









1、基于谐波扰动注入法的阻抗扫频测量基本思路
基于谐波扰动注入法的阻抗扫频测量基本原理和思路[1]:在被测对象运行系统的稳态工作轨迹上叠加一系列不同频率的小信号正弦扰动电压,注入非线性系统,小扰动电压会在端口激发出电流响应,对电流响应进行傅里叶分析和对称分量分析处理(若风电机组/光伏/新能源等并网系统采用的变压器为星角接线,不存在零序通路,因而零序分量已被滤除,只需要分析正序和负序分量),被测对象端口得到的一系列频率电压扰动与电流响应之间的比值/传递函数定义为系统在各频率下的阻抗特性。与阻抗解析模型的理论计算结果对比,可验证阻抗特性在各频段/宽频段内的正确性。阻抗扫频结果也可用于分析小干扰/动态/谐波稳定性。
基于谐波扰动注入的阻抗扫频测量方法原理如下[1]:
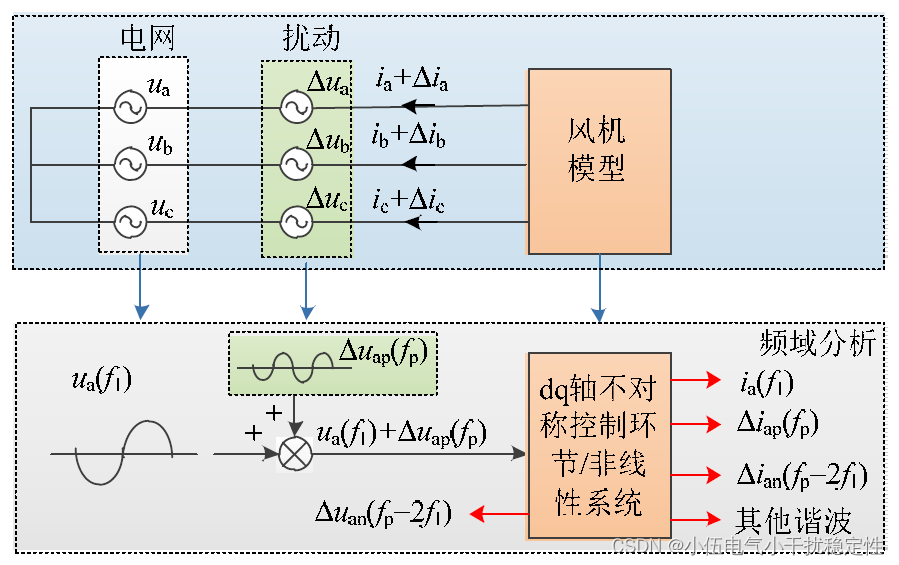
图1 基于谐波扰动注入的阻抗扫频测量方法原理[1]
2、频率耦合现象本质机理
如果往被测系统注入任意频率的谐波干扰时,若只有相同频率的电流/电压响应,则该被测系统可称为镜像频率解耦系统[2]。原始序阻抗域中该子系统是线性时不变系统,则此时电流控电压源置零,即耦合阻抗项值为零。
系统进行线性化后不仅包含稳态分量,还包含注入扰动后的状态变量小干扰量,注入扰动电压后会产生相同扰动频率处的电流响应,该电流响应与各稳态下的状态变量存在相乘关系,会产生各种新频率的耦合谐波(时域三角函数积化和差、频域卷积定理)。控制环不断作用于此类电流耦合谐波,导致调制波中也存在耦合谐波,造成不同频率成分之间的耦合作用,最终使得注入扰动后不仅会产生一系列扰动频率处的响应,还会产生耦合频次处的耦合谐波。注意,谐波次数h可根据对模型精度和复杂度的要求进行选择。
以跟网型风电机组的镜像频率耦合现象为例进行说明。变流器控制系统中的锁相环 (phase-locked loop,PLL)、不对称电流控制器和直流母线电压控制器,是导致注入电压扰动后会产生多频率耦合电流扰动响应的主要原因,其中扰动频率处的正序电流响应(同频率的扰动电流分量)与二倍频耦合频率处的负序电流响应或正序电流响应(耦合电流分量)关于基频50Hz处对称,其他频率下的电流响应幅值太小忽略不计。频率耦合效应是振荡时次/超同步谐波分量同时存在、中高频振荡时耦合频率分量存在的主要原因。
3、基于谐波扰动注入法的阻抗扫频测量实现思路和细节
基于谐波扰动注入法的阻抗扫频测量实现步骤详见本人小干扰稳定性专栏第一篇文章
第一篇(全文链接:
基于谐波扰动注入法的阻抗扫频测量实现细节如下:
① 扫频注入时刻、频率及幅值选择:扰动注入时刻一般选择系统达到稳态后,扰动提取时刻一般也选择注入扰动短暂间隔后,避免暂态过程的影响。扰动频率视研究需要而选择,一般来说扫频观察1Hz~1000Hz频段内端口阻抗特性即可,如果研究高频稳定性,可将扫频频段定为500Hz~3000Hz。扰动信号幅值视具体系统而定,必须足够小以满足小信号假设;必须足够大以处理变流器的噪声和高频开关谐波,以免被噪音信号和高频谐波分量影响,造成系统稳态工作点偏移。一般来说,扰动信号幅值选择在稳态值的5%~10%之间,即0.05p.u.到0.010p.u。注入扰动信号幅值和输出电流响应幅值要满足线性关系(扰动信号幅值增大几倍,则输出电流响应幅值也要增大对应的倍数,而两者扫频结果前后相位相等,即满足齐次性和可加性)。
② 小干扰信号源选取:一般有两种类型的扰动注入方法:并联电流源注入法和串联电压源注入法。为了最大化注入被测系统侧的扰动,必须根据电网阻抗选择适当的扰动注入方法。当电网阻抗远大于换流器阻抗时,大部分分流电流扰动将流入换流器侧(并联分流定理,电流流入小电阻一侧),因此这种注入方法在这种情况下扫频精度可接受。否则,应采用串联电压注入法。
1、扰动电压注入相比于扰动电流注入,其所有扰动成分均注入被测系统,不存在扰动电流注入时的分流现象,扫频精度较高。
2、当待测装备阻抗远大于电网阻抗时,一般采用扰动电压注入法进行阻抗扫频。
3、扰动测量装置串联在系统中时,需要耐受系统电流。
③ 系统存在频率耦合效应时:阻抗扫频则需要计算两次,并联电流源注入和串联电压源注入下测得的阻抗不一致;系统不存在频率耦合效应时,对于单一阻抗只需要扫频计算一次,并联电流源注入和串联电压源注入下测得的阻抗一致[2]。
