








作者 | 碧血剑
出品 | 车规半导体硬件

一、智能驾驶的基石
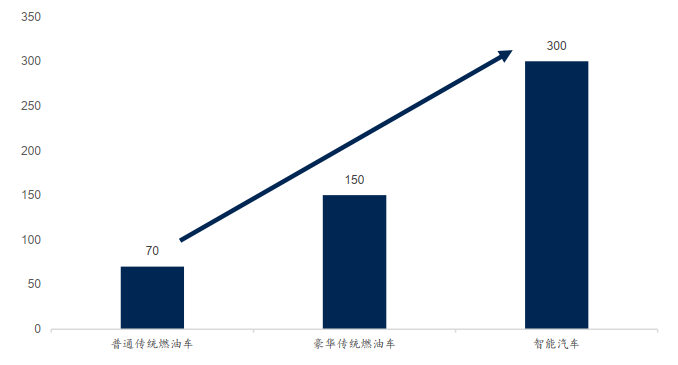
随着汽车智能化程度的逐渐提高,对高性能 SoC 芯片的需求不断提升,主控芯片是所有环节中壁垒最高、商业模式最佳的环节;此外,当前汽车芯片出货量过小, 无法充分摊销前期高昂的研发成本。种种因素注定了, SoC 主控芯片一定是长期极其稀缺的赛道,也是只属于少数玩家的游戏,英伟达、高通、英特尔等国际巨头持续发力芯片赛道,国内方面,华为、地平线等正在不断追赶。
稀缺性原因:
技术壁垒高:SoC主控芯片作为汽车智能化的核心,集成了CPU、GPU、NPU(神经网络处理器)等多种处理器,以及大量的IP核和接口,其设计、制造和测试难度极大,技术门槛高。
研发投入大:由于技术复杂,SoC主控芯片的研发需要巨额的资金投入,且研发周期长,风险高。而当前汽车芯片出货量相对较小,难以在短期内通过大规模销售来摊销高昂的研发成本。
定制化需求:不同汽车厂商对SoC主控芯片的需求各异,需要芯片供应商提供定制化的解决方案,这进一步增加了研发和生产的难度。
随着汽车软件权重的不断提升,应用软件已成为汽车品牌智能化的直接体现。通过定制化和差异化的核心功能和算法,汽车厂商可以打造独特的用户体验,增强品牌竞争力,占领消费者心智。
对于底层相对标准的系统软件和功能软件,以及相应的工具链等产品,独立的软件方案商具有显著优势和规模效应。这些软件方案商能够提供标准化的解决方案,降低汽车厂商的开发成本和时间,同时保证软件的质量和稳定性。

车载计算平台是智能网联汽车的“大脑”,从硬件到软件主要包括:
-> 1、异构硬件平台:CPU 计算单元、 AI 单元( GPU、 ASIC、 FPGA)、MCU控制单元、存储、ISP 等其他硬件组成的自动驾驶域控制器;
-> 2、 系统软件:硬件抽象层( Hypervisor、 BSP)、操作系统内核( QNX/Linux/Andriod/Vxworks)、中间件组件等;
-> 3、 功能软件:自动驾驶通用框架(感知、决策、执行)、功能软件通用框架(数据抽象/数据流框架/基础服务);
-> 4、 其他:工具链(开发、仿真、调试、测试等)、以及安全体系(功能安全、信息安全等)。
未来趋势:
软硬件深度融合:未来,汽车智能化的发展将更加注重软硬件的深度融合。SoC主控芯片将不仅仅是一个计算平台,还将与汽车软件紧密集成,共同实现更高级别的自动驾驶和智能化功能。
生态系统建设:汽车厂商和芯片、软件供应商将共同构建完善的生态系统,通过开放合作和资源共享,推动汽车智能化技术的快速发展和普及。
二、智能驾驶的硬件核心—芯片
