







写在最后
可能有人会问我为什么愿意去花时间帮助大家实现求职梦想,因为我一直坚信时间是可以复制的。我牺牲了自己的大概十个小时写了这片文章,换来的是成千上万的求职者节约几天甚至几周时间浪费在无用的资源上。


上面的这些(算法与数据结构)+(Java多线程学习手册)+(计算机网络顶级教程)等学习资源
{
public:
SubscriberNode() : Node(“lab_topic_sub”)
{
subscriber_ = create_subscription<geometry_msgs::msg::Twist>(
“/turtle1/cmd_vel”, 10, std::bind(&SubscriberNode::OnPoseCallback, this, _1));
}
private:
void OnPoseCallback(const geometry_msgs::msg::Twist & msg) const
{
RCLCPP\_INFO(get\_logger(), "Publishing: x: %.2f, z: %.2f", msg.linear.x, msg.angular.z);
}
rclcpp::Subscription<geometry_msgs::msg::Twist>::SharedPtr subscriber_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared());
rclcpp::shutdown();
return 0;
}
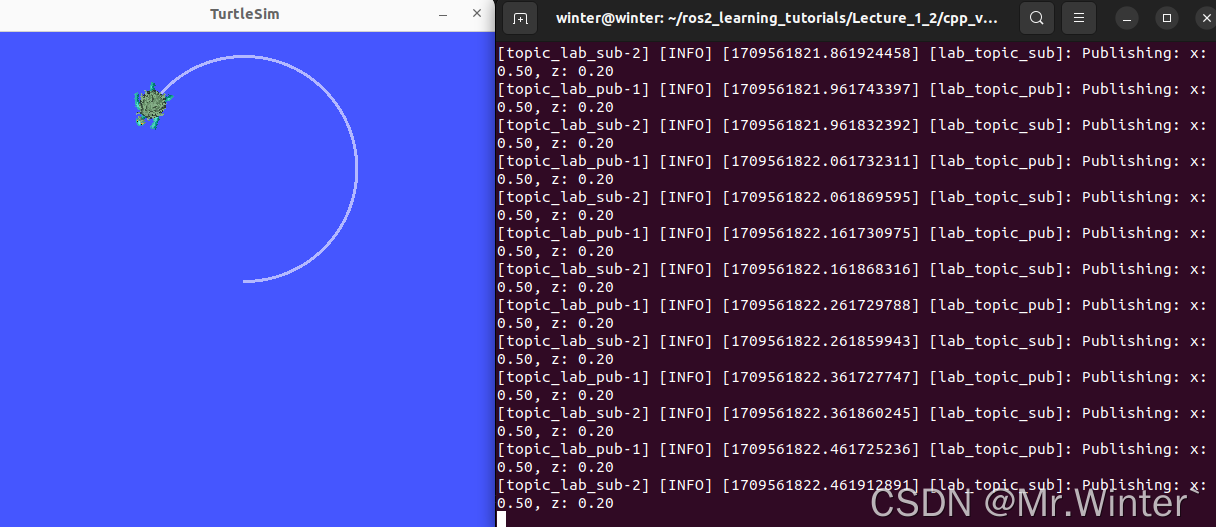
话题通信的效果如下所示:
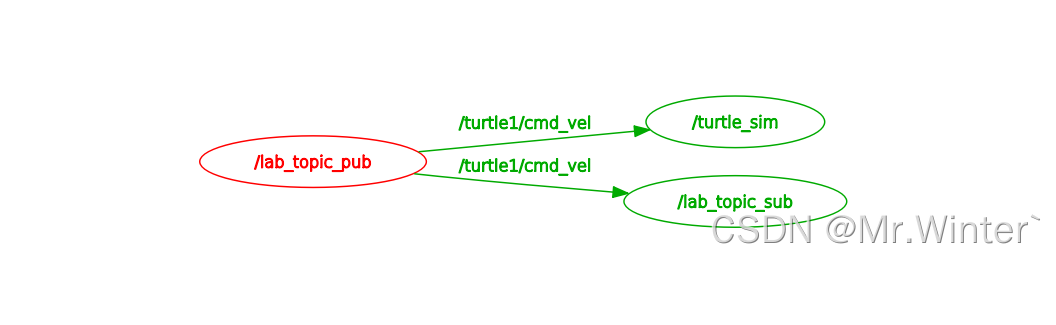
计算图可视化为:
## 3 话题模型实现(Python)
>
> 实验目标:发布者发布控制消息到`/turtle1/cmd_vel`,控制乌龟其做圆周运动;订阅者订阅`/turtle1/cmd_vel`,在终端显示乌龟实时的位置坐标。
>
>
>
* **发布者**
class PublisherNode(Node):
def __init__(self, name):
super().init(name)
self.publisher_ = self.create_publisher(Twist, ‘/turtle1/cmd_vel’, 10)
def publish(self, msg: Twist):
self.publisher_.publish(msg)
* **订阅者**
class SubscriberNode(Node):
def __init__(self, name):
super().init(name)
self.subscirber_ = self.create_subscription(
Twist, ‘/turtle1/cmd_vel’, self.OnPoseCallback, 10
)
def OnPoseCallback(self, msg):
self.get_logger().info(f"Publishing: x: {msg.linear.x:.2f}, z: {msg.angular.z:.2f}")
def main(args=None):
rclpy.init(args=args)
node = SubscriberNode(“lab_topic_sub”)
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
