






自动驾驶控制-车辆三自由度动力学MPC跟踪双移线
matlab和simulink联合仿真,基于车辆三自由度动力学模型的mpc跟踪双移线。
ID:8432706190794883
阿Xin的自动驾驶小店
自动驾驶技术是近年来备受关注的领域之一,而车辆控制则是其中的重要组成部分。随着科技的不断发展,一种基于车辆三自由度动力学模型的MPC(Model Predictive Control)跟踪双移线方法在自动驾驶控制中逐渐被广泛应用。本文将介绍如何使用Matlab和Simulink这两个强大的仿真工具实现这种基于动力学模型的MPC控制。
首先,让我们来了解一下什么是车辆三自由度动力学模型。车辆三自由度动力学模型是一种用数学方程描述车辆运动的模型,它考虑了车辆在平面上的横向运动、纵向运动以及车身姿态的变化。通过对车辆的动力学特性进行建模,可以更准确地描述车辆的运动过程,并为控制算法的设计提供基础。
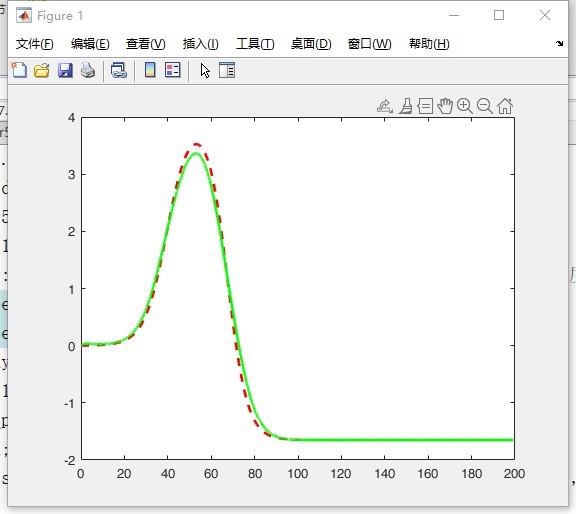
在自动驾驶控制中,MPC是一种常用的控制策略。MPC算法通过预测车辆在未来一段时间内的运动轨迹,并将其与期望路径进行比较,从而生成控制指令,使车辆能够准确地跟踪期望路径。而双移线则是指车辆在复杂的道路环境中能够同时跟踪两个移动目标,如其他车辆或行人。这种双移线的控制方法可以提高自动驾驶车辆在多目标跟踪和避障方面的能力,从而增强驾驶的安全性和可靠性。
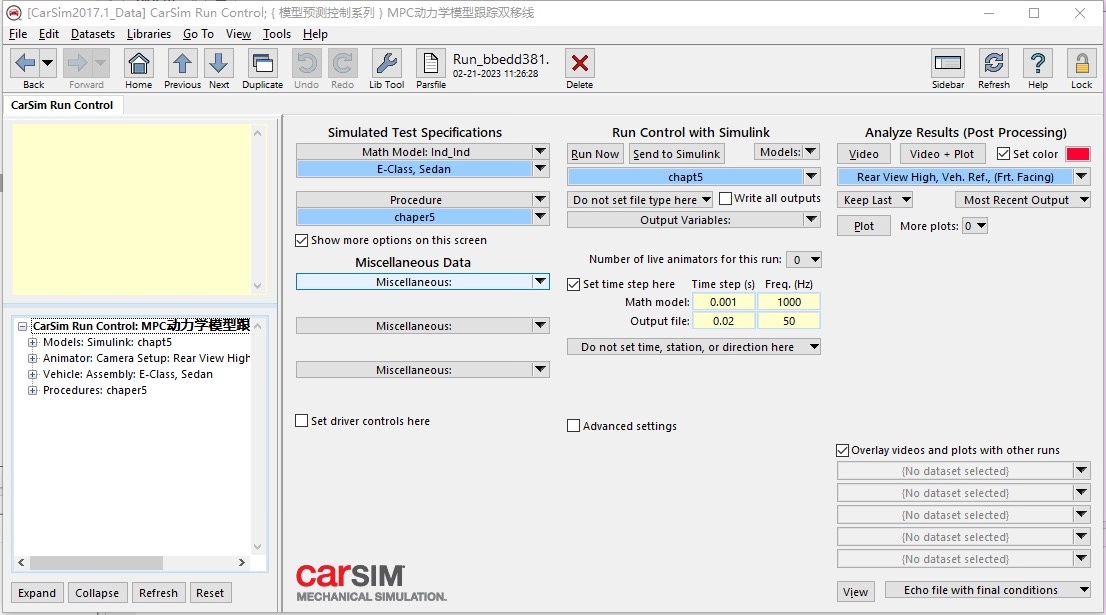
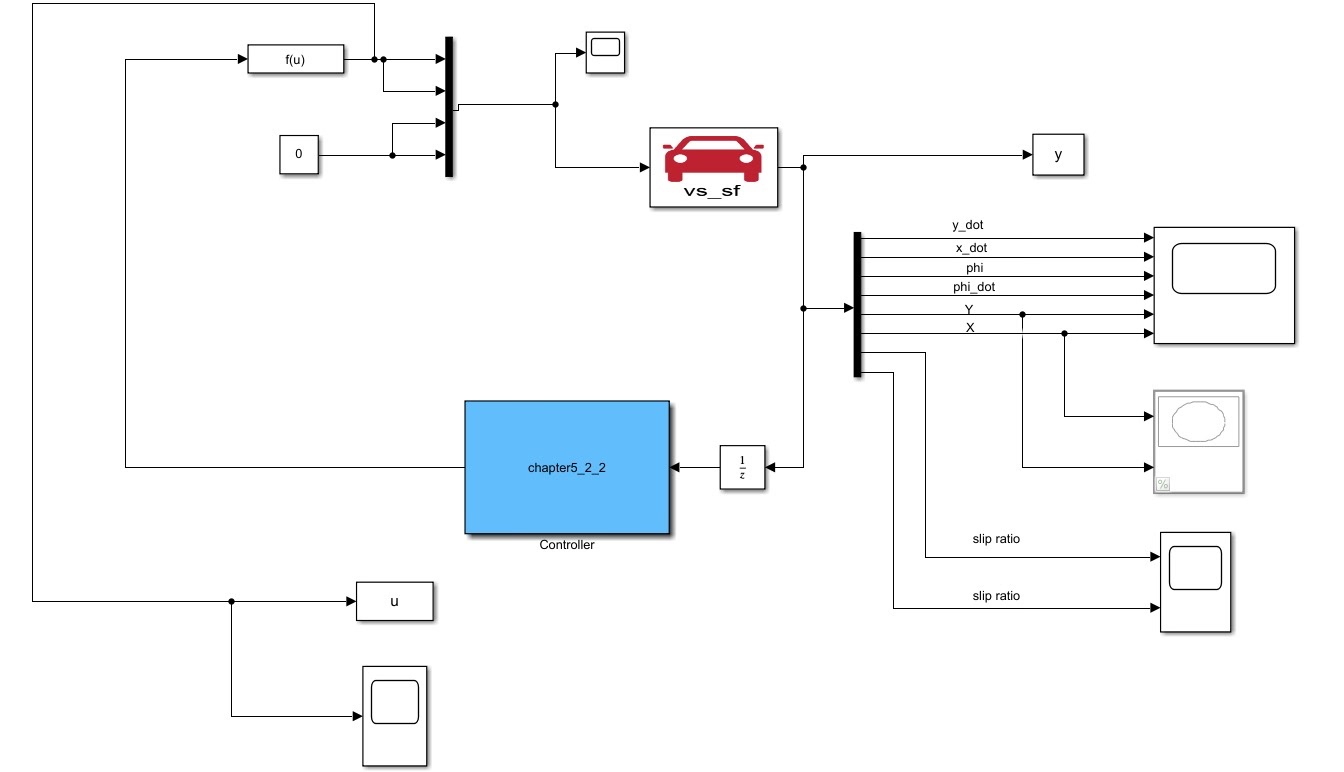
为了实现基于车辆三自由度动力学模型的MPC跟踪双移线,我们可以利用Matlab和Simulink进行联合仿真。Matlab是一种强大的数学计算工具,而Simulink则是Matlab的一个扩展模块,可用于建立和仿真动态系统模型。利用这两个工具,我们可以方便地搭建车辆动力学模型和MPC控制算法的仿真环境。
