






- 使用socket通讯使plc与机器人通讯主要用以下两个块
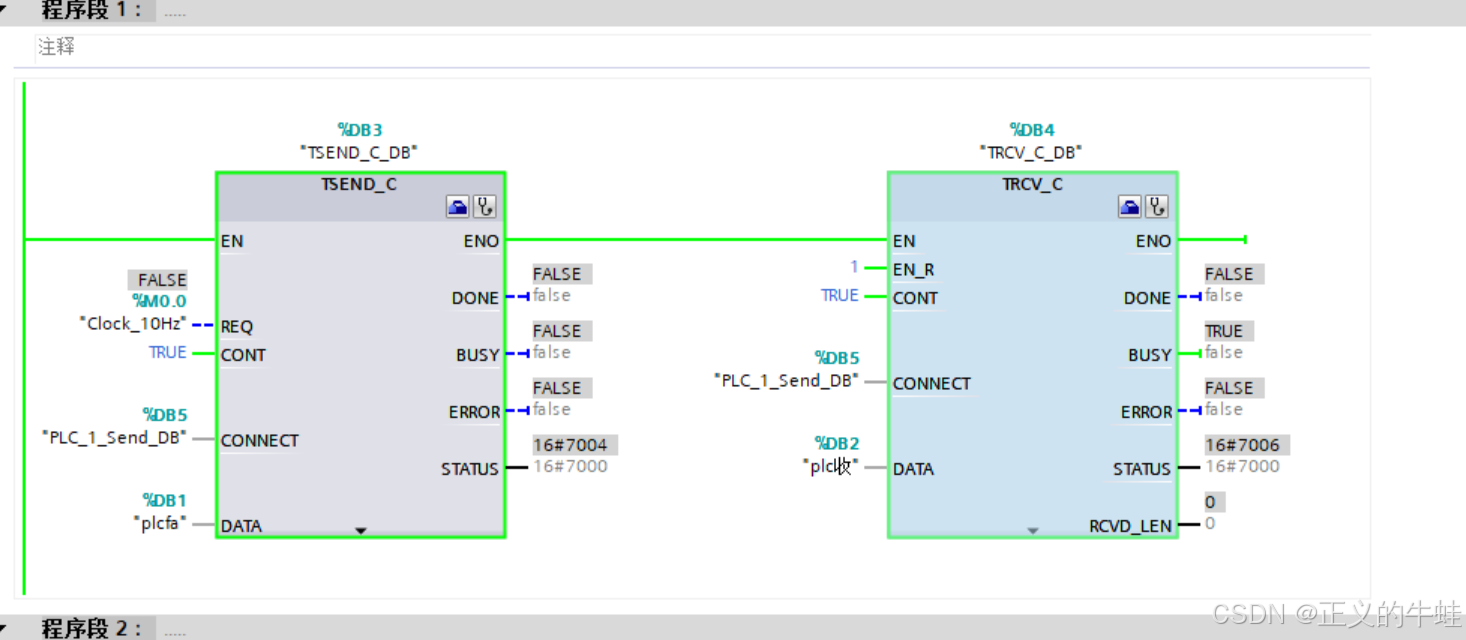 TSEND-C块是plc发送数据的块 TRCV-C是使plc接受数据的块
TSEND-C块是plc发送数据的块 TRCV-C是使plc接受数据的块- 使用了一个10HZ的脉冲信号
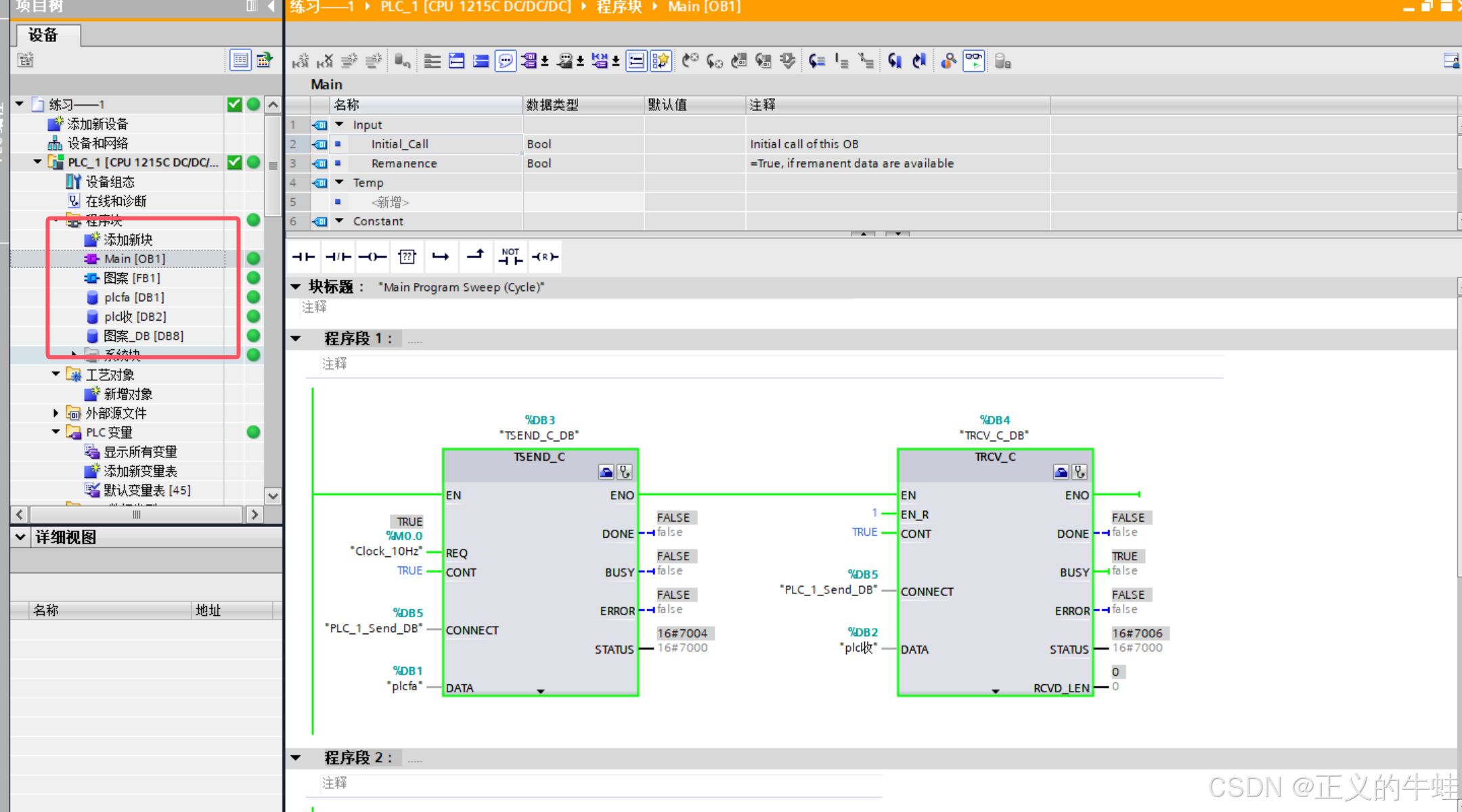
- 红色框框选择的是我自己做的数据块 :其中plcfa是plc存储发送数据的块
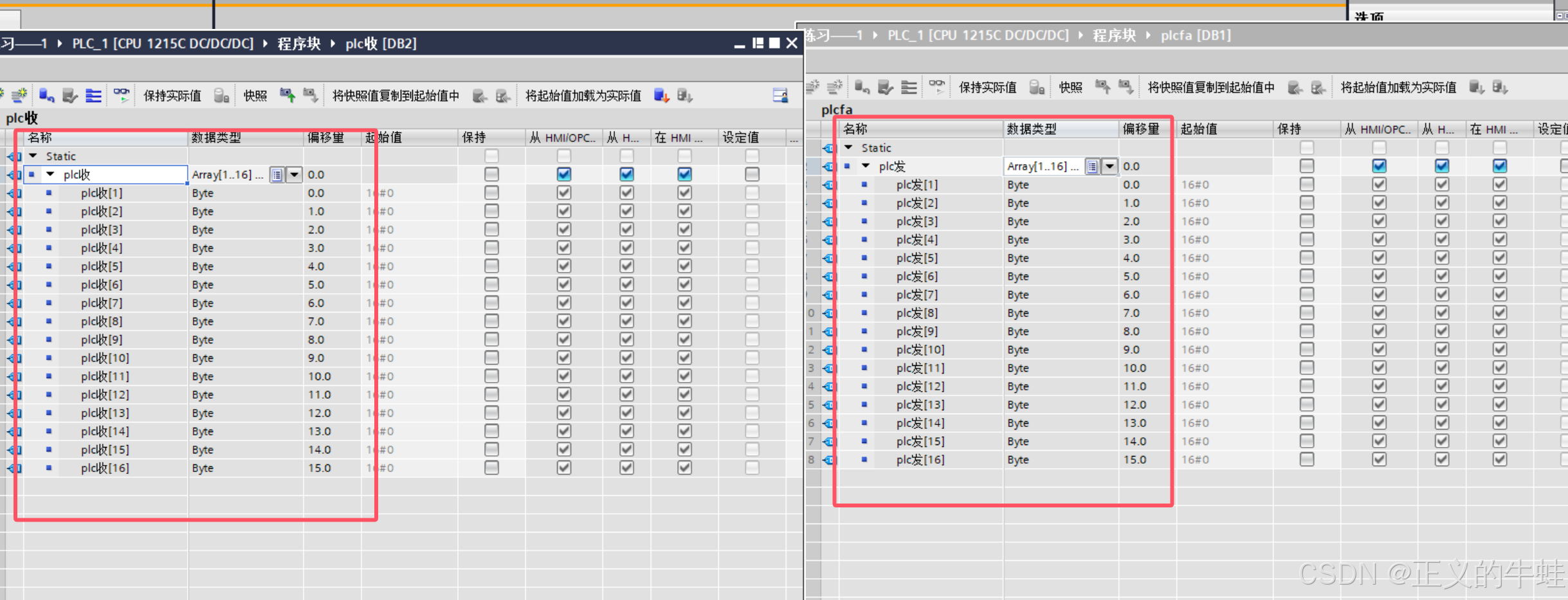