计算芯片在算力时代下确实成为了智能网联汽车的核心。随着汽车EE(电气/电子)架构的不断革新,汽车半导体行业得到了高速发展。在这个领域中,汽车芯片扮演着至关重要的角色,特别是计算芯片,它们按功能可分为汽车芯片和功率半导体,其中计算芯片进一步细分为MCU(微控制器单元)芯片和SoC(系统级芯片)芯片。

汽车EE架构的革新推动了汽车半导体行业的快速发展。新的EE架构对计算芯片提出了更高的要求,推动了汽车芯片从单一功能的MCU芯片向具备更强大算力和更高集成度的SoC芯片的过渡。这种过渡不仅提升了汽车的计算能力,还促进了智能网联汽车各项功能的实现和优化。
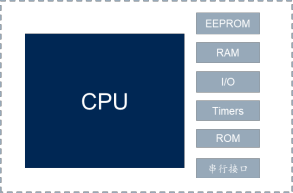
MCU( Micro Control Unit) 微控制器,是将计算机的 CPU、 RAM、 ROM、定时计数器和多种 I/O 接口集成在一片芯片上,形成芯片级的芯片;
特点:
-> 低成本与高效能:MCU通过将CPU、RAM、ROM、定时计数器和多种I/O接口等关键组件高度集成在单个芯片上,实现了成本的显著降低。这种集成不仅减少了外部元件的数量,还简化了系统的设计和制造过程,从而提高了整体性价比。
-> 灵活性:MCU的灵活性主要体现在其可编程性上。通过编写和烧录不同的程序,MCU可以适应各种控制需求,实现多样化的功能。这种灵活性使得MCU在嵌入式系统中得到了广泛应用,无论是家电、工业控制还是汽车电子等领域,都能见到MCU的身影。
-> 低功耗:MCU专为低功耗设计,能够在保证性能的同时降低能耗。这对于需要长时间运行且能源有限的设备尤为重要,如汽车电子控制系统、便携式设备等。通过采用先进的低功耗技术和优化电路设计,MCU能够在待机状态下保持极低的功耗水平,从而延长设备的使用寿命和减少能源浪费。
应用:在汽车领域,MCU常用于简单的控制任务,如车窗升降、车灯控制、雨刷控制等。

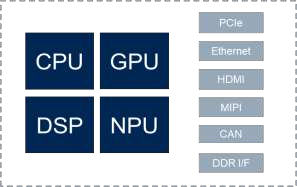
而 SoC( System on Chip) 指的是片上系统, 与 MCU 不同的是, SoC 是系统级的芯片,它既像 MCU 那样有内置 RAM、 ROM, 同时又可以运行操作系统。集成了包括CPU、GPU、DSP(数字信号处理器)、内存(RAM、ROM)、各种接口控制器(如USB、以太网、蓝牙等)、音频/视频处理模块、加密模块等在内的多个功能模块,形成了一个完整的系统。SoC能够处理更为复杂的任务,包括运行操作系统、支持多任务处理、处理多媒体数据等。
特点:
-> 高度集成:将多个功能模块集成到单个芯片上,大大减少了系统复杂性和成本。SoC将多个功能模块集成在一个芯片上,实现了高度的集成化。
-> 高性能:由于集成了高性能的处理器和专用加速单元,SoC能够处理更复杂的数据和更高级的任务。SoC能够处理复杂的任务和多任务处理,支持高速数据处理和多媒体应用。