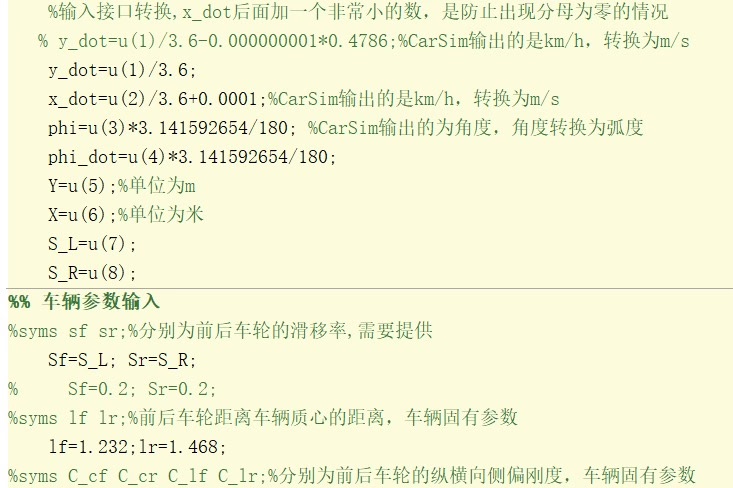
在进行联合仿真前,首先需要建立车辆三自由度动力学模型。根据车辆的几何参数和动力学特性,可以推导出车辆的运动方程。其中,横向运动方程描述车辆的横向加速度和转角变化,纵向运动方程描述车辆的纵向加速度和速度变化,姿态运动方程描述车身姿态的变化。将这些方程组合在一起,就可以建立车辆的三自由度动力学模型。
接下来,我们需要设计MPC跟踪双移线的控制算法。MPC算法的核心是预测模型和代价函数。预测模型用于预测车辆在未来一段时间内的运动轨迹,而代价函数则用于评估车辆与期望路径的偏离程度,并生成控制指令。在MPC跟踪双移线中,我们需要针对两个移动目标分别建立预测模型和代价函数,并进行优化计算,以实现双移线跟踪。
利用Matlab和Simulink进行联合仿真,我们可以将车辆三自由度动力学模型和MPC控制算法进行集成,从而实现对自动驾驶车辆的完整控制。通过设置不同的道路环境和移动目标,我们可以评估算法在不同场景下的性能表现,并进行优化调整。此外,Matlab和Simulink还提供了丰富的可视化和分析工具,使我们能够深入理解控制算法的内部机理,进一步提升算法的性能和鲁棒性。
总而言之,基于车辆三自由度动力学模型的MPC跟踪双移线方法是一种在自动驾驶控制中应用广泛的技术。借助Matlab和Simulink这两个强大的仿真工具,我们可以方便地搭建仿真环境,建立车辆动力学模型,并设计MPC控制算法。通过联合仿真,我们可以深入探究算法的性能和机理,并进行优化调整,从而实现更准确、安全、可靠的自动驾驶控制。
【相关代码,程序地址】:http://fansik.cn/706190794883.html
















 5235
5235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