- plc收是plc存储接受外来设备发送数据的块
- 这两个块里面都是以array(数组)形式存储的以便与机器人互传数据
- 还有一个图案FB块与一个另一个图案DB块,是自己封装的一个块
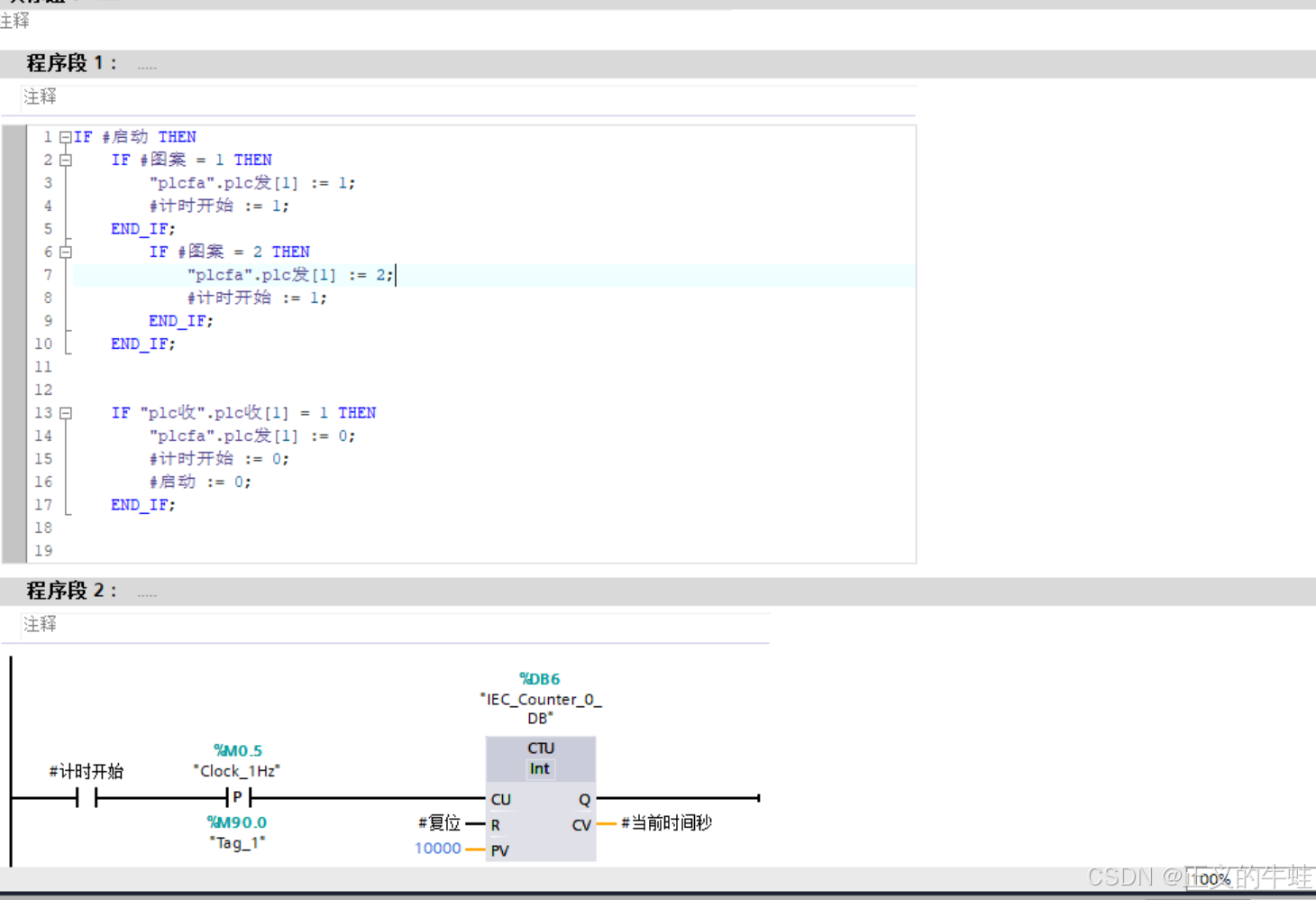
- 使用了IF判断了启动开关和图案的选择,判断后使发送数据块给机器人发送数字信号,使机器人做相关的动作。
- 程序段2是写了一个简单的秒计时器,主要是计时机器人接收到一个指令执行动作的时间
- 使用了一个计时开始的bool,和一个使用1HZ的脉冲的上升沿。
- 还使用了一个CTU块(计数器),计时开始一直导通,上升沿以1HZ的频率闪烁,每一hz接通一下计数器,数据存储在当前秒里。
- 同理:时分秒甚至天周年也可以使用同种方法
- 以下附上仿真HMI的视频
- 屏幕录制 2024-12-03 153017-CSDN直播视频
https://live.csdn.net/v/436982
-
屏幕录制 2024-12-03 153017
机器人运动视频
-
VID20241203153933
VID20241203144420

















05-17
 516
516
516

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