-> 灵活性:虽然高度集成,但SoC的设计往往允许一定程度的可配置性,以适应不同的应用需求。SoC可以运行操作系统,为开发者提供了更丰富的开发环境和资源。
应用:在汽车领域,SoC通常用于需要高性能计算的任务,如自动驾驶、车载娱乐系统、高级驾驶辅助系统(ADAS)等
汇总;
MCU:更适合执行低复杂度、实时性要求高的控制任务,如车身控制、发动机管理等。
SoC:更适合处理需要大量数据处理和高级算法支持的任务,如自动驾驶的感知、决策、规划等。
智能化趋势驱动汽车芯片从 MCU 向 SoC 过渡。自动驾驶对汽车底层硬件提出了更高的要求,实现单一功能的单一芯片只能提供简单的逻辑计算,无法提供强大的算力支持,新的 EE 架构推动汽车芯片从单一芯片级芯片 MCU 向系统级芯片 SoC 过渡。
传统 MCU:
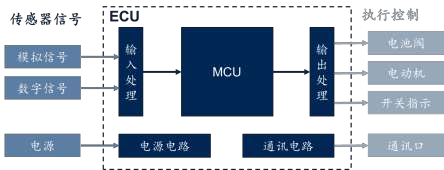
MCU 需求稳步增长,海外寡头长期垄断,MCU 是 ECU 的运算大脑。ECU( Electronic Control Unit,电子控制单元)是汽车 EE架构的基本单位,每个 ECU 负责不同的功能。MCU 芯片嵌入在 ECU 中作为运算大脑。当传感器输入信号,输入处理器对信号进行模数转换、放大等处理后,传递给 MCU 进行运算处理,然后输出处理器对信号进行功率放大、数模转换等,使其驱动如电池阀、电动机、开关等被控元件工作。
MCU(Microcontroller Unit,微控制器)根据不同场景需求,确实有8位、16位和32位之分,它们各自具有不同的特点和应用领域。
8位MCU主要应用于车体各子系统中较低端的控制功能,包括但不限于车窗、座椅、空调、风扇、雨刷和车门控制等。这些功能相对简单,对数据处理能力和内存要求较低,因此8位MCU足以满足需求。
16位MCU主要应用于动力传动系统,如引擎控制、齿轮与离合器控制和电子式涡轮系统等。此外,它们也适合用于底盘机构上,如悬吊系统、电子动力方向盘、电子刹车等。这些应用场景对数据处理能力和实时性要求较高。
32位MCU的应用领域非常广泛,包括仪表板控制、车身控制以及部分新兴的智能性和实时性的安全功能。它们还广泛应用于高端消费电子产品、汽车电子、工业自动化和医疗设备等复杂场景。
特点:

在目前市场的主流MCU当中,8位和32位MCU是最大的两个阵营。它们各自具有不同的特点和应用领域,开发者应根据具体应用场景的需求来选择合适的MCU。随着物联网、汽车电子等应用的迅猛发展,下游市场对32位MCU的需求持续提升,推动了该领域的技术进步和市场扩展。
汽车智能化不断渗透,单车 MCU 需求增加。随着汽车 EE 架构的演变,单车MCU 需求量不断增加。自动驾驶浪潮带动 MCU 需求,根据 IHS 统计,与传统燃油车单车相比,智能驾驶汽车所需 MCU 数量是其 4 倍以上,且高位数 MCU由于其高算力将扮演重要角色。