④ 系统仿真步长、接口延时与扫频精度的关系:在小于100Hz的中低频段时,阻抗特征主要受到带宽小的控制环节以及系统本体多谐波耦合特性的影响;随着频率大于100Hz,逐渐达到各控制器的截止频率,因此在中高频段风电机组阻抗特性主要由带宽大的控制环节、电感电容无源元件、延时特性等决定。因此,系统仿真步长越长,接口延时越长,扫描速度快,但与理想状态阻抗特性的幅值误差越大,扫频精度越低。这两个因素对阻抗特性的影响在中高频段比较明显,低频段可忽略[1]。
⑤ 考虑到系统振荡通常发生在互联系统的谐振点附近,谐振频率点处扫频结果往往存在误差,尤其是相位响应中的误差,可通过相邻频率点出的扫频结果进行拟合补偿,以得到准确的小干扰稳定分析结果。值得说明的是,谐振点频率由系统的拓扑结果、控制结构和控制特性决定,对于不同的参数和阻抗模型,谐振点频率有区别。
4、小干扰稳定性分析专栏文章导学(初学者必看)
小干扰稳定性分析的基础是小干扰稳定性模型,小干扰稳定性模型的精确度决定了小干扰稳定性判定结果的准确性。小干扰稳定性分析系列文章中的第一篇、第二篇、第三篇已详细讲解了跟网型变流器VSC序阻抗建模原理、谐波线性化理论推导以及新能源发电并网系统小干扰稳定性分析、控制交互作用分析、主导参数/变流器分析、宽频振荡复现等内容,在入门阻抗建模前建议一并学习,夯实基础,提高学习效果。
第一篇(全文链接:
第四篇:基于谐波状态空间理论(HSS)的柔直MMC-HSS动态建模可获取系统稳态工作点,实现MMC系统定常化,是MMC-HSS小干扰阻抗建模的基础,学习本文内容前建议一并学习本系列文章第四篇(包括MMC拓扑结构、工作特性、控制原理、桥臂平均值模型的详细讲解阐述),以便更加系统、深入、全面地学习MMC阻抗建模。
第四篇(全文链接:
第五篇:MMC-HSS开环阻抗建模是MMC-HSS闭环阻抗建模的建模基础,其涉及到的基本方法和相关理论一致,实现了对非线性时变系统的定常化和线性化处理,既可以指导MMC主电路参数及谐波阶数的合理设计,又可以验证HSS理论及谐波线性化方法应用于MMC精细化阻抗建模时的有效性。学习闭环阻抗建模前建议一并学习,以便更加系统、深入、全面地学习MMC-HSS阻抗建模。
第五篇(全文链接:
第六篇:小干扰稳定性分析系列文章中的第六篇重点讲解了新能源发电系统(无源系统)与柔直MMC之间构成的并网系统中柔直MMC在构网型控制策略(交流电压V-F控制)下的HSS小干扰阻抗建模原理、扫频验证,提供构网型控制策略(交流电压V-F控制)下MMC闭环阻抗建模案例,实现中英文顶刊文献复现。
第六篇(全文链接:
5、参考文献
[1] 李光辉,王伟胜,刘纯,等.基于控制硬件在环的风电机组阻抗测量及影响因素分析[J].电网技术,2019,43(05):1624-1631.
[2] Yang, Dongsheng , et al. Automation of Impedance Measurement for Harmonic Stability Assessment of MMC-HVDC Systems[C]. 18th International Workshop on Large-scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants 2019.
[3] Atle Rygg, Marta Molinas,Chen Zhang,et al. A Modified Sequence-Domain Impedance Definition and Its Equivalence to the dq-Domain Impedance Definition for the Stability Analysis of AC Power Electronic Systems[J] .IEEE Journal Of Emerging And Selected Topics In Power Electronics,2016,4(4):1383-1396.

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









