






相机标定--坐标转换
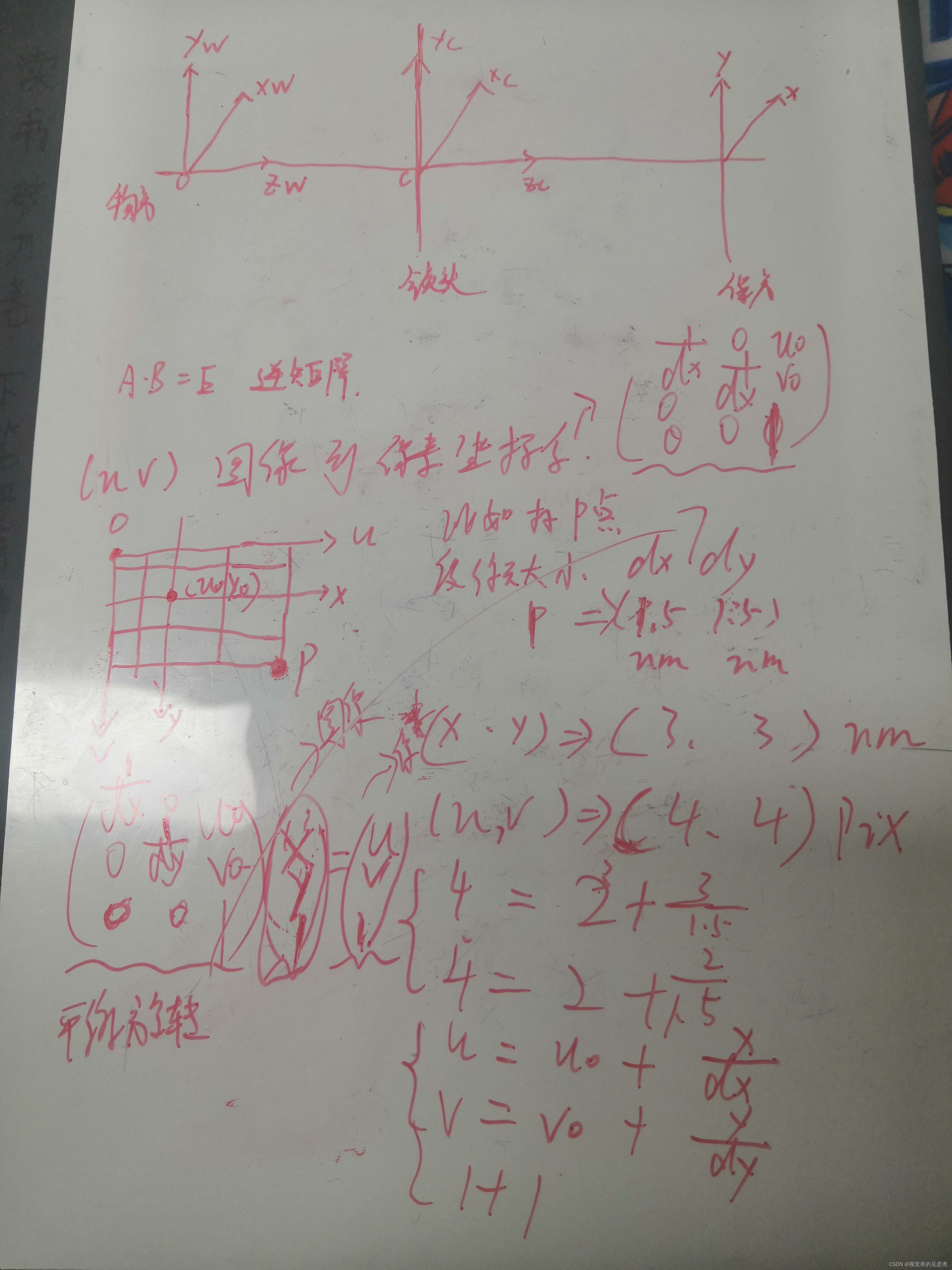
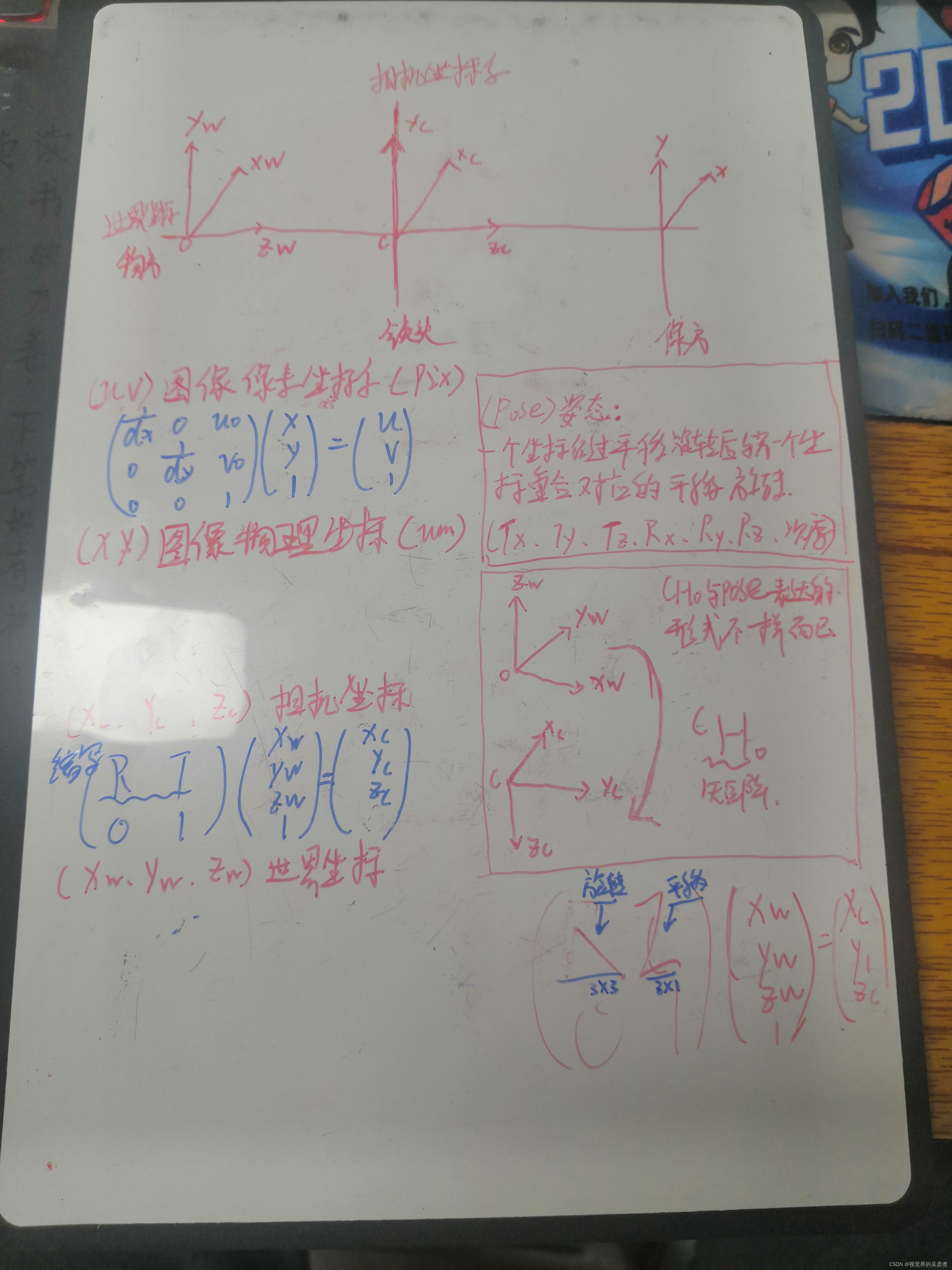