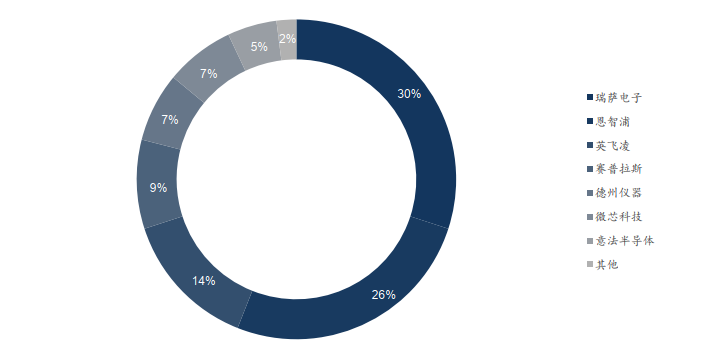
瑞萨、恩智浦、英飞凌等海外厂商占据主要市场份额,国产厂商渗透率较低。国内芯片供应商需要更加努力。
智能座舱 SoC:高通在中高端数字座舱呈现垄断局面
一芯多屏不断普及,高通在中高端数字座舱呈现垄断地位。随着汽车智能化水平的提升,智能座舱的渗透率不断增加。据相关数据显示,预计到2025年,全球和中国汽车座舱智能配置渗透率将分别达到59%和78%。这一趋势推动了智能座舱SoC芯片市场的快速增长。
一芯多屏成为主流:随着车内屏幕尺寸的增大和数量的增加,一芯多屏逐渐成为智能座舱的主流配置。这种配置要求SoC芯片具备更高的算力和性能,以支持多个屏幕的同时运行和高效协同。
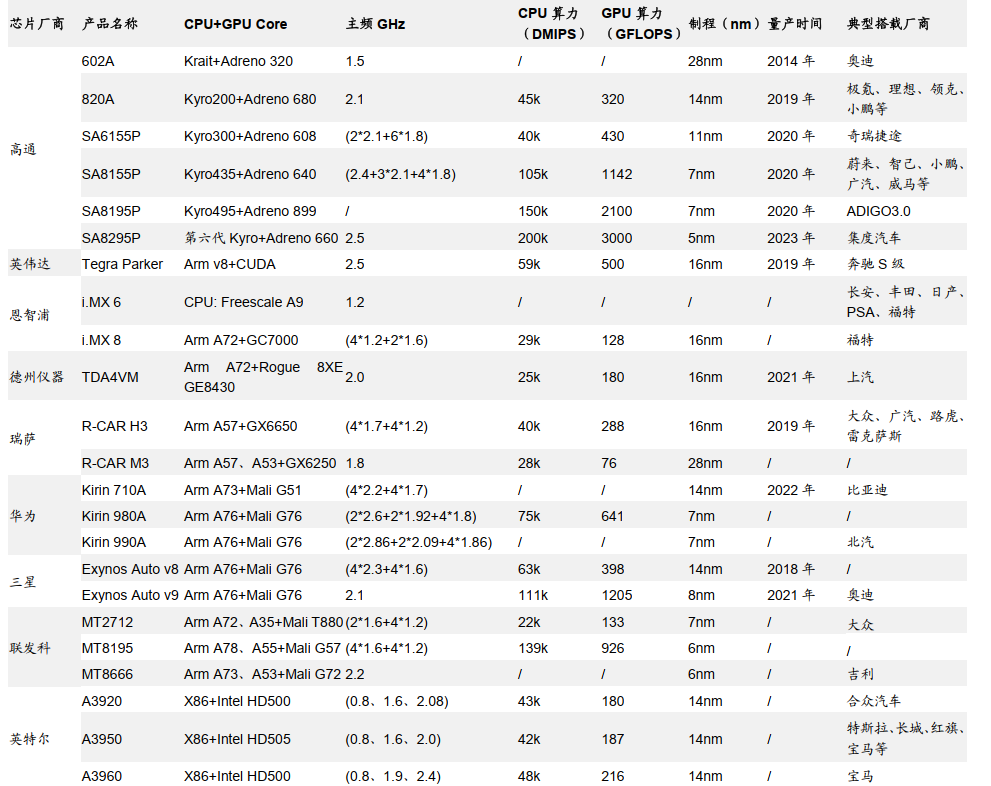
高通、恩智浦、德州仪器、英特尔、联发科等各家不断更新其座舱 SoC 产品,在中高端数字座舱域,目前高通呈现垄断地位。目前,高通已经赢得全球领先的 20+家汽车制造商的信息影音和数字座舱项目,高通骁龙 820A 和 8155 两代平台成为众多车型数字座舱平台的主流选择,高通也将推出的第四代座舱 SoC SA8295,在算力、I/O 能力等方面表现出色,不断稳固其在中高端数字座舱的稳固地位。
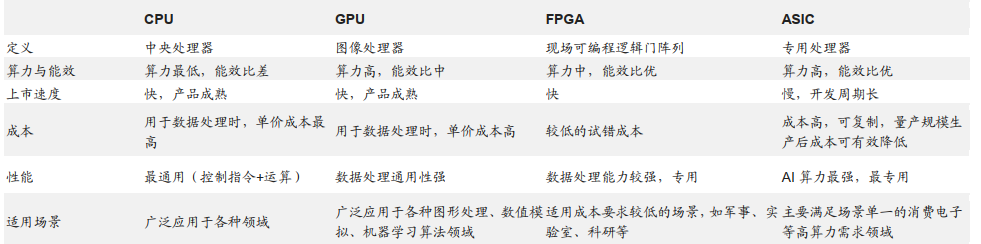
自动驾驶 SoC:CPU+XPU 是当前主流,英伟达当前领先自动驾驶芯片是指可实现高级别自动驾驶的 SoC 芯片。随着自动驾驶汽车智能化水平越来越高,需要处理的数据体量越来越大,高精地图、传感器、激光雷达等软硬件设备对计算提出更高要求,因此在 CPU 作为通用处理器之外,增加具备 AI 能力的加速芯片成为主流, 常见的 AI 加速芯片包括 GPU、 ASIC、 FPGA三类。
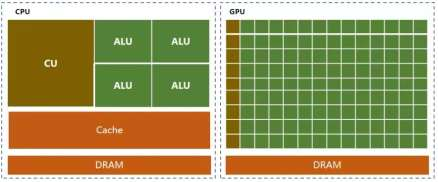
CPU作为通用处理器,其核心优势在于能够处理复杂的逻辑、条件分支以及任务间的同步协调。它拥有复杂的控制逻辑和大量的优化电路,这些设计使得CPU能够灵活应对各种计算需求,包括串行运算和通用类型的数据运算。然而,这种灵活性也带来了成本上的考量,因为CPU需要更多的空间来支持分支预测、状态保存等功能,以降低任务切换时的延时。因此,在需要大量并行计算且对灵活性要求不高的场景中,CPU可能不是最高效的选择。
与CPU不同,GPU的设计初衷是为了加速图形渲染任务。为了实现这一目标,GPU采用了数量众多的计算单元(CUDA核心或流处理器)和超长的流水线,这些设计使得GPU在并行处理大量简单计算任务时具有极高的效率。然而,GPU的控制逻辑相对简单,并且省去了大量的缓存(Cache),这是因为GPU的工作模式通常是大规模并行处理同一类型的任务,不需要像CPU那样频繁地进行任务切换和状态保存。因此,在深度学习、图像处理等需要大量并行计算的应用中,GPU往往能够提供更高的计算性能。
