






背景介绍
所有的3d扫描仪,扫描生成点云后,都需要进行点云处理,以便于后续任务提取信息。自动驾驶激光雷达扫描的点云,也需要进行点云处理,然后再进行目标检测、轨迹规划等任务。实际做3d项目时,对于点云的处理,也是必不可少的一环。
PCL(Point Cloud Library)作为在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等,并支持跟QT联合开发。因此,对PCL点云库的掌握,是一个3d视觉(点云)工程师基本的基本素养之一。下述是一些专职的工作:


对于一些点云处理进阶的工作,精通PCL点云库也是基本要求:

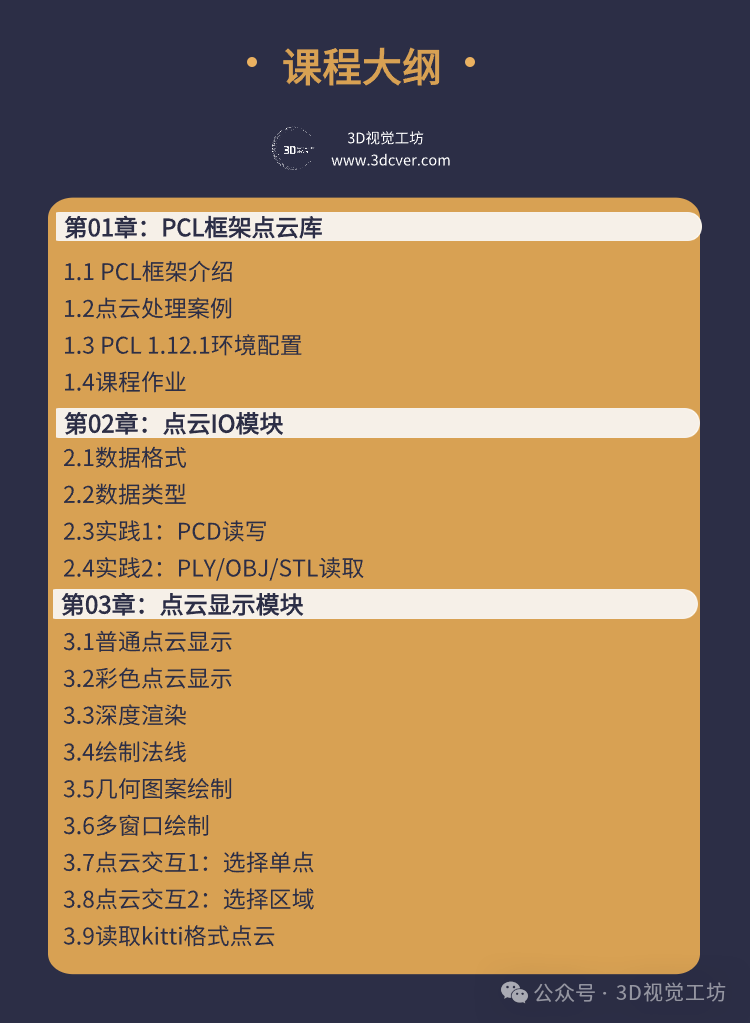
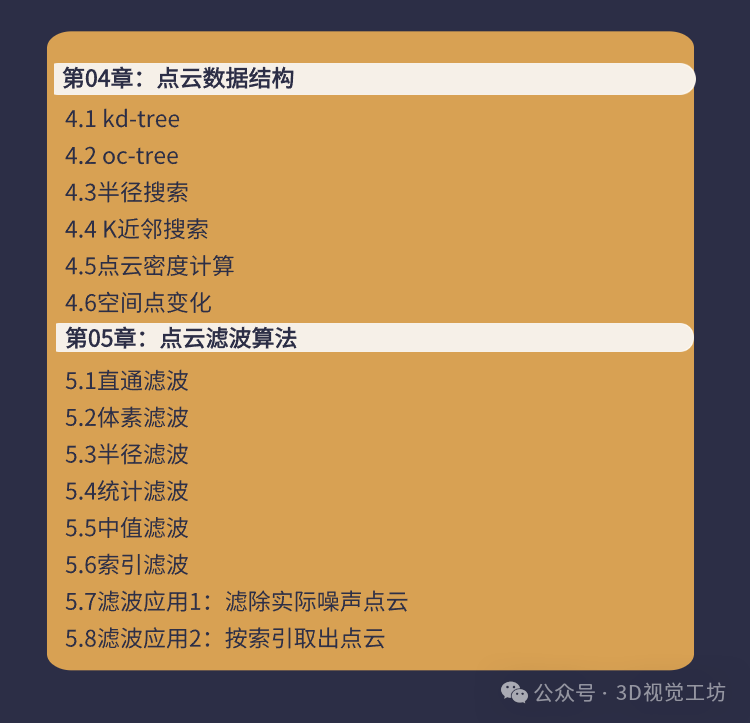
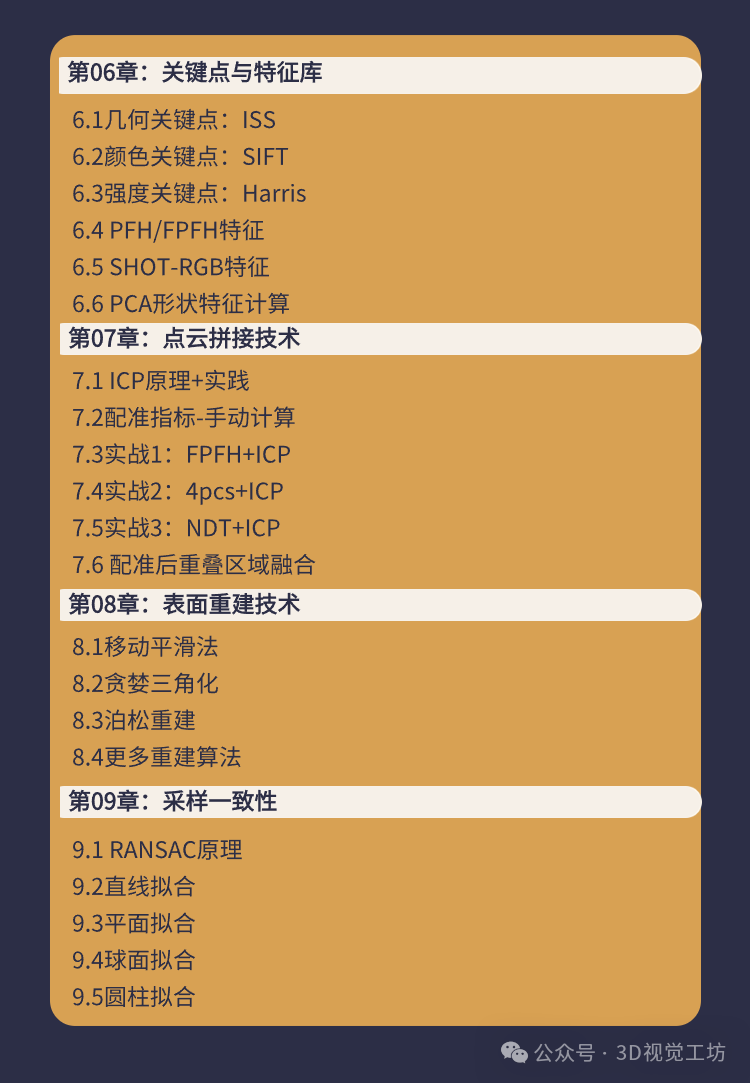
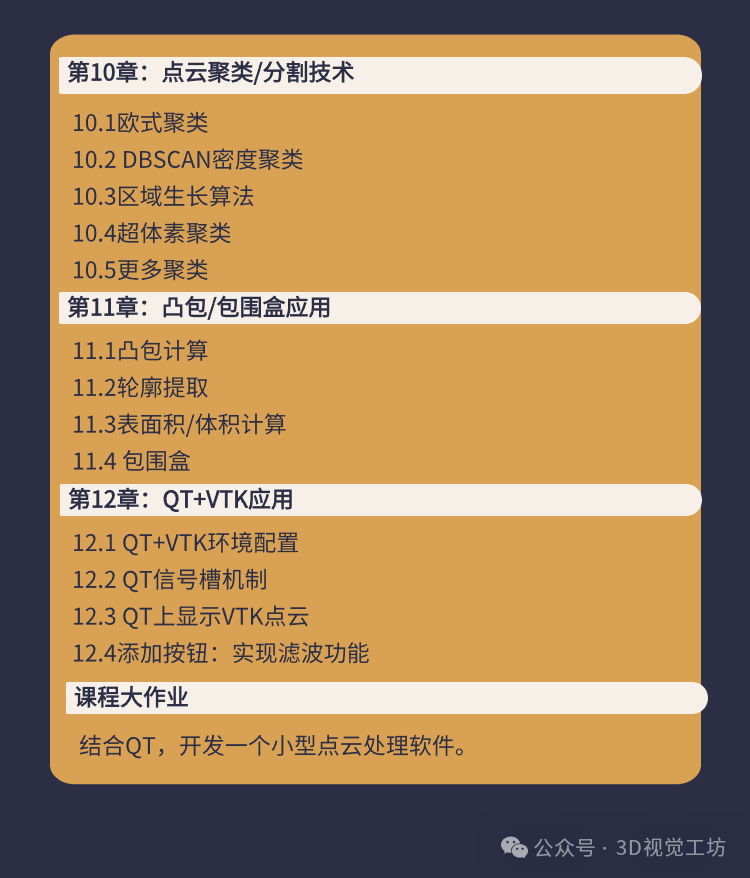
课程大纲
