一、目标检测定义与核心任务
1. 定义
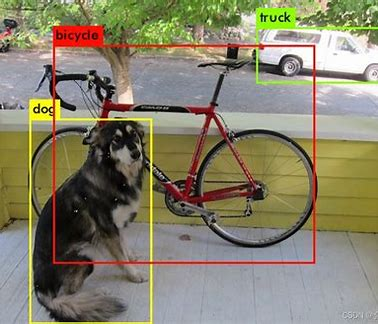
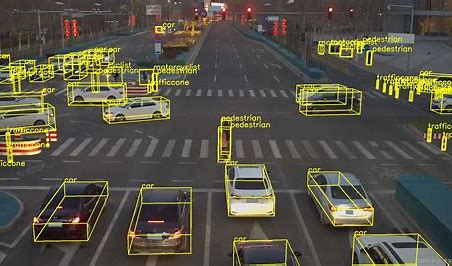
- 任务:在图像/视频中定位并分类所有感兴趣目标,输出边界框(Bounding Box)和类别标签。
- 核心输出:
- 坐标:((x_1, y_1, x_2, y_2))(左上角+右下角)或 ((x, y, w, h))(中心+宽高)。
- 类别:离散标签(如“汽车”“行人”)。
- 置信度:目标存在的概率(用于后处理筛选)。
2. 关键挑战
- 多尺度变化:目标大小差异大(如远处车辆vs近处行人)。
- 遮挡与模糊:部分目标被遮挡或成像质量差。
- 类别不平衡:数据集中少数类别样本稀缺。
- 实时性需求:自动驾驶等场景要求毫秒级响应。
二、发展历程:从传统方法到深度学习
1. 传统方法(2010年前)
- 手工特征阶段:
- HOG+SVM(2005):梯度方向直方图提取边缘特征,SVM分类。
- DPM(可变形部件模型)(2008):基于滑动窗口,结合部件模板匹配,处理目标形变。
- 缺陷:依赖人工设计特征,泛化能力弱,计算效率低。
2. 深度学习早期(2014-2017:两阶段检测器主导)
- R-CNN系列:
- R-CNN(2014):首次将CNN引入目标检测,流程:选择性搜索生成2k候选框→CNN提取特征→SVM分类→回归调整边界框。缺点:耗时(单图47s),重复计算。
- Fast R-CNN(2015):引入ROI池化共享特征计算,联合优化分类与回归,速度提升至2s/图。
- Faster R-CNN(2015):提出区域建议网络(RPN)替代选择性搜索,端到端训练,首次实现实时性(17fps)。
- 里程碑:证明深度学习在目标检测的绝对优势,奠定两阶段框架(候选框生成+分类回归)。
3. 单阶段崛起(2016-2020:效率优先)
- YOLO系列:
- YOLOv1(2016):颠覆两阶段范式,直接将图像划分为(S×S)网格,每个网格预测边界框和类别,速度达45fps(牺牲部分精度)。
- SSD(2016):多尺度特征图预测,兼顾速度(59fps)与精度,首次在移动端可用。
- YOLOv2-v3(2017):引入锚框聚类、多尺度训练、FPN特征融合,精度接近两阶段模型,速度保持领先。
- RetinaNet(2017):提出焦点损失(Focal Loss)解决正负样本失衡,单阶段精度首次超越两阶段。
4. 无锚框与Transformer时代(2020-至今)
- Anchor-Free:
- CenterNet(2019):通过关键点检测目标中心,回归宽高,避免锚框设计,简化流程。
- FCOS(2019):逐像素预测“是否属于目标”及相对位置,完全无锚,泛化能力强。
- Transformer融合:
- DETR(2020):首次将Transformer引入检测,端到端消除NMS,通过集合预测直接输出结果,但收敛慢(500epochs)。
- Swin Transformer(2021):结合局部注意力与层次化特征,在COCO数据集刷新mAP纪录(58.7%)。
- 轻量化与实时化:
- YOLOv5/v6/v7/v8:持续优化网络结构(CSP模块、动态网络),适应边缘设备(如YOLOv8n在CPU达160fps)。
- NanoDet/PP-YOLO:模型压缩技术(知识蒸馏、量化)推动移动端部署。
三、核心技术模块详解
1. 候选区域生成(两阶段检测器)
- RPN(区域建议网络):
- 原理:在特征图上滑动窗口,生成锚框(预设不同尺度/比例),分类锚框为“前景/背景”,回归锚框偏移。
- 优势:替代传统选择性搜索,生成建议框速度提升100倍。
- 锚框设计:
- 超参数:尺度(如32×32, 64×64)、比例(1:1, 1:2, 2:1),通常通过K-means聚类数据集真实框确定。
