






摘要
神经网络架构搜索(Neural Architecture Search, NAS)已成为深度学习领域的重要研究方向,它能够自动发现性能优异的神经网络架构,减少人工设计的工作量。本文介绍了一种基于NSGA-II多目标进化算法的神经网络架构搜索方法,并重点展示了一系列先进的可视化技术,这些技术可以帮助研究人员更好地理解搜索过程和结果。实验表明,我们的方法能够在模型性能和计算复杂度之间取得良好的平衡,并通过丰富的可视化手段使搜索过程更加透明和可解释。
1. 引言
深度学习的成功很大程度上依赖于神经网络架构的设计。传统上,这些架构主要由人工设计,如ResNet、DenseNet等。然而,人工设计架构需要大量专业知识,并且难以适应不同的应用场景。神经网络架构搜索(NAS)作为自动机器学习(AutoML)的一个重要分支,旨在自动发现适合特定任务的最优网络架构,已成为近年来研究热点[1,2]。
多目标进化算法是NAS中的一类重要方法,它能够同时优化多个目标(如准确率、参数量、推理时间等),为决策者提供一系列帕累托最优的解决方案。在本研究中,我们采用NSGA-II算法[3]作为基础,构建了一个完整的神经网络架构搜索框架,并开发了一套全面的可视化工具,以更好地理解和分析搜索过程与结果。
2. 多目标进化神经网络架构搜索
2.1 NSGA-II算法基础
NSGA-II (Non-dominated Sorting Genetic Algorithm II) 是一种广泛使用的多目标优化算法,它通过非支配排序和拥挤度距离计算来平衡多个优化目标。在NAS中,我们通常考虑两个主要目标:
1. 最大化模型准确率
2. 最小化模型复杂度(如参数量)
我们的实现基于标准NSGA-II算法,但添加了针对神经网络架构特点的适应性变异和交叉操作。以下是核心NSGA-II演化过程的代码片段:
def evolve(self, fitness_function, generations=1):
"""执行NSGA-II进化"""
for _ in range(generations):
# 创建后代
offspring = self.create_offspring()
# 评估后代适应度
for individual in offspring:
individual.fitness = fitness_function(individual.genome)
# 合并种群和后代
combined = self.population + offspring