我们的课程有将近50个PCL点云库的demo应用,覆盖了PCL的大多数模块,并且结合QT-VTK,在QT上显示、处理点云,便于大家完整学习整个PCL点云库,课程大纲如下:
时间安排
注:上课时间为每周日晚上八点;如遇法定节假日等,将会在课程微信群另行通知!
课件展示
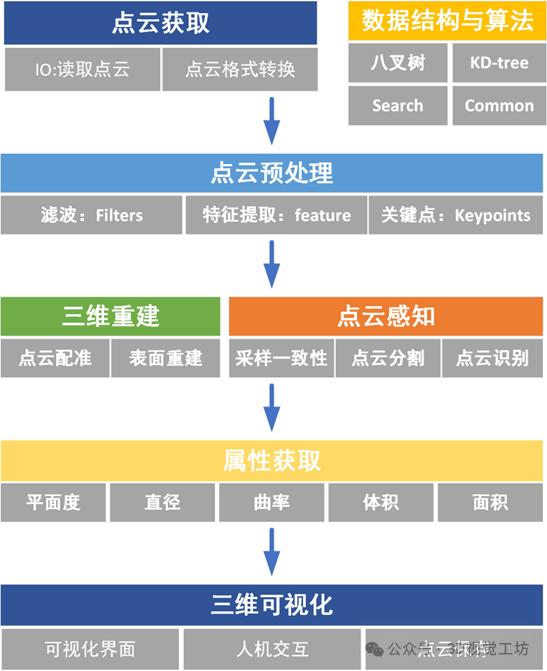
图1点云处理大纲
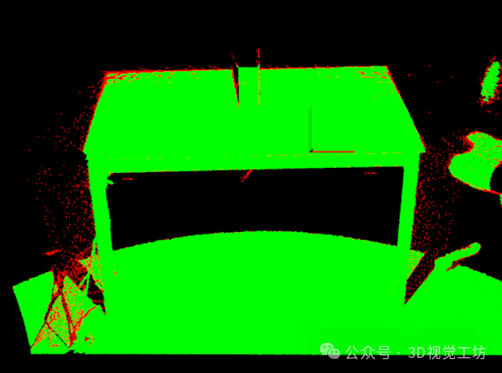
图2点云滤波(红色是噪声点)

