







float64 height
#### (二)编辑配置文件
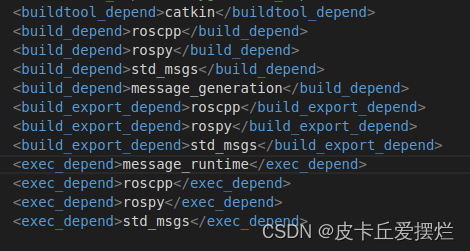
1. package.xml中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
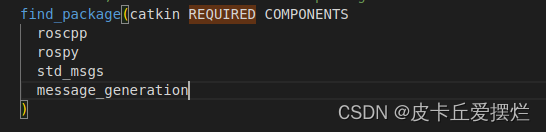
2. CMakeLists.txt编辑 msg 相关配置
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
需要加入 message_generation,必须有 std_msgs
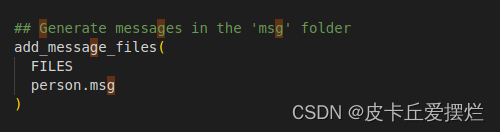
配置 msg 源文件
add_message_files(
FILES
Person.msg
)
生成消息时依赖于 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)

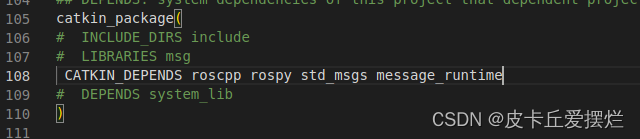
#执行时依赖
catkin_package(
INCLUDE_DIRS include
LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
DEPENDS system_lib
)
#### (三)编译
`ctrl + shift + B`
**编译后的中间文件查看:**
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 825
825

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