# 非支配排序
fronts = self.fast_non_dominated_sort(combined)
# 选择下一代种群
self.population = []
front_idx = 0
# 按照非支配等级添加个体
while len(self.population) + len(fronts[front_idx]) <= self.population_size:
# 计算拥挤度
self.calculate_crowding_distance(fronts[front_idx])
# 添加当前前沿的所有个体
self.population.extend(fronts[front_idx])
front_idx += 1
if front_idx == len(fronts):
break
# 如果需要,添加最后一个前沿的部分个体
if len(self.population) < self.population_size and front_idx < len(fronts):
# 按拥挤度排序
fronts[front_idx].sort(key=lambda x: x.crowding_distance, reverse=True)
# 添加拥挤度最大的个体
self.population.extend(
fronts[front_idx][:self.population_size - len(self.population)]
)
# 返回帕累托前沿(第一个非支配前沿)
return self.fast_non_dominated_sort(self.population)[0]2.2 架构编码与评估
在我们的框架中,每个神经网络架构都通过一个整数向量(基因组)进行编码,该向量定义了网络的各个方面,包括卷积层数量、卷积核大小、步长和全连接层单元数等。下面是基因组解码示例:
def decode_genome(genome: List[int]):
"""
解码基因组为神经网络架构
参数:
genome: 表示架构的整数向量
返回:
解码后的架构层列表
"""
layers = []
# 解析基因组
stage1_blocks = max(1, genome[0])
stage1_stride = 1 if genome[1] == 0 else 2
stage2_blocks = max(1, genome[2])
stage2_stride = 1 if genome[3] == 0 else 2
stage3_blocks = max(1, genome[4])