图3关键点(红色是关键点)
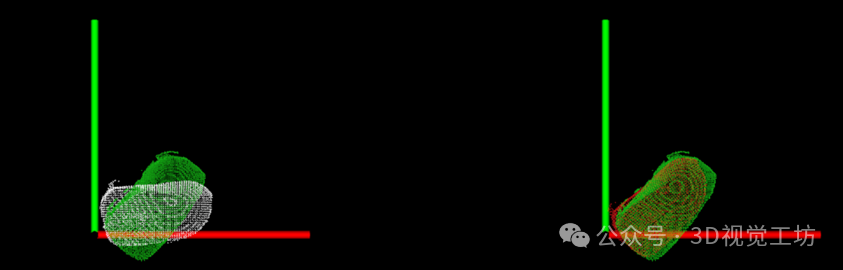
图4点云配准
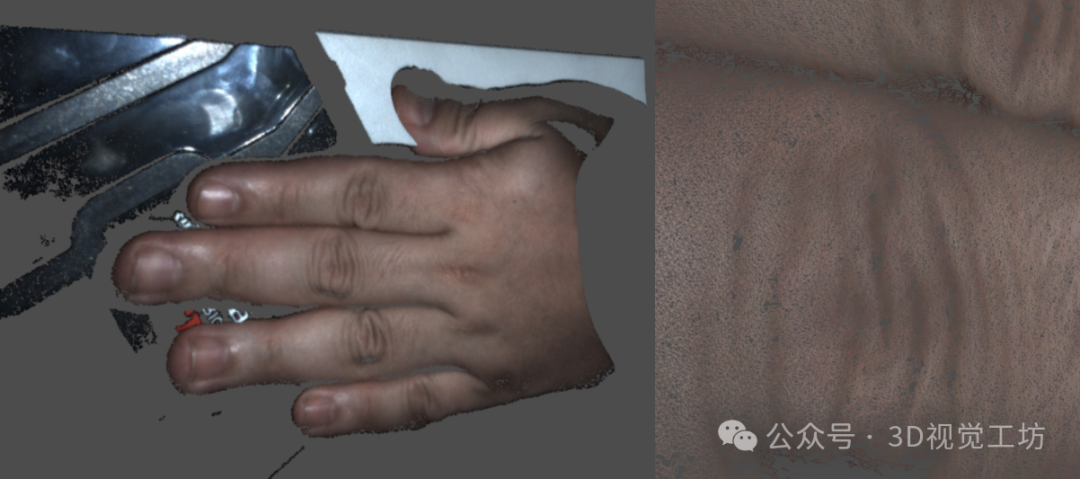
图5表面三角化
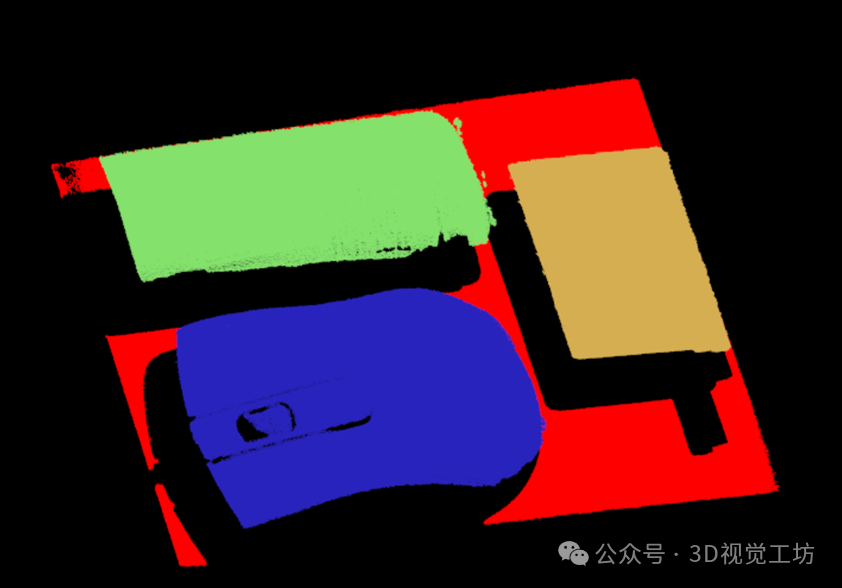
图6点云分割
面向人群
1.刚入门点云PCL库技术的本科生、硕士生
2.需要一定进阶的一线算法工程人员
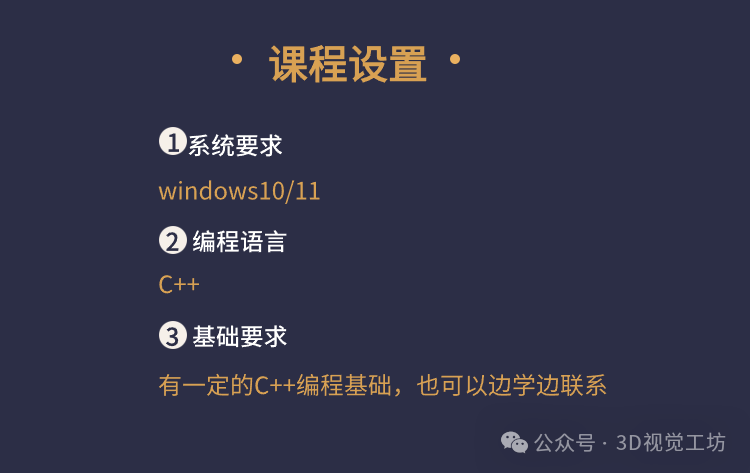
