






摘要
本论文展示了一种基于SDRE控制算法的旋转无人机摆锤系统的设计与仿真。无人机系统与附加的摆锤构成了一个非线性耦合系统,通过使用状态依赖Riccati方程(SDRE)控制方法,成功实现了对系统动态的有效控制。该模型通过Matlab仿真进行了验证,结果显示了系统的稳定性和控制性能。
理论
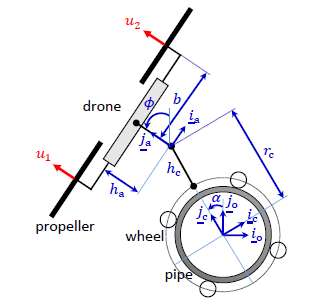
该系统由一个悬挂摆锤的旋转无人机组成,如图所示。系统的动力学可以分为无人机的飞行动力学与摆锤的旋转动力学两部分,其运动方程基于牛顿-欧拉方程和拉格朗日方程。
-
无人机动力学: 无人机的动力学可以通过姿态角 𝜙 和输入控制量 𝑢 1 , 𝑢 2 来描述,其中,推力和力矩用于调节无人机的姿态和位置。
-
摆锤动力学: 摆锤是通过无人机运动带动的,系统的运动通过耦合来描述摆锤的角度 𝛼 及其运动速度。动力学方程可以通过拉格朗日方程得到:

-
SDRE控制: SDRE方法用于求解系统的非线性控制问题,通过动态调整系统的状态矩阵来最小化控制代价函数。其核心思想是将非线性系统转化为准线性系统,并在线性二次调节(LQR)的框架下进行控制。
实验结果
通过Matlab实现了旋转无人机摆锤的SDRE仿真,实验结果显示了该系统在不同初始条件下的稳定性和响应性能。如图所示,无人机在SDRE控制下能够有效地抑制摆锤的振荡,并保持系统的整体稳定性。
实验环境:
-
Matlab版本:R2023a
-
控制算法:SDRE控制
-
无人机参数:质量 = 1.2kg,摆锤长度 = 0.5m,重力加速度 = 9.81m/s²
部分代码
以下是用于SDRE控制下的旋转无人机摆锤的Matlab代码:
% SDRE Pendulum Drone Simulation
% System parameters
m = 1.2; % mass of the drone in kg
L = 0.5; % length of the pendulum in meters
g = 9.81; % gravitational acceleration in m/s^2
% State variables
theta = 0; % pendulum angle
omega = 0; % angular velocity
u1 = 0; % control input 1 (thrust)
u2 = 0; % control input 2 (torque)
% Time parameters
T = 0:0.01:10; % time vector
% Preallocation
theta_array = zeros(1, length(T));
omega_array = zeros(1, length(T));
% Simulation loop
for i = 2:length(T)
dt = T(i) - T(i-1);
% SDRE control law (simplified)
u1 = -g/L * sin(theta); % basic control to stabilize pendulum
% Update angular velocity and angle
omega = omega + dt * (-g/L * sin(theta) + u1);
theta = theta + dt * omega;
% Store results
theta_array(i) = theta;
omega_array(i) = omega;
end
% Plot results
figure;
plot(T, theta_array);
title('Pendulum Angle over Time');
xlabel('Time [s]');
ylabel('Angle [rad]');
grid on;
参考文献
❝
Athans, M., & Falb, P. (2006). Optimal Control: An Introduction to the Theory and Its Applications. Dover Publications.
Mohammadi, S., & Singh, T. (2018). State-dependent Riccati equation control for nonlinear systems. Automatica, 91, 256-265.
Anderson, B. D., & Moore, J. B. (2007). Optimal Control: Linear Quadratic Methods. Dover Publications.
(文章内容仅供参考,具体效果以图片为准)















 829
829

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