- 问题:锚框数量多导致正负样本失衡(99%为背景),催生Focal Loss等优化。
2. 特征提取网络
- 经典Backbone:
- VGG(2014):堆叠3×3卷积,奠定深度CNN基础。
- ResNet(2015):残差连接解决梯度消失,支持超深网络(如ResNet-101)。
- DenseNet(2017):密集连接复用特征,减少参数量。
- 多尺度特征融合:
- FPN(特征金字塔网络,2017):自顶向下融合高层语义与底层细节,提升小目标检测。
- PANet(2018):增加自底向上路径,强化不同层级特征流动。
- BiFPN(2020):加权双向特征融合,动态调整跨层连接权重。
- Transformer类Backbone:
- Swin Transformer:分层窗口注意力,兼顾局部与全局建模,分辨率适配性强。
- Vision Transformer(ViT):纯Transformer架构,在大规模数据集预训练后性能超越CNN。
3. 分类与回归头
- 分类任务:
- 多类别softmax:输出类别概率分布,交叉熵损失优化。
- 焦点损失(Focal Loss):通过(\alpha)和(\gamma)参数降低简单样本权重,缓解正负/难易样本失衡。
- 回归任务:
- 目标:预测锚框/中心点到真实框的偏移量((\Delta x, \Delta y, \Delta w, \Delta h))。
- 损失函数:
- Smooth L1:对离群值不敏感,优于L2损失。
- IoU Loss系列:
- IoU(2016):直接优化边界框重叠度,解决L1/L2不直接关联定位精度的问题。
- GIoU(2019):考虑包围框面积,处理不相交框的梯度消失。
- DIoU/CIoU(2020):进一步引入中心点距离和长宽比约束,收敛更快、定位更准。
4. 后处理:边界框筛选
- NMS(非极大值抑制):
- 流程:按置信度排序→保留最高分框→抑制与最高分框IoU超过阈值(如0.5)的框→重复直至处理所有框。
- 变体:
- Soft-NMS:不直接删除高IoU框,而是降低其置信度,避免漏检遮挡目标。
- DIoU-NMS:用DIoU替代传统IoU,考虑中心点距离,更适合密集目标场景(如人群)。
- 锚框解码:
- 将模型预测的偏移量转换为真实坐标,需考虑锚框初始尺寸和特征图缩放因子。
5. 无锚框机制(Anchor-Free)
- 关键点检测:
- CornerNet(2018):检测目标的左上角和右下角关键点,组合成边界框。
- CenterNet(2019):预测目标中心热力图,直接回归宽高,无需分组关键点。
- 逐像素预测:
- FCOS(2019):每个像素若位于目标框内,则预测其到框四边的距离(l, t, r, b),通过中心度(Centerness)抑制远离中心的低质量框。
- 优势:消除锚框超参数(如数量、尺度),减少内存占用,提升泛化能力(尤其未知形状目标)。
四、主流算法分类与对比
1. 两阶段检测器(Two-Stage)
| 算法 | 核心创新 | 优势 | 劣势 | 典型应用 |
|---|
| Faster R-CNN | RPN替代选择性搜索 | 精度高(COCO mAP 43.5%) | 速度慢(5fps) | 高精度场景 |
| Mask R-CNN | 增加实例分割分支 | 同时实现检测与分割 | 计算量翻倍 | 医学影像分析 |
| Cascade R-CNN | 级联多个回归器逐步优化框 | 极端IoU下精度提升 | 推理时间更长 | 工业质检 |
2. 单阶段检测器(One-Stage)
| 算法 | 核心创新 | 优势 | 劣势 | 典型应用 |
|---|
| YOLO系列 | 网格直接预测框+类别 | 速度极快(v8s达220fps) | 小目标检测较弱 | 自动驾驶 |