3.有一定C++编程基础
学后收获
1.对PCL点云库技术的各个模块有较为深刻的理解
2.面向工业级实现,所学内容对标相关岗位要求
3.快速掌握QT+VTK技术
课程答疑
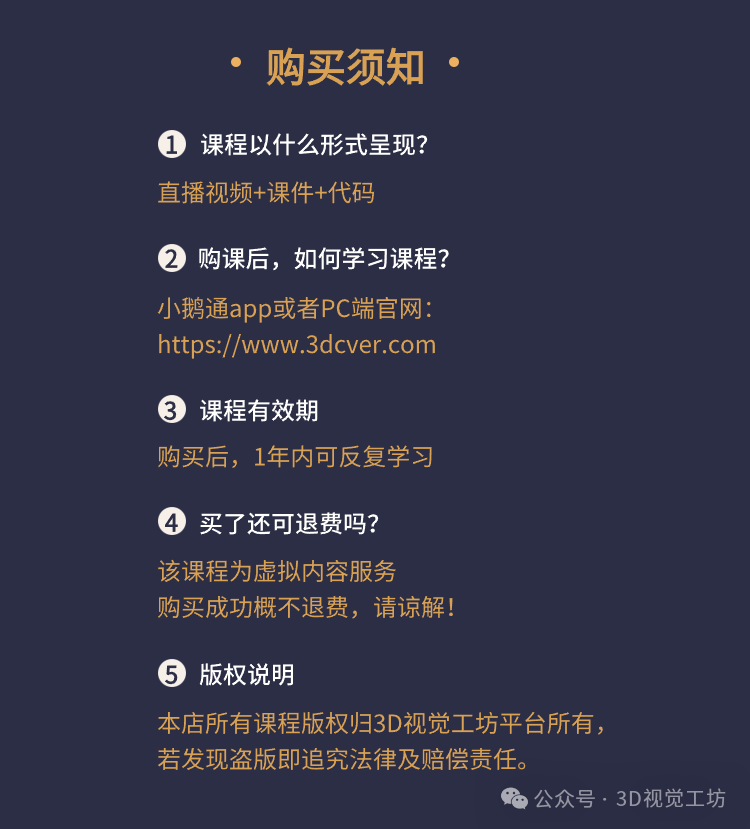
本课程答疑主要在本课程对应的鹅圈子中答疑,学员学习过程中,有任何问题,可以随时在鹅圈子中提问。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