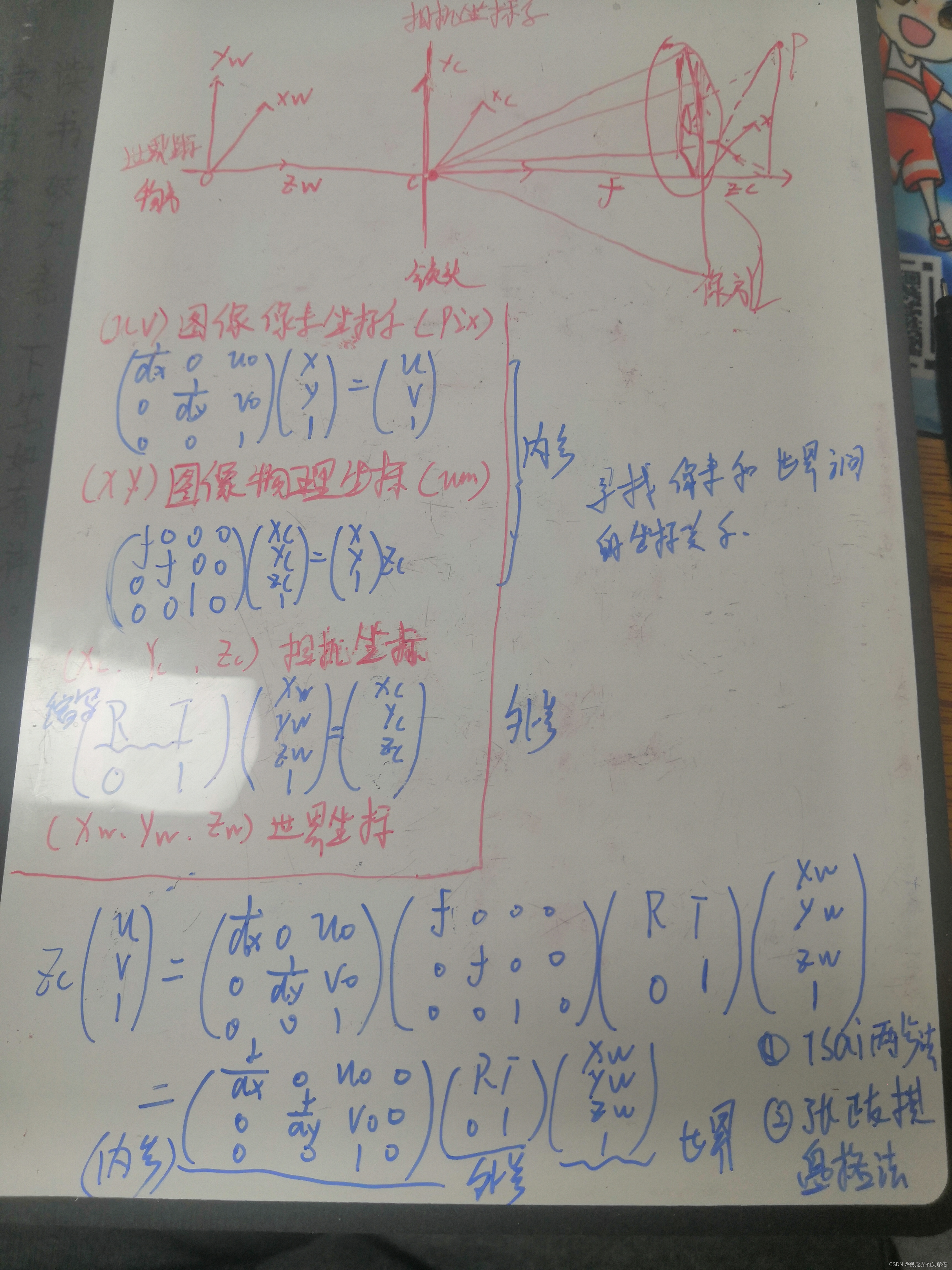
1.图像物理坐标转为像素坐标(之间的关系本质为旋转平移矩阵)
2.世界坐标转化为相机坐标(本质上是坐标的旋转平移矩阵)
3.相机坐标转化为图像物理坐标(小孔