stage3_stride = 1 if genome[5] == 0 else 2
fc1_units = 16 * (2 ** (genome[6] % 6))
fc2_units = 16 * (2 ** (genome[7] % 6))
pool_type = "AVG Pool" if genome[8] % 2 == 1 else "MAX Pool"
dropout_rate = min(0.5, genome[9] * 0.1)
# 生成架构层定义
# 第一阶段卷积层
for i in range(stage1_blocks):
stride = 1
if i == stage1_blocks - 1 and stage1_stride > 1:
stride = stage1_stride
layers.append({
'type': 'conv',
'filters': 16,
'kernel_size': 3,
'stride': stride
})
# 其他层...(省略部分代码)
return layers每个架构通过评估函数进行评估,该函数构建神经网络模型,在数据集上进行简短训练,并返回准确率和参数数量。这两个指标构成了每个架构的适应度值。
3. 高级可视化技术
可视化是理解复杂算法和数据的关键工具。在本研究中,我们开发了一系列高级可视化技术,以展示进化算法的搜索过程和结果。以下是我们实现的几种关键可视化方法:
3.1 帕累托前沿可视化
帕累托前沿显示了在多个目标之间的最优权衡关系。在我们的NAS框架中,它展示了模型准确率与参数量之间的关系,帮助研究人员选择符合特定需求的架构。
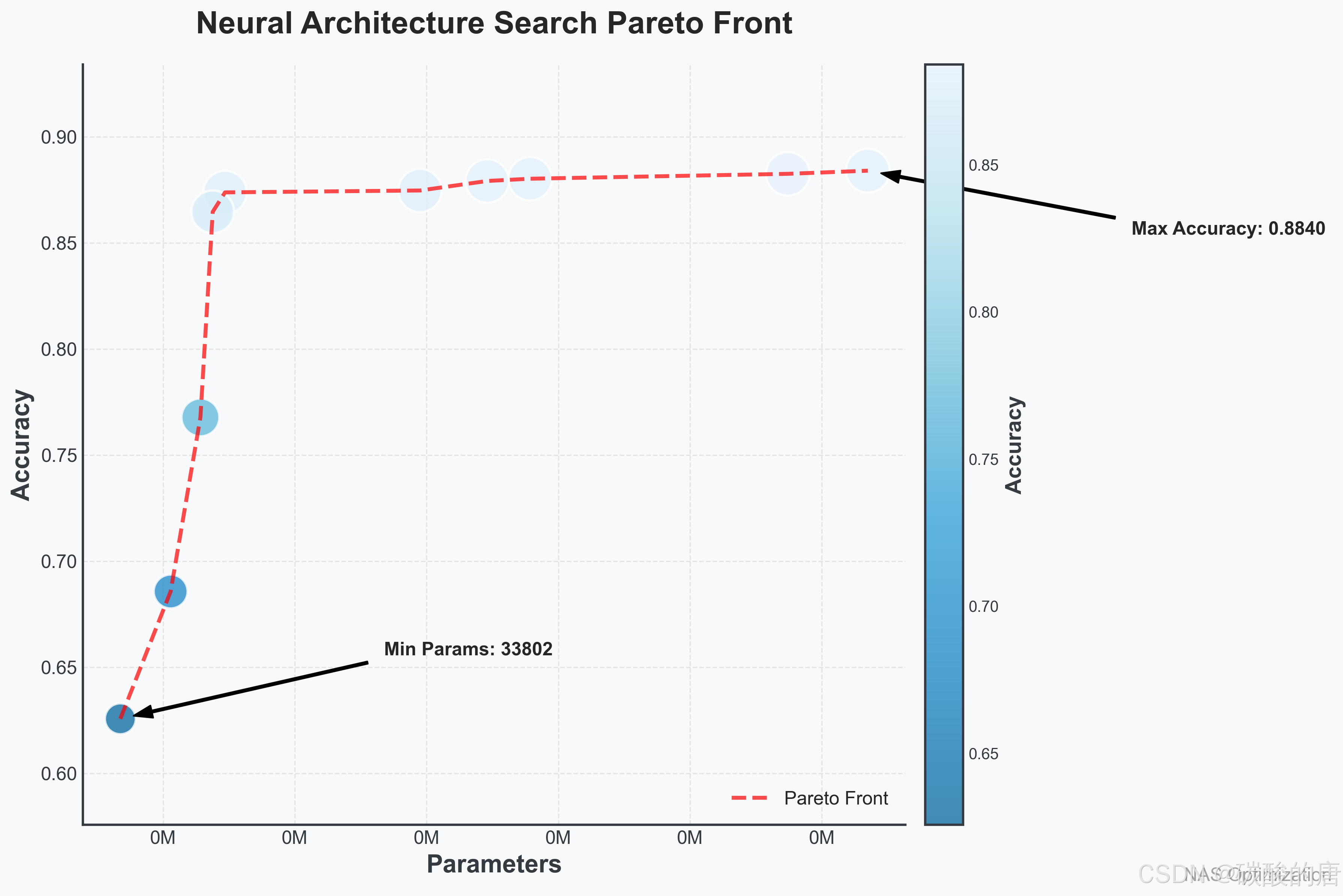
上图展示了搜索过程中发现的最优架构集合。每个点代表一个神经网络架构,横轴表示参数数量(百万),纵轴表示准确率。颜色深浅表示架构的帕累托等级,最前沿的点(深色)构成帕累托前沿。此可视化帮助我们理解在准确率和模型复杂度之间的权衡关系。
实现该可视化的核心代码如下:
def plot_pareto_front(population, save_path=None, show=True):
"""
绘制增强的帕累托前沿可视化
参数:
population: 个体列表(帕累托前沿)
save_path: 保存图像的路径
show: 是否显示图像
"""
# 提取适应度值
accuracies = [ind.fitness[0] for ind in population]
parameters = [-ind.fitness[1] for ind in population]