| SSD | 多尺度特征图预测 | 移动端友好(30fps) | 锚框设计依赖经验 | 手机摄像头 |
| RetinaNet | 焦点损失解决样本失衡 | 单阶段精度首次超越两阶段 | 计算量较高 | 通用检测 |
3. 无锚框检测器(Anchor-Free)
| 算法 | 核心思路 | 优势 | 劣势 | 典型应用 |
|---|
| CenterNet | 中心点+宽高回归 | 模型简单,无锚框设计 | 密集目标易漏检 | 无人机巡检 |
| FCOS | 逐像素距离回归+中心度 | 泛化能力强 | 需多层特征融合 | 遥感目标检测 |
4. Transformer基检测器
| 算法 | 核心思路 | 优势 | 劣势 | 典型应用 |
|---|
| DETR | Transformer集合预测+二分匹配 | 端到端无NMS | 收敛慢(500epochs) | 学术研究 |
| Deformable DETR | 可变形注意力减少计算量 | 速度提升3倍 | 精度略降 | 视频检测 |
| Swin Transformer Detector | 层次化Transformer+窗口注意力 | 刷新COCO mAP至58.7% | 参数量大(100M+) | 科研竞赛 |
五、评估指标:全面衡量性能
1. 精度指标
- mAP(平均精度均值):
- 计算每个类别在不同置信度阈值下的精确率-召回率曲线(AP),再取所有类别的平均值。
- COCO数据集采用多IoU阈值(0.5到0.95,步长0.05)的平均值(mAP@0.5:0.95),更严格评估定位精度。
- 细分指标:mAP_s/mAP_m/mAP_l(小/中/大目标)。
- 召回率(Recall):检测到的真实目标占所有真实目标的比例(避免漏检)。
- 精确率(Precision):检测结果中正确目标的比例(避免误检)。
2. 效率指标
- FPS(帧率):每秒处理图像数,衡量实时性(≥30fps为流畅)。
- 模型复杂度:
- 参数量(Params):影响模型大小(如YOLOv8n为3.2M,DETR为85M)。
- 计算量(FLOPs):浮点运算次数,反映推理耗时(如ResNet-50约4FLOPs)。
3. 其他指标
- F1分数:精确率与召回率的调和平均,平衡两者的综合指标。
- 推理延迟:端到端处理时间(包括数据加载、前向传播、后处理),硬件敏感(GPU/CPU/NPU差异大)。
六、训练技巧:提升模型性能的关键
1. 数据增强
- 基础增强:翻转、裁剪、缩放、颜色抖动,提升数据多样性。
- 高级增强:
- Mosaic(YOLOv4):拼接4张图像,丰富小目标数量,增强上下文关联。
- MixUp:融合两张图像及其标签,抑制模型对单一样本的过拟合。
- CutOut/CutMix:随机遮挡区域或替换区域,提升模型抗遮挡能力。
2. 样本平衡策略
- 难例挖掘:
- OHEM(在线难例挖掘,Fast R-CNN):选择损失最高的样本训练,聚焦难分样本。
- 焦点损失(RetinaNet):通过指数衰减降低简单样本权重,无需显式筛选。
- 类别平衡:
- 过采样少数类、欠采样多数类,或使用标签平滑(Label Smoothing)缓解类别不平衡。
3. 多尺度训练与测试
- 训练阶段:YOLO动态调整输入图像尺寸(如416×416到608×608),提升模型对不同尺度目标的鲁棒性。
- 测试阶段:多尺度推断(MS-COCO标准),融合不同尺寸结果,提升小目标检测精度。
4. 损失函数优化
- 定位损失:优先选择CIoU Loss(同时优化重叠度、中心点距离、长宽比),替代传统Smooth L1。
- 分类损失:结合Focal Loss(处理正负失衡)与Label Smoothing(防止过自信)。
- 多任务联合优化:如Mask R-CNN同时优化检测损失与分割损失,共享底层特征。