成像原理和相似三角形)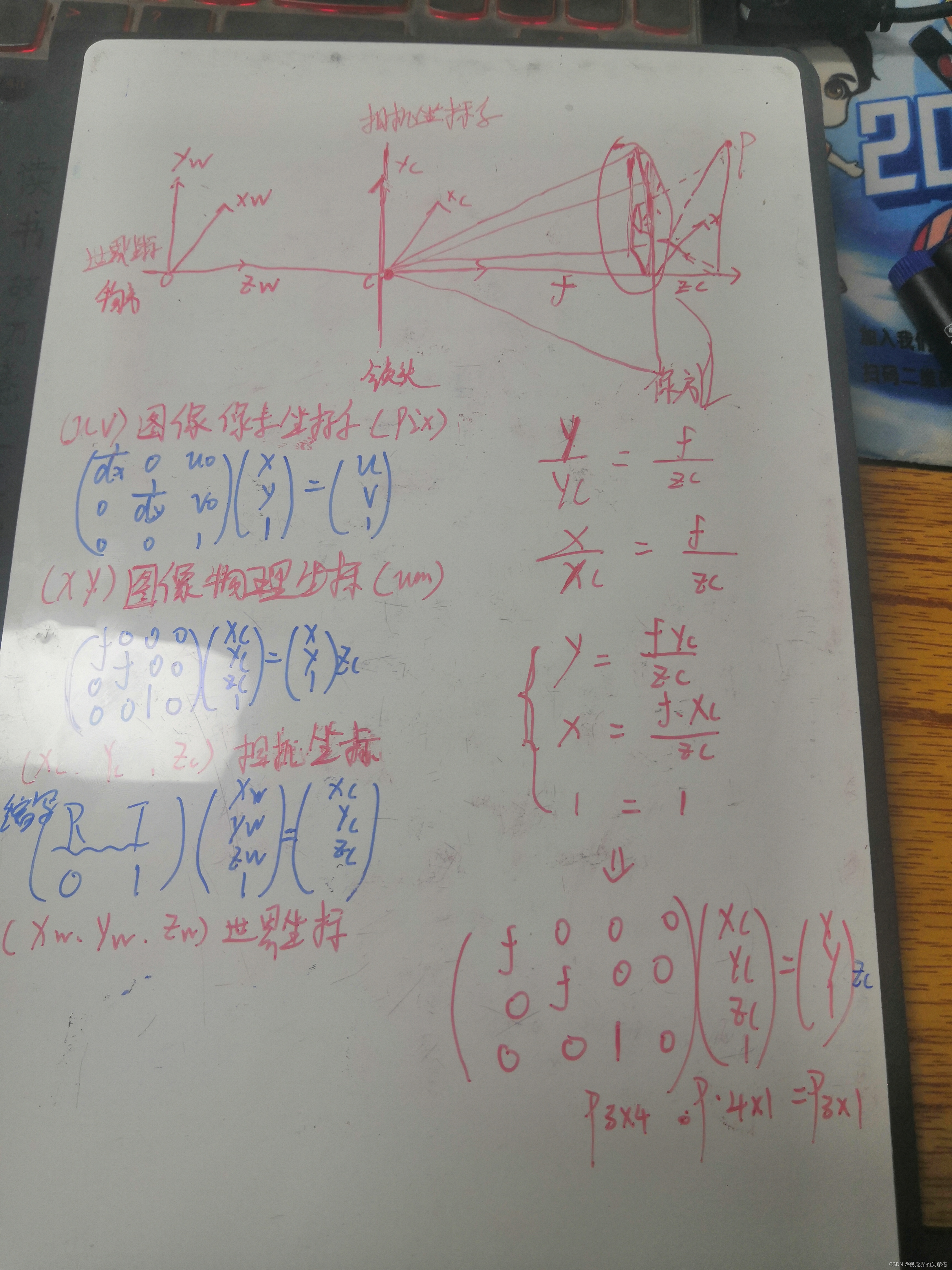
帮助理解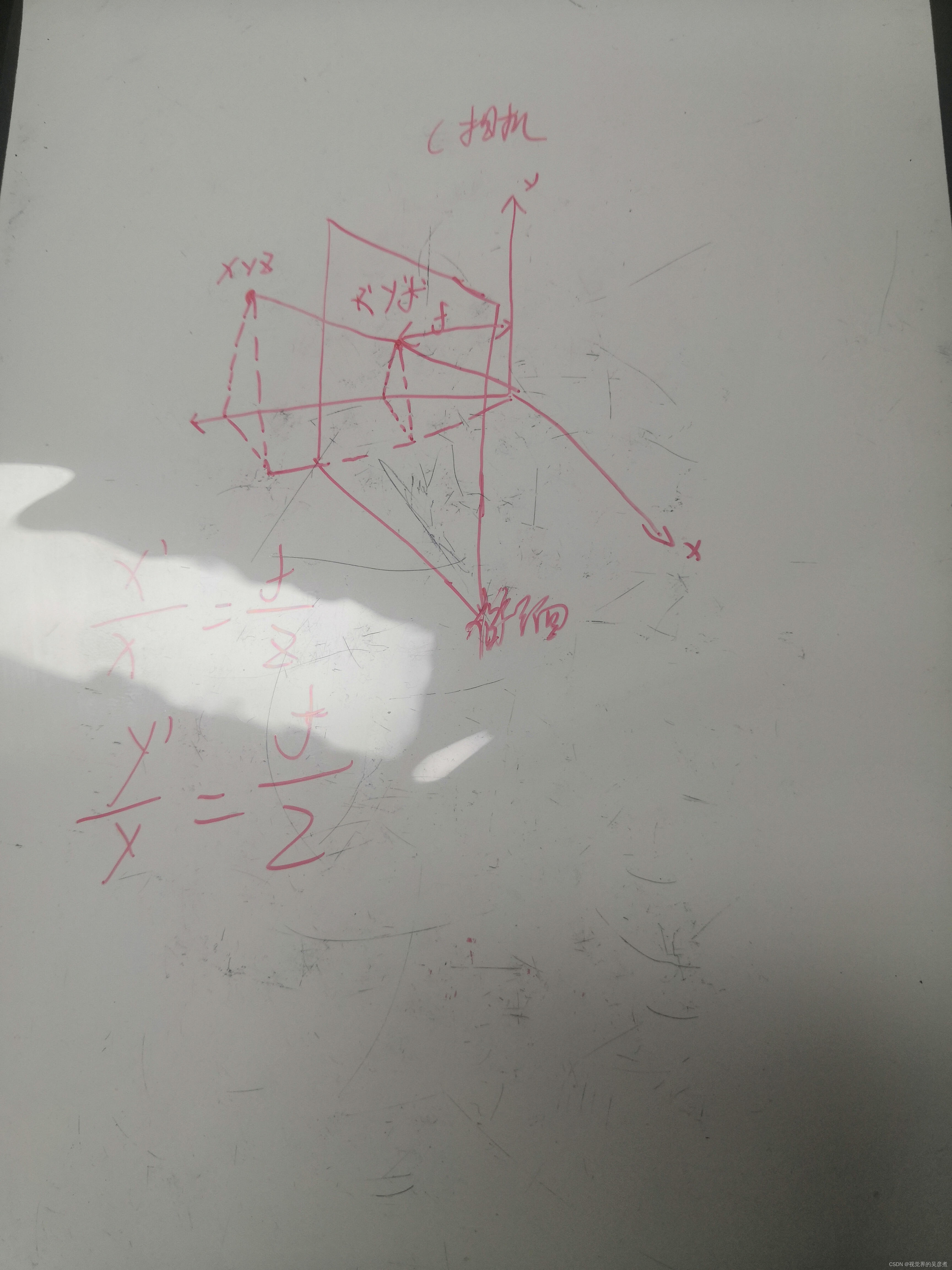
4.综上可表达
