






 本文介绍了受麻雀觅食行为启发的群智能优化算法SSA,以及其融合正余弦和柯西变异的改进版本SCSSA。文章通过在CEC2005测试集上的实验展示了这两种算法在机器人路径规划中的性能,并探讨了群智能算法的实际意义,特别是解决复杂环境中的路径优化问题。
本文介绍了受麻雀觅食行为启发的群智能优化算法SSA,以及其融合正余弦和柯西变异的改进版本SCSSA。文章通过在CEC2005测试集上的实验展示了这两种算法在机器人路径规划中的性能,并探讨了群智能算法的实际意义,特别是解决复杂环境中的路径优化问题。
麻雀搜索算法(Sparrow Search Algorithm,SSA)是一种受麻雀觅食行为启发的群智能优化算法,在麻雀的觅食过程中,个体通常被分为探索者和追随者。探索者在种群中负责寻找食物并为整个麻雀种群提供觅食区域和方向,而追随者则是利用探索者来获取食物。此外,当麻雀种群意识到危险时,会进行反捕食行为。在SSA中,具有较好适应度值的探索者在搜索过程中会优先获取食物。由于探索者负责为整个麻雀种群寻找食物并为所有追随者提供觅食的方向,因此,探索者可以获得比追随者更大的觅食搜索范围。此外,个体之间会相互监视,麻雀种群中的追随者为了提高自身的捕食率,通常会争夺高摄取量同伴的食物资源。在觅食的同时,所有个体均会对周围环境保持警惕以防天敌的到来。一旦麻雀发现天敌,即发出鸣叫作为报警信号。当报警值大于安全值时,探索者将会引导追随者到其它安全区域进行觅食。
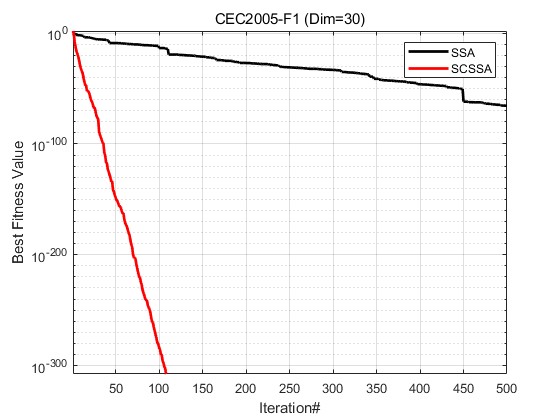
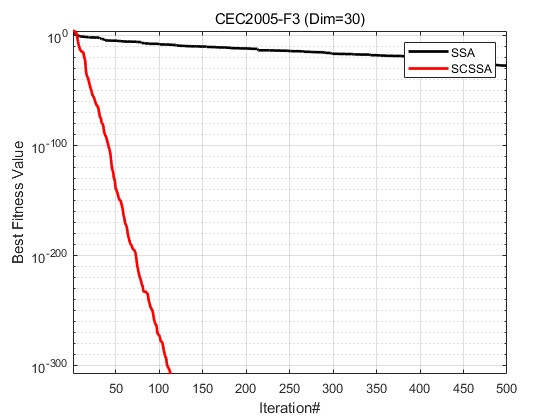
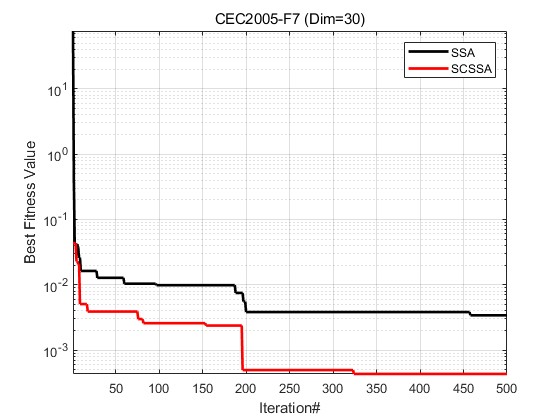
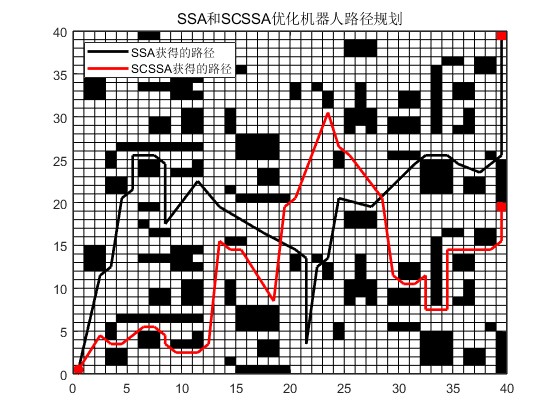
融合正余弦和柯西变异的麻雀搜索算法(SCSSA)是关于SSA的改进版本,为了更好地体现改进效果,将两个算法在CEC2005测试集的23个经典测试函数上进行实验对比。接下来我们将运用它们在机器人路径规划上面,体现算法解决实际问题的能力。突出研究群智能算法的实际意义。机器人路径规划是在给定环境中找到机器人从起点到目标点的最佳路径的过程,涉及地图建模、状态空间表示、路径搜索算法、碰撞检测和实时更新等步骤。其目标是寻找安全高效、符合约束条件的路径,使机器人能够在复杂环境中移动或执行任务。
在CEC2005测试集上的部分实验结果如下:


路径优化实验结果如下:
部分主函数代码如下:
clc;clear;close all
% 地图
G = [0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0;
0 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0;
0 1 1 0 0 0 1 1 1 1 1 0 0 0 0 0 0 0 0 0;
0 1 1 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0;
0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 1 1 1 1 0;
0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0;
0 0 0 1 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 0 1 1 1 0 0 0 0 0 1 1 0;
0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0;
0 0 0 1 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1;];
G = [G';G];
G=[G';G'];
num = size(G,1);
for i=1:num/2
for j=1:num
m=G(i,j);
n=G(num+1-i,j);
G(i,j)=n;
G(num+1-i,j)=m;
end
end
%%
S = [1 1];
E = [num num];
G0 = G;
G = G0(S(1):E(1),S(2):E(2));
[Xmax,dimensions] = size(G); X_min = 1;
dimensions = dimensions - 2; 














 27
27











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