常见的 AI 加速芯片包括 GPU、 ASIC、 FPGA 三类:
1、GPU:适用于处理数量庞大的相对简单的运算。GPU 拥有一个由数以千计的更小、更高效的 ALU 核心组成的大规模并行计算架构,大部分晶体管主要用于构建控制电路和 Cache,而控制电路也相对简单, GPU的计算速度有拥有更强大的处理浮点运算的能力,更擅长处理多重任务,比如图形计算。GPU因其强大的并行计算能力而被广泛应用于AI领域。特别是在训练深度学习模型时,GPU能够显著加速计算过程。然而,GPU的灵活性也意味着它在某些特定应用中可能不是最优选择。
2、FPGA:FPGA介于GPU和ASIC之间,它可以在硬件层面上进行编程和配置,以适应不同的计算需求。FPGA的灵活性使得它能够在AI领域发挥重要作用,特别是在需要快速原型开发和算法验证的场景中。然而,FPGA的编程复杂度和成本也相对较高。
3、ASIC:ASIC是为特定应用而定制的芯片。在AI领域,ASIC可以根据深度学习算法的特点进行高度优化,从而在特定任务上实现极高的计算效率和能效比。然而,ASIC的缺点是灵活性差,一旦设计完成就很难进行更改或升级。
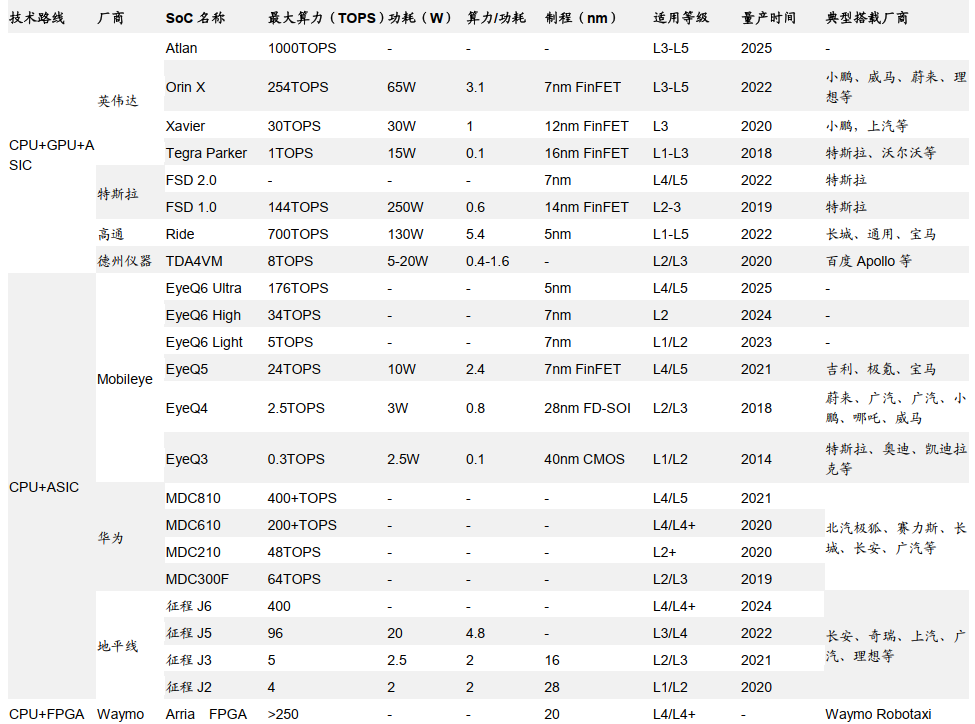
“CPU+XPU”是当前自动驾驶 SoC 芯片设计的主流趋势。根据 XPU 选择不同,又可以分为三种技术路线:
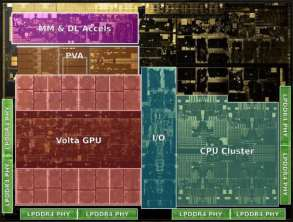
-> CPU+GPU+ASIC:
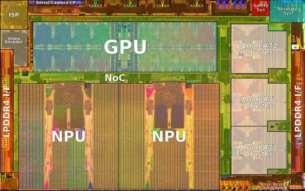
“CPU+GPU+ASIC”,主要代表英伟达、特斯拉 FSD 以及高通 Ride。英伟达 Xavier 和特斯拉 FSD 采用“CPU+GPU+ASIC”的设计路线,英伟达Xavier 以 GPU 为计算核心,主要有 4 个模块:CPU、 GPU、以及两个 ASIC芯片 Deep Learning Accelerator( DLA)和 Programmable Vision Accelerator( PVA);特斯拉 FSD 芯片以 NPU( ASIC)为计算核心,有三个主要模块:CPU、 GPU 和 Neural Processing Unit( NPU)。
-> CPU+ASIC:
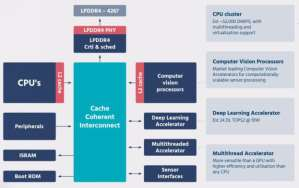
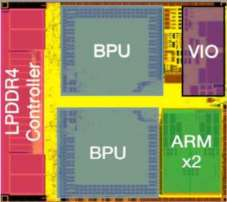