# 创建图形
plt.figure(figsize=(12, 8), dpi=120)
# 创建散点图
scatter = plt.scatter(
parameters,
accuracies,
c=range(len(parameters)),
cmap=pareto_cmap,
s=[100 + acc * 200 for acc in accuracies],
alpha=0.7,
edgecolors='black',
linewidths=1
)
# 添加帕累托前沿线
sorted_points = sorted(zip(parameters, accuracies), key=lambda x: x[0])
max_acc = 0
pareto_points = []
for param, acc in sorted_points:
if acc > max_acc:
max_acc = acc
pareto_points.append((param, acc))
if pareto_points:
pareto_x, pareto_y = zip(*pareto_points)
plt.plot(pareto_x, pareto_y, 'r--', linewidth=2)
# 设置轴标签和标题
plt.xlabel('Parameters (Millions)', fontsize=14, fontweight='bold')
plt.ylabel('Accuracy', fontsize=14, fontweight='bold')
plt.title('Pareto Front - Architecture Search Results', fontsize=16, fontweight='bold')
# 添加高亮标注
if accuracies:
# 标注最高准确率点
max_acc_idx = accuracies.index(max(accuracies))
plt.scatter(parameters[max_acc_idx], accuracies[max_acc_idx], s=200,
c='gold', edgecolors='black', linewidths=2, zorder=5)
plt.annotate(f'Best Acc: {accuracies[max_acc_idx]:.4f}',
xy=(parameters[max_acc_idx], accuracies[max_acc_idx]),
