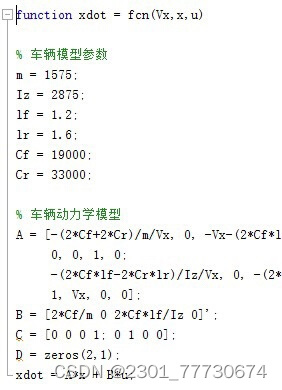
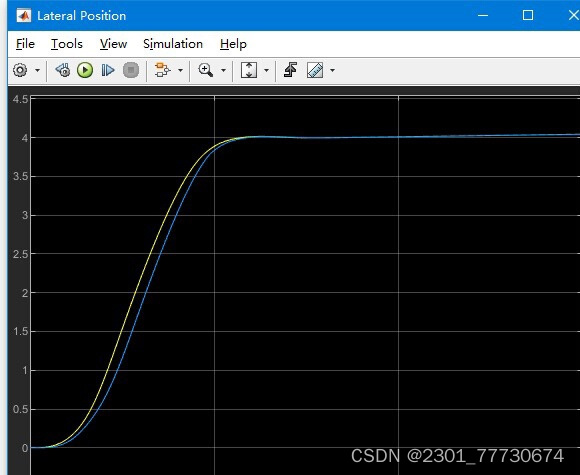
采用二自由度车辆动力学模型,可以自定义车辆参数,自定义目标轨迹,图中为单移线目标轨迹与实际轨迹偏差
ID:6350672318493560
基于MPC 模型预测控制的轨迹跟随,横向控制模型,车道保持,simulink模型
采用二自由度车辆动力学模型,可以自定义车辆参数,自定义目标轨迹,图中为单移线目标轨迹与实际轨迹偏差
ID:6350672318493560
 2553
365
2406
674
8468
2553
365
2406
674
8468











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























