






一、路径规划的基本概念
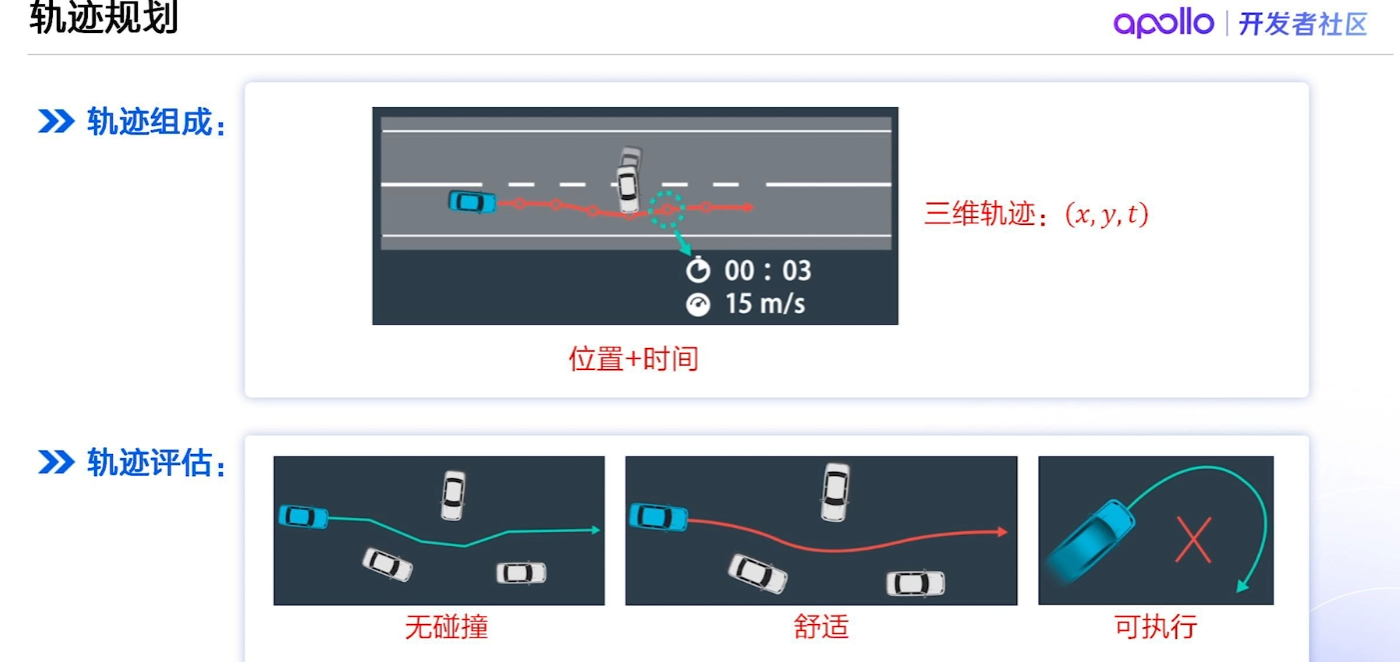
路径规划是指根据给定的起点和终点,在给定的环境中找到一条最优或者满足特定约束条件的路径。在自动驾驶中,路径规划是指通过算法确定车辆在道路上的最佳行驶路径,以实现安全、高效的驾驶。
1.1路径规划的定义和作用
路径规划是指在给定起点和终点的情况下,确定一条从起点到终点的最佳路径的过程。它是计算机科学、人工智能和自动化领域中的一个重要问题,广泛应用于自动驾驶、物流配送、无人机导航等领域。
路径规划的作用主要有以下几个方面:
- 寻找最短路径:路径规划可以帮助找到起点到终点之间最短的路径,从而节省时间和资源。在交通领域中,最短路径可以帮助驾驶员选择最优的行驶路线,减少行驶距离和时间。
- 避开障碍物:路径规划可以考虑到路上的障碍物或者限制条件,帮助规避障碍物并找到可行的路径。在自动驾驶领域中,路径规划可以帮助车辆避免碰撞障碍物,保证行驶安全。
- 优化驾驶策略:路径规划可以结合实际交通状况和驾驶需求,选择合适的驾驶策略。例如,在高速公路上行驶时,路径规划可以考虑到车流量和限速等因素,选择合适的行驶速度和车道。
- 考虑多种因素:路径规划可以综合考虑多种因素,如路况、交通信号灯、限制条件等,选择合适的路径。例如,在城市道路上行驶时,路径规划可以考虑到拥堵情况和交通信号灯的状态,选择最优的行驶路线。
1.2 路径规划的挑战和技术要求
路径规划的挑战和技术要求 路径规划面临着一些挑战和技术要求。
- 首先,道路环境复杂多变,包括不同类型的道路、交通标志、交通信号等,路径规划算法需要能够适应不同的交通场景。
- 其次,路径规划需要考虑到车辆的动力学约束,如最大加速度、最大转向角等,以确保驾驶的安全性和稳定性。另外,路径规划还需要考虑到实时感知和决策,能够及时应对交通变化和紧急情况。
二、Apollo自动驾驶规划技术的核心原理
2.1 Apollo自动驾驶规划技术
Apollo自动驾驶规划技术是基于百度Apollo平台开发的一套规划算法和系统。它的整体架构包括感知模块、定位模块、规划模块和控制模块等。在规划模块中,主要实现了路径规划算法和行为决策算法。
2.2 路径规划算法的基本原理
路径规划算法是Apollo自动驾驶规划技术的核心之一。它的基本原理是根据车辆当前位置和目标位置,结合道路环境和约束条件,通过算法计算出最佳路径。常用的路径规划算法包括A*算法、Dijkstra算法和RRT算法等。
2.3 行为决策算法的基本原理和方法
行为决策算法是Apollo自动驾驶规划技术的另一个重要组成部分。它的基本原理是根据感知模块提供的道路环境信息,通过算法判断当前驾驶状态和交通场景,并做出相应的决策。常用的行为决策算法包括状态机、强化学习和深度学习等。