5. 模型优化
- 骨干网络选择:轻量模型(如MobileNet、ShuffleNet)用于移动端,深层网络(ResNet-101)用于服务器端。
- 网络结构设计:引入CSP模块(YOLOv5)减少计算量,使用深度可分离卷积(Xception)降低参数量。
- 预训练与迁移学习:在ImageNet上预训练骨干网络,再在检测数据集上微调,加速收敛并提升精度。
七、应用场景:技术落地的核心领域
1. 安防与监控
- 人脸检测与识别:门禁系统、犯罪追踪(需高实时性与精度)。
- 异常行为检测:摔倒检测、入侵报警,结合视频序列分析(如YOLO+DeepSORT跟踪)。
2. 自动驾驶
- 多传感器融合:摄像头检测+雷达点云定位,处理复杂路况(如特斯拉FSD芯片部署YOLO变体)。
- 实时性要求:200ms内完成检测(对应5fps),支持紧急制动决策,典型算法:YOLOv8、BEVDet(鸟瞰图检测)。
3. 医疗影像
- 病灶检测:CT/MRI中的肿瘤、结节定位,需极高精度(mAP>90%),常用算法:3D目标检测(如VNet)、弱监督检测(仅图像级标签训练)。
- 挑战:数据稀缺、标注成本高,依赖迁移学习与数据增强。
4. 工业与遥感
- 缺陷检测:电路板焊点缺陷、机械零件裂纹,要求像素级定位,常用算法:Faster R-CNN(高精度)、CenterNet(快速部署)。
- 遥感目标检测:无人机/卫星图像中的船舶、车辆检测,需处理旋转目标(使用RRPN旋转锚框)和小目标密集场景。
5. 消费级应用
- 手机摄影:实时物体识别(如Google Lens)、人像虚化(检测人体边界),依赖轻量模型(如SSD-MobileNet)。
- 电商与物流:商品检测(货架补货)、包裹分拣,结合OCR识别提升效率。
八、当前挑战与未来方向
1. 核心挑战
- 长尾分布:少数类别样本不足,导致漏检(如罕见鸟类检测),需小样本学习(Few-Shot Learning)与元学习。
- 开放世界检测:未知类别误判为已知类别,需引入开放集识别(Open-Set Recognition),输出“未知”类别。
- 鲁棒性不足:对抗样本攻击(如贴纸误导自动驾驶检测)、极端环境(低光照、雨雾)性能骤降,需对抗训练与域适应(Domain Adaptation)。
2. 未来研究方向
- 高效检测架构:
- 动态网络(Dynamic Network):根据输入复杂度自适应调整计算量(如YOLOv8的动态尺度)。
- 神经架构搜索(NAS):自动设计最优网络结构,平衡精度与速度。
- 多模态融合:
- 结合视觉、红外、激光雷达(LiDAR)数据,提升复杂场景检测能力(如自动驾驶多传感器融合模型)。
- 视频时空建模:引入3D CNN或Transformer处理时序信息,优化视频检测与跟踪(如DETR3D)。
- 自监督与弱监督:
- 利用海量无标注数据预训练(如MAE掩码自编码器),降低标注成本。
- 弱监督检测:仅用图像级标签训练(如ILSVRC数据集),通过注意力机制定位目标区域。
- 轻量化与边缘部署:
- 模型压缩(剪枝、量化、知识蒸馏):使YOLOv8n在ARM芯片达100fps。
- 端云协同:边缘设备实时检测,云端处理复杂场景,构建分布式检测系统。
九、总结
目标检测历经从手工特征到深度学习的变革,形成两阶段、单阶段、无锚框、Transformer四大技术路线,覆盖精度、速度、泛化能力的不同需求。未来发展将聚焦高效化(边缘部署)、鲁棒化(复杂环境)、智能化(自监督/多模态),推动技术在安防、自动驾驶、医疗等领域的深度落地。掌握核心模块(特征提取、锚框机制、损失函数、后处理)与主流算法的优缺点,是理解和改进目标检测系统的关键。


























 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