“CPU+ASIC”,主要代表 Mobileye EyeQ5 系列和地平线征程系列。Mobieye EyeQ5 和地平线征程系列采用“CPU+ASIC”架构, EyeQ5 主要有 4个模块:CPU、 Computer Vision Processors( CVP)、 Deep Learning Accelerator( DLA)和 Multithreaded Accelerator( MA),其中 CVP 是针对传统计算机视觉算法设计的 ASIC;地平线自主设计研发了 Al 专用的 ASIC 芯片 Brain Processing Unit( BPU)。
-> CPU+FPGA。
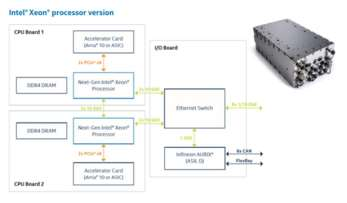
要代表 Waymo。与其余厂商不同, Waymo 采用“CPU+FPGA”的架构,其计算平台采用英特尔 Xeon12 核以上 CPU,搭配Altera 的 Arria 系列 FPGA。
目前各家发布的最新芯片平台均可以支持 L3 或 L4 级的算力需求,英伟达当前处于领先位置。从相关量产车型来看,英伟达 Orin 成为当下的主流选择, Mobileye 正在逐渐掉队。
评估芯片性能,算力、能耗、效率缺一不可
评估芯片的性能,一般采用 PPA 即 Power(功耗), Performance(性能),Aera(面积)三大指标来衡量性能。而智能驾驶领域,峰值算力成为衡量自动驾驶芯片的最主要指标,常见的指标有 TOPS、 FLOPS、 DMIPS 三种:
-> TOPS( Tera Operation Per Second):每秒完成操作的数量,乘操作算一个 OP,加操作算一个 OP。TOPS 的物理计算单位是积累加运算( Multiply Accumulate, MAC), 1 个 MAC 等于 2 个 OP。TOPS 表示每秒进行 1 万亿次操作。
-> FLOPS( Floating-Point Operations Per Second):每秒可执行的浮点运算次数的字母缩写,它用于衡量计算机浮点运算处理能力。浮点运算,包括了所有涉及小数的运算。MFLOPS( MegaFLOPS)等于每秒 1 百万次的浮点运算;GFLOPS( GigaFLOPS)等于每秒 10 亿( =10^9)次的浮点运算;TFLOPS( teraFLOPS)等于每秒 1 万亿次的浮点运算。
-> DMIPS( Dhrystone Million Instructions Per Second):是测量处理器运算能力的最常见基准程序之一,常用于处理器的整型运算性能的测量。MIPS:每秒执行百万条指令,用来计算同一秒内系统的处理能力,即每秒执行了多少百万条指令。不同的 CPU 指令集不同、硬件加速器不同、 CPU架构不同, 导致不能简单的用核心数和 CPU 主频来评估性能, Dhrystone作为统一的跑分算法, DMIPS 比 MIPS 的数值更具有意义。