# 导入必要的库
import numpy as np
# 定义路径规划函数
def path\_planning(start, goal, obstacles):
# 使用A\*算法计算最佳路径
# ...
# 返回最佳路径
return path
# 定义行为决策函数
def behavior\_decision(path, obstacles):
# 根据路径和障碍物信息,判断行驶策略
# ...
# 返回行驶决策
return decision
# 定义多模态规划函数
def multimodal\_planning(start, goal, obstacles):
# 调用路径规划函数,得到最佳路径
path = path\_planning(start, goal, obstacles)
# 调用行为决策函数,得到行驶决策
decision = behavior\_decision(path, obstacles)
# 返回最佳路径和行驶决策
return path, decision
# 示例使用
start = (0, 0) # 起点坐标
goal = (10, 10) # 终点坐标
obstacles = [(2, 2), (3, 4), (5, 7)] # 障碍物坐标列表
# 调用多模态规划函数
path, decision = multimodal\_planning(start, goal, obstacles)
# 打印结果
print("最佳路径:", path)
print("行驶决策:", decision)
三、多模态规划的优势
3.1 多模态规划的概念和意义
多模态规划是指在路径规划中综合考虑不同的驾驶模式和策略,以适应不同的交通场景和驾驶需求。传统的路径规划算法通常只考虑一种驾驶模式,无法适应复杂的道路环境。而多模态规划能够根据不同的驾驶场景,选择合适的驾驶模式和策略,提供更灵活、更智能的驾驶体验。
给大家的福利
零基础入门
对于从来没有接触过网络安全的同学,我们帮你准备了详细的学习成长路线图。可以说是最科学最系统的学习路线,大家跟着这个大的方向学习准没问题。
同时每个成长路线对应的板块都有配套的视频提供:
因篇幅有限,仅展示部分资料
网络安全面试题
绿盟护网行动
还有大家最喜欢的黑客技术
网络安全源码合集+工具包
所有资料共282G,朋友们如果有需要全套《网络安全入门+黑客进阶学习资源包》,可以扫描下方二维码领取(如遇扫码问题,可以在评论区留言领取哦)~
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 586
586











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