xytext=(10, 10), textcoords='offset points',
fontsize=12, fontweight='bold')
# 标注最低参数量点
min_param_idx = parameters.index(min(parameters))
plt.scatter(parameters[min_param_idx], accuracies[min_param_idx], s=200,
c='lightgreen', edgecolors='black', linewidths=2, zorder=5)
plt.annotate(f'Min Params: {parameters[min_param_idx]/1000000:.2f}M',
xy=(parameters[min_param_idx], accuracies[min_param_idx]),
xytext=(10, -20), textcoords='offset points',
fontsize=12, fontweight='bold')
# 添加网格和图例
plt.grid(True, linestyle='--', alpha=0.7)
cbar = plt.colorbar(scatter, label='Pareto Rank')
# 保存和显示图像
if save_path:
os.makedirs(os.path.dirname(save_path), exist_ok=True)
plt.savefig(save_path, dpi=300, bbox_inches='tight')
if show:
plt.show()
else:
plt.close()3.2 进化过程轨迹可视化
进化过程可视化展示了算法在搜索过程中如何提高模型性能并优化模型复杂度。这有助于理解算法的收敛特性和探索-利用平衡。
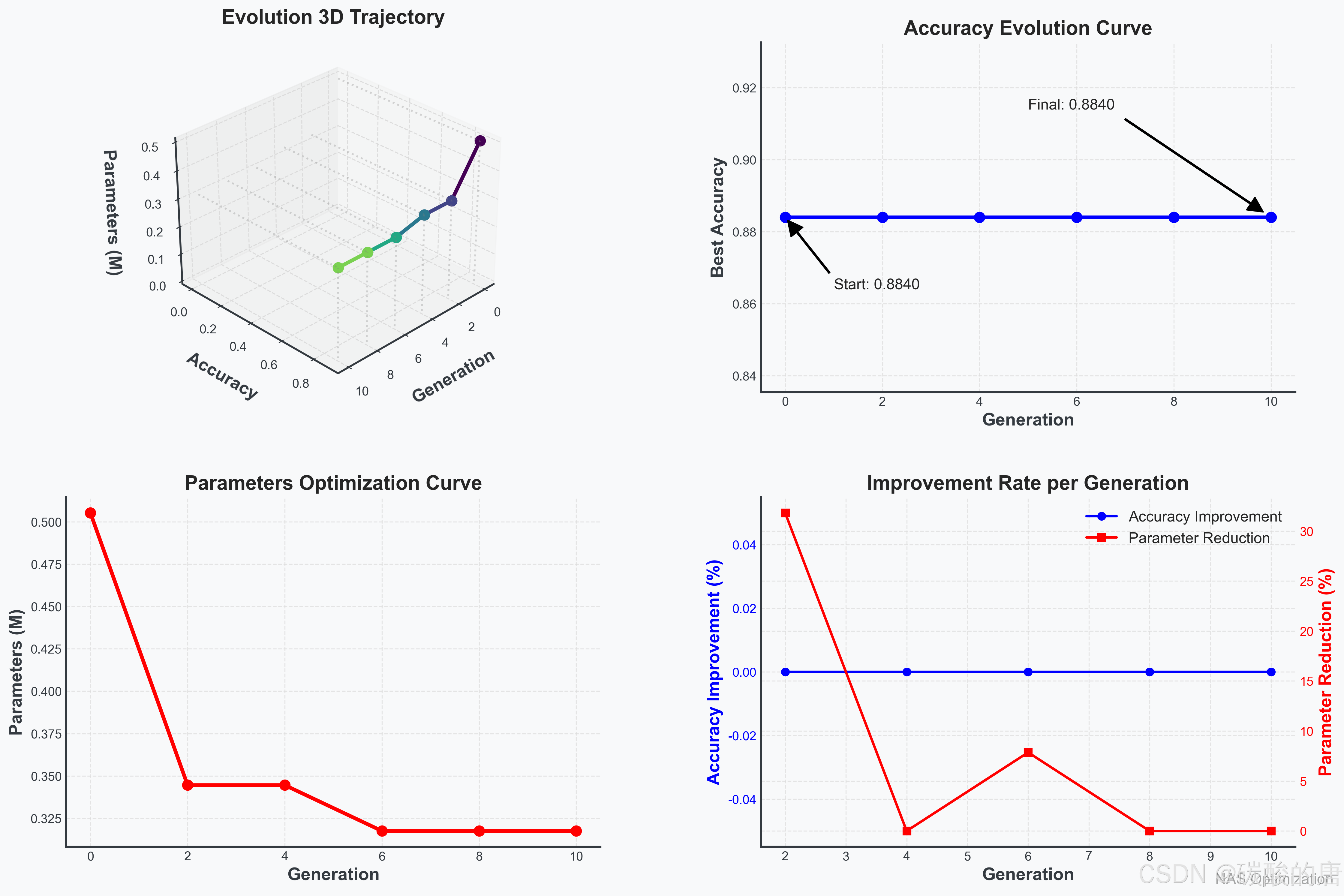
上图展示了进化过程中最佳准确率和参数量的变化趋势。左侧图表显示了准确率随代数的变化,右侧显示了参数量的变化。这种可视化帮助我们理解进化算法如何随时间优化多个目标,并评估收敛速度。
3.3 架构3D可视化
为了更直观地理解网络结构,我们开发了一个3D可视化工具,它可以展示神经网络的层次结构和连接方式。
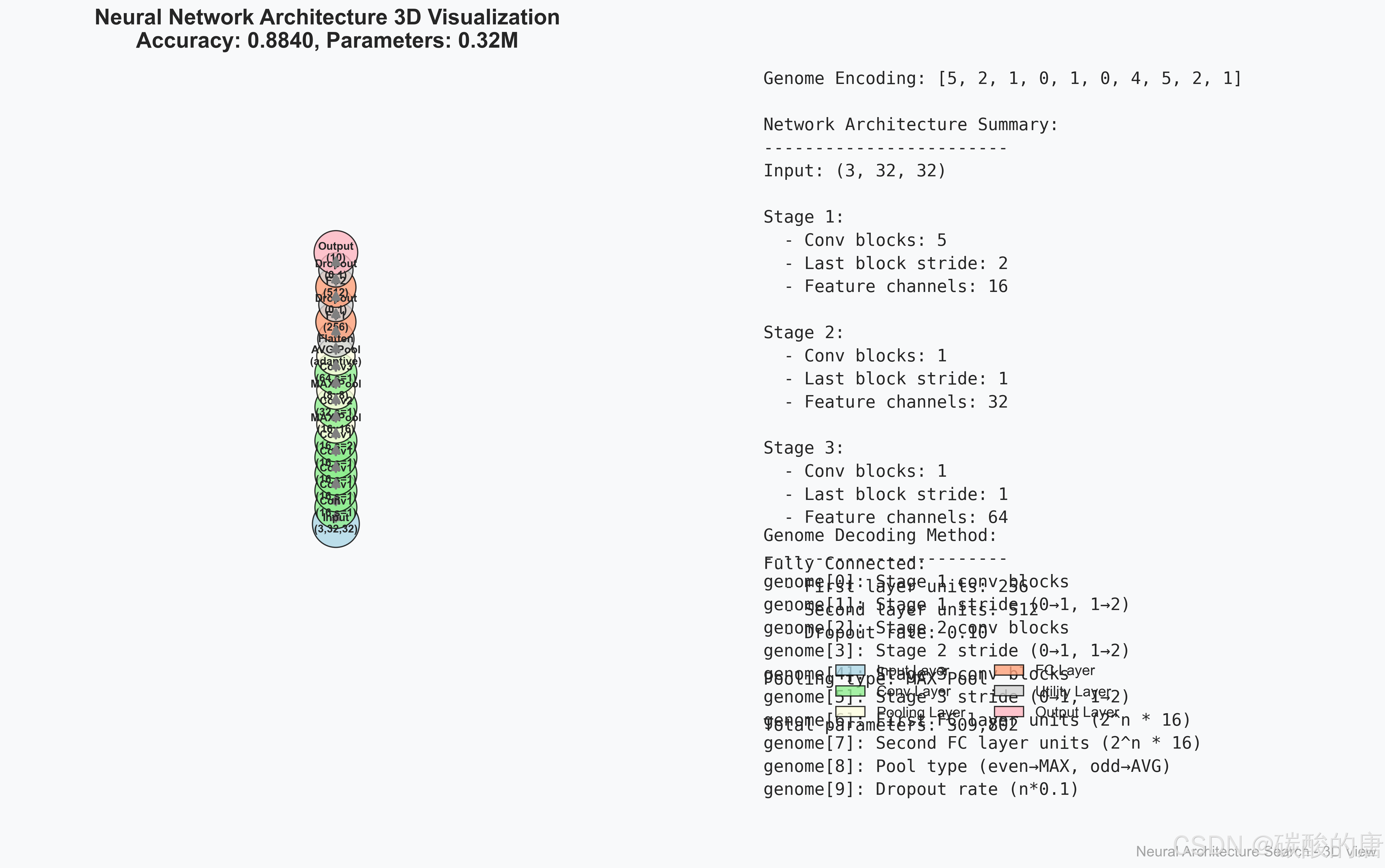