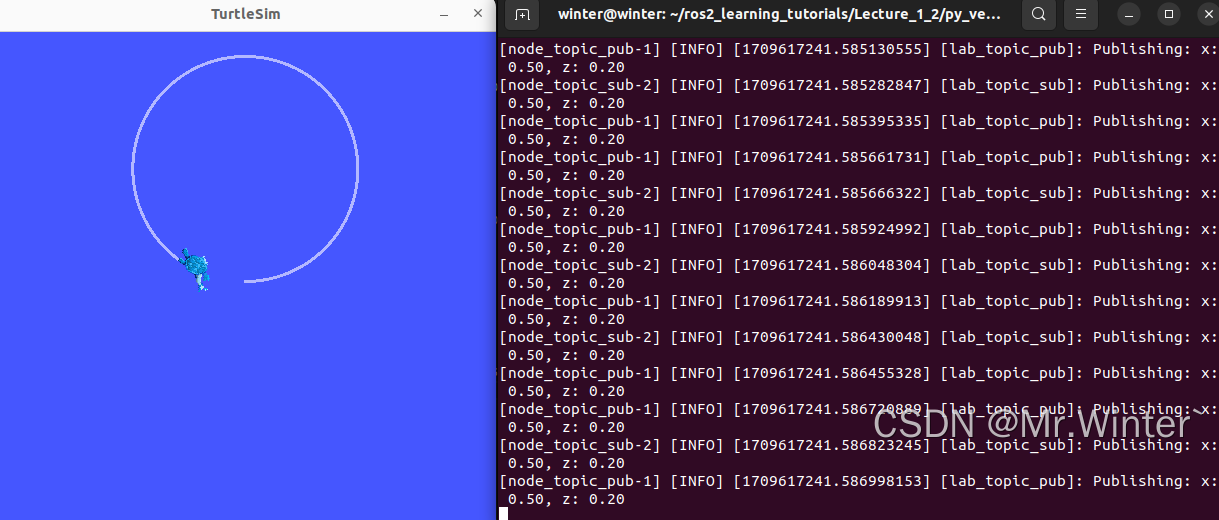
话题通信的效果如下所示:
## 4 自定义消息
ROS2系统通过`std_msgs`封装了一些常用的原生数据类型,比如`String`、`Int32`、`Int64`等,对于一些复杂数据应用场景,往往需要在`std_msgs`或其他消息库的基础上继续封装更高级的数据类型
自定义消息的通用流程如下:
>
> * 功能包下新建`msg`文件夹,在其中添加自定义消息`xxx.msg`
> * 功能包`package.xml`中添加编译依赖与执行依赖
> ```
> <buildtool\_depend>rosidl_default_generators</buildtool\_depend>
> <exec\_depend>rosidl_default_runtime</exec\_depend>
> <member\_of\_group>rosidl_interface_packages</member\_of\_group>
>
> ```
> * 功能包`CMakeLists.txt`中添加编译消息相关依赖
> ```
> find_package(rosidl_default_generators REQUIRED)
> rosidl_generate_interfaces(${PROJECT_NAME}
> "xxx.msg"
> DEPENDENCIES xxx_msgs
> )
>
> ament_export_dependencies(rosidl_default_runtime)
>
> ```
> * 编译自定义消息,在`install/<pkg_name>/include`中生成由`xxx.msg`编译的C++可识别的`xxx.hpp`头文件
> * 引入`xxx.hpp`即可调用自定义消息
>
>
>
下面给出一个实例:
添加如下自定义消息,并按上面步骤配置依赖
Person.msg
string name
string gender
uint8 age
geometry_msgs/Point position
float64 x
float64 y
float64 z
定义一个发布者、一个订阅者测试自定义消息
* **发布者**
// 初始化名为personPub的ROS节点, 该节点应在CMakeLists.txt中被构建为可执行文件
ros::init(argc, argv, “personPub”);
// 创建节点句柄
ros::NodeHandle pubNode;
// 创建发布者, 该发布者属于pubNode节点, 发布话题为"/person/info",
// 消息类型为"msgtest::Person", 发布队列长度为10
ros::Publisher pub = pubNode.advertise<msg_lab::Person>(“/person/info”, 10);
// 设置发布频率
ros::Rate loopRate(10);
while(ros::ok())
{
// 设置消息
msg_lab::Person msg;
msg.name = “winter”;
msg.gender = “man”;
msg.age = 20;
msg.position.x = 10;
msg.position.y = 20;
msg.position.z = 30;
// 发布消息
pub.publish(msg);
ROS_INFO(“Publish Person Info[name: %s gender: %s age: %d pos: x-%.2f y-%.2f z-%.2f]”,