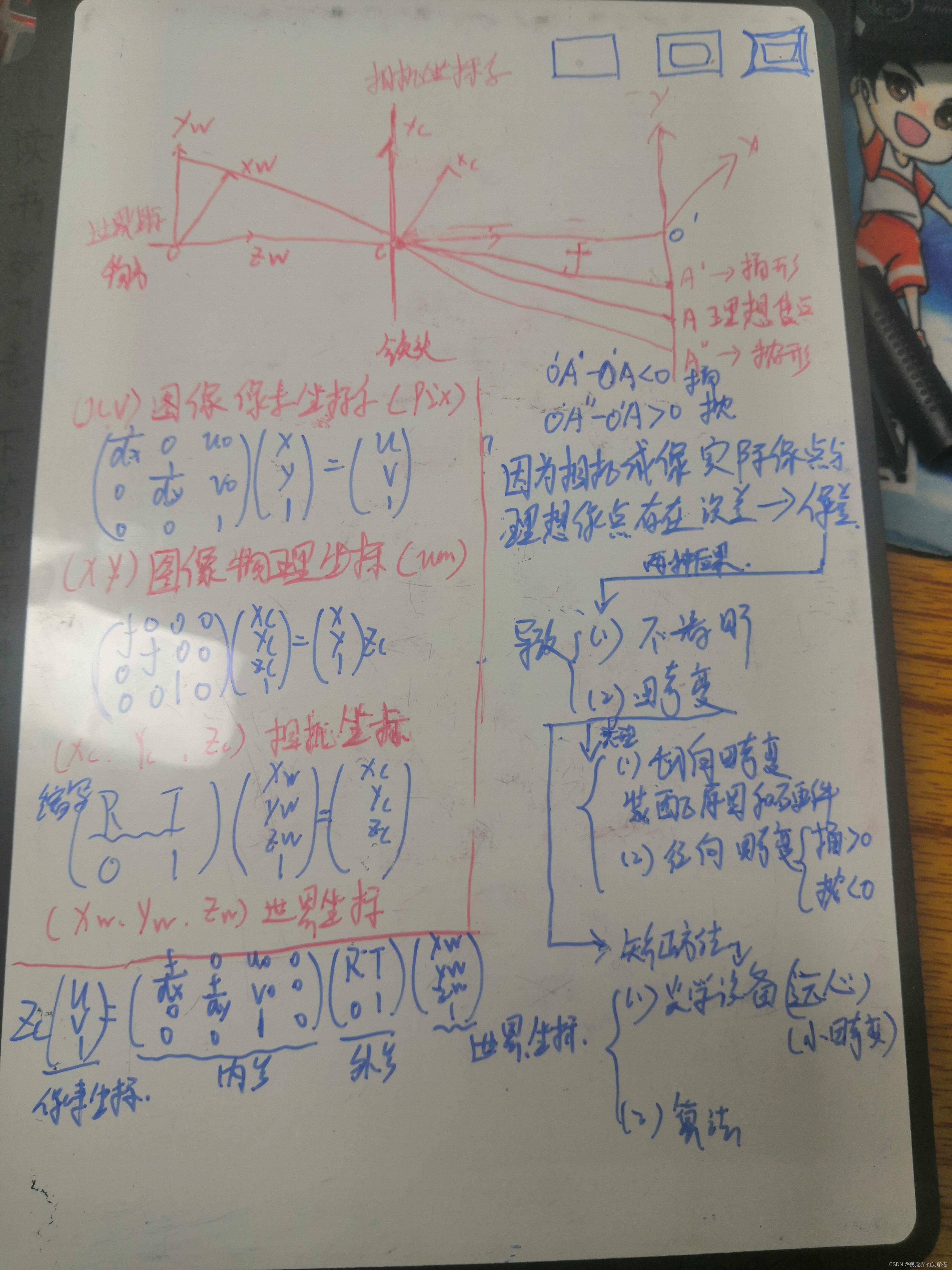
5.因为相机拍的像会有误差主要是想像差,所以矩阵必须乘一个畸变系数。
相机标定--坐标转换
1.图像物理坐标转为像素坐标(之间的关系本质为旋转平移矩阵)
2.世界坐标转化为相机坐标(本质上是坐标的旋转平移矩阵)
3.相机坐标转化为图像物理坐标(小孔成像原理和相似三角形)
帮助理解
4.综上可表达
5.因为相机拍的像会有误差主要是想像差,所以矩阵必须乘一个畸变系数。
 1万+
2157
1万+
2157











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