上图展示了准确率最高的架构的3D可视化。左侧是网络结构的3D表示,不同颜色代表不同类型的层:蓝色为输入层,绿色为卷积层,黄色为池化层,红色为全连接层,粉色为输出层。右侧显示了详细的架构信息,包括基因组编码、参数数量和每层配置。
3.4 模型比较可视化
为了比较不同架构的性能,我们开发了模型比较可视化工具,它可以同时比较多个模型的准确率、参数量和其他指标。
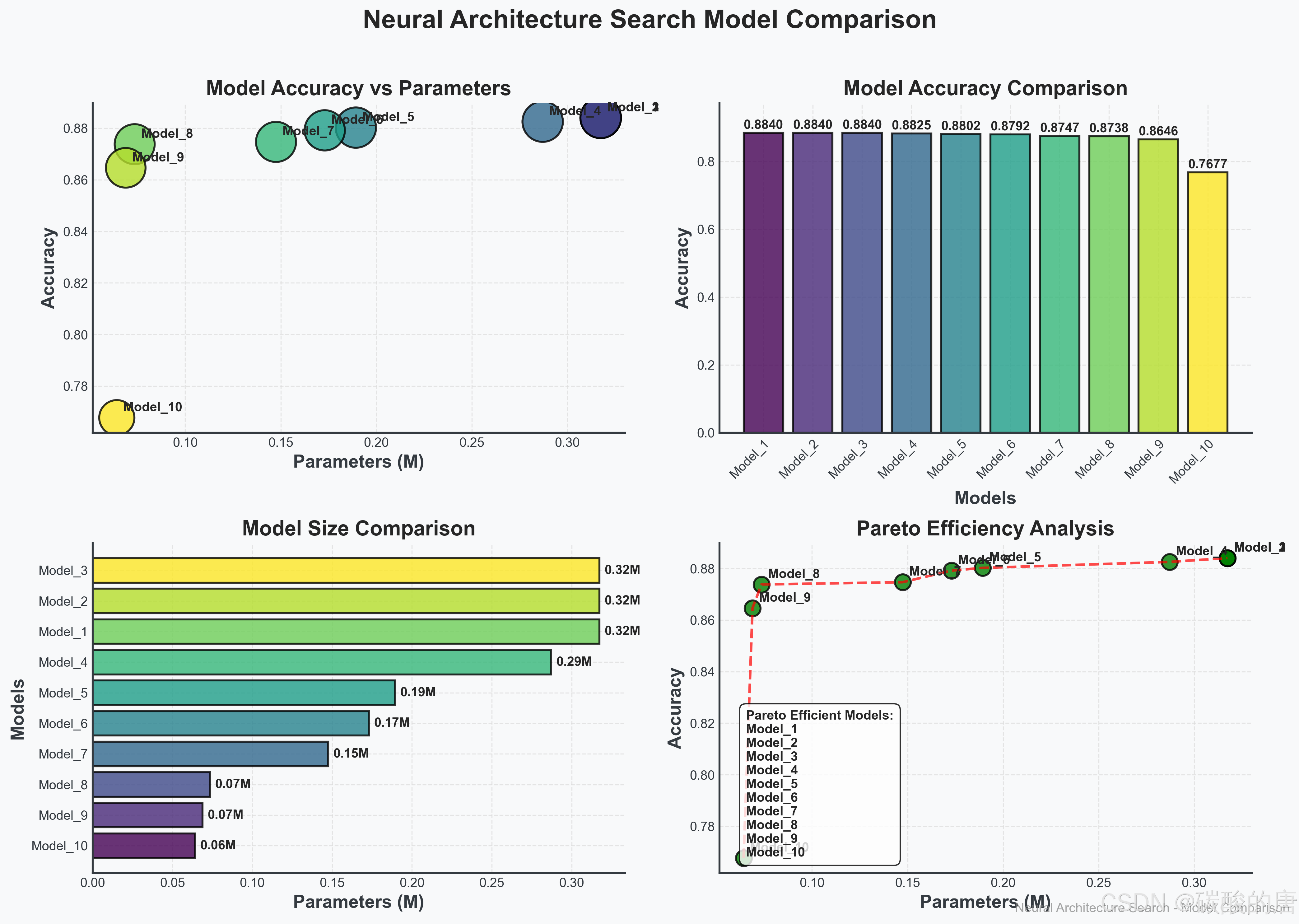
上图包含四个子图:左上角是准确率与参数量的散点图,右上角是各模型准确率的条形图,左下角是参数量分布图,右下角是帕累托效率分析。这种可视化能够全面比较不同架构的优缺点,帮助研究人员选择最适合特定需求的模型。
4. 实验结果与分析
我们在CIFAR-10数据集上运行了神经网络架构搜索实验,种群大小为20,进化代数为10。实验结果表明,即使在有限的搜索空间和计算资源下,我们的方法也能够发现多个性能良好的架构。
从帕累托前沿可视化中可以看出,我们发现了多种不同参数量和准确率的架构。最高准确率为88.40%,参数量为317,466;最低参数量为64,186,准确率为76.77%。这些结果展示了多目标优化的价值,允许用户根据特定需求(如准确率优先或参数量优先)选择合适的架构。
进化过程可视化显示,算法在早期迭代中快速提升准确率,并随后通过微调降低参数量。3D架构可视化则清晰展示了不同架构的结构特点,包括卷积层分布和连接模式。
5. 讨论与未来工作
本研究展示了多目标进化算法在神经网络架构搜索中的应用,并强调了可视化技术在理解复杂搜索过程中的重要性。通过结合先进的可视化方法,我们能够更好地理解算法行为和搜索结果,为未来研究提供新的视角。
未来工作将从以下几个方面扩展:
- 扩大搜索空间,包括更多类型的操作和连接方式
- 加入更多优化目标,如推理时间和能耗
- 开发更多交互式可视化工具,支持在线探索和分析
- 集成先进的知识蒸馏技术,加速评估过程
6. 结论
本文介绍了一种基于NSGA-II多目标进化算法的神经网络架构搜索方法,并开发了一系列高级可视化技术,帮助研究人员更好地理解和分析搜索过程与结果。实验表明,我们的方法能够在准确率和参数量之间取得良好的平衡,并通过可视化技术提高搜索过程的透明度和可解释性。
这些可视化技术不仅适用于神经网络架构搜索,也可以扩展到其他进化计算和机器学习任务中,为算法行为分析和结果理解提供新的途径。
参考文献
[1] Elsken, T., Metzen, J. H., & Hutter, F. (2019). Neural architecture search: A survey. Journal of Machine Learning Research, 20(55), 1-21.
[2] Zoph, B., & Le, Q. V. (2017). Neural architecture search with reinforcement learning. International Conference on Learning Representations (ICLR).
[3] Deb, K., Pratap, A., Agarwal, S., & Meyarivan, T. A. M. T. (2002). A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE transactions on evolutionary computation, 6(2), 182-197.
[4] Lu, Z., Whalen, I., Boddeti, V., Dhebar, Y., Deb, K., Goodman, E., & Banzhaf, W. (2019). NSGA-Net: neural architecture search using multi-objective genetic algorithm. In Proceedings of the Genetic and Evolutionary Computation Conference (pp. 419-427).
[5] Pham, H., Guan, M. Y., Zoph, B., Le, Q. V., & Dean, J. (2018). Efficient neural architecture search via parameter sharing. International Conference on Machine Learning (ICML).
[6] Guo, Y., Zheng, Y., Tan, M., Chen, Q., Chen, J., Zhao, P., & Huang, J. (2020). NAT: Neural architecture transformer for accurate and compact architectures. Advances in Neural Information Processing Systems, 33, 737-748.


















 557
557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