智能座舱 SoC:
DMIPS 衡量 CPU 算力的主要单位是 DMIPS,基本上 SoC 高于 20,000 DMIPS才能流畅地运行智能座舱的主要功能,如 AR 导航或云导航、 360 全景、播放流媒体、 AR- HUD、多操作系统虚拟机等。GPU 方面, 100 GFLOPS 的算力就可以支持 3 个 720P 的屏幕。一般来说, CPU 高于 20,000 DMIPS, GPU 高于 100 GFLOPS 的 SoC 就是智能座舱 SoC 芯片。
自动驾驶 SoC:
TOPS 峰值算力体现的只是芯片的理论上限,不能代表其全部性能。自动驾驶需要的计算机视觉算法是基于卷积神经网络实现的,而卷积神经网络的本质是累积累加算法( Multiply Accumulate, MAC),实现此运算操作的硬件电路单元,被称为“乘数累加器”。这种运算的操作,是将乘法的乘积结果 bc 和累加器 a 的值相加,再存入累加器 a 的操作。TOPS = MAC 矩阵行 MAC 矩阵列* 2 *主频, TOPS 峰值算力反映的都是 GPU 理论上的乘积累加矩阵运算算力,而非在实际 AI 应用场景中的处理能力,具有很大的局限性。以英伟达的芯片为例, Orin、 Xavier 的利用率基本上是 30%左右,而采用 ASIC 路线, ASIC 芯片针对不同的神经网络模型去优化,基本上可以做到 60%~80%之间。
三、总结
智能驾驶系统依赖于高性能的计算芯片来处理复杂的传感器数据、运行深度学习算法、进行传感器融合和轨迹预测等功能。计算芯片的算力直接影响智能驾驶系统的性能和效率,是实现高级自动驾驶功能的关键。
近年来,国产车企在智驾芯片领域取得了显著进展。例如,蔚来汽车宣布了首个车规级5nm智能驾驶芯片“神玑NX9031”成功流片,该芯片拥有超过500亿颗晶体管,算力达到了1000 Tops左右。同样地,小鹏汽车也自主设计了智驾芯片图灵芯片,该芯片可用于L4级自动驾驶,并具备高性能的计算能力。
芯片对智能驾驶系统的影响
算力提升:高性能计算芯片能够处理更多的传感器数据和复杂的计算任务,从而提升智能驾驶系统的性能和效率。
实时性:智能驾驶系统需要在短时间内完成复杂的运算和决策,高性能芯片能够确保系统的实时性。
安全性:计算芯片的性能还直接影响智能驾驶系统的安全性,通过提升算力可以降低系统因处理延迟而导致的安全风险。
随着自动驾驶技术的不断发展,对计算芯片的需求将越来越高。未来,智能驾驶芯片将朝着更高性能、更低功耗、更易于集成的方向发展。同时,国产车企在自研芯片方面也将持续发力,推动智能驾驶技术的自主可控和创新发展。

推荐阅读:

















 587
587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