msg.name.c_str(), msg.gender.c_str(), msg.age, msg.position.x, msg.position.y, msg.position.z);
// 按循环频率延时
loopRate.sleep();
}
* **订阅者**
void personInfoCallBack(const msg_lab::Person::ConstPtr &msg)
{
ROS_INFO(“Subscribe Person Info[name: %s gender: %s age: %d pos: x-%.2f y-%.2f z-%.2f]”,
msg->name.c_str(), msg->gender.c_str(), msg->age, msg->position.x, msg->position.y, msg->position.z);
}
int main(int argc, char** argv)
{
// 初始化名为personSub的ROS节点, 该节点应在CMakeLists.txt中被构建为可执行文件
ros::init(argc, argv, “personSub”);
// 创建节点句柄
ros::NodeHandle subNode;
// 创建订阅者, 该订阅者属于subNode节点, 订阅话题为"/person/info",
// 订阅队列长度为10, 收到订阅消息后出发回调函数personInfoCallBack
ros::Subscriber sub = subNode.subscribe(“/person/info”, 10, personInfoCallBack);
// 循环等待回调函数
ros::spin();
return 0;
}
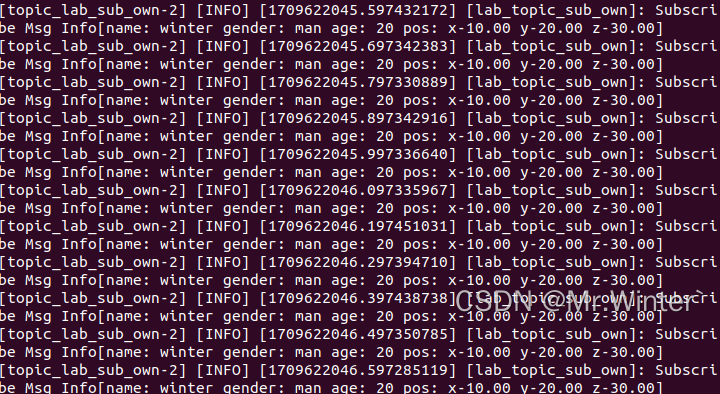
实测效果如下:
### 最后
**经过日积月累, 以下是小编归纳整理的深入了解Java虚拟机文档,希望可以帮助大家过关斩将顺利通过面试。**
由于整个文档比较全面,内容比较多,篇幅不允许,下面以截图方式展示 。







**由于篇幅限制,文档的详解资料太全面,细节内容太多,所以只把部分知识点截图出来粗略的介绍,每个小节点里面都有更细化的内容!**
> **本文已被[CODING开源项目:【一线大厂Java面试题解析+核心总结学习笔记+最新讲解视频+实战项目源码】](https://bbs.csdn.net/forums/4f45ff00ff254613a03fab5e56a57acb)收录**
**[需要这份系统化的资料的朋友,可以点击这里获取](https://bbs.csdn.net/forums/4f45ff00ff254613a03fab5e56a57acb)**
的介绍,每个小节点里面都有更细化的内容!**
> **本文已被[CODING开源项目:【一线大厂Java面试题解析+核心总结学习笔记+最新讲解视频+实战项目源码】](https://bbs.csdn.net/forums/4f45ff00ff254613a03fab5e56a57acb)收录**
**[需要这份系统化的资料的朋友,可以点击这里获取](https://bbs.csdn.net/forums/4f45ff00ff254613a03fab5e56a57acb)**















 476
476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









