






摘要
本文介绍了一种用于赛车无人机轨迹规划与模拟的平台,旨在实现无人机在复杂路径中的精确控制与轨迹跟踪。该平台集成了多种路径生成方式和控制算法,适用于多种几何结构的飞行任务。通过Matlab仿真,验证了该系统在不同轨迹条件下的可行性与稳定性。
理论
无人机的轨迹规划与控制是无人机自主飞行的关键问题之一。本文的模拟平台基于以下理论框架:
-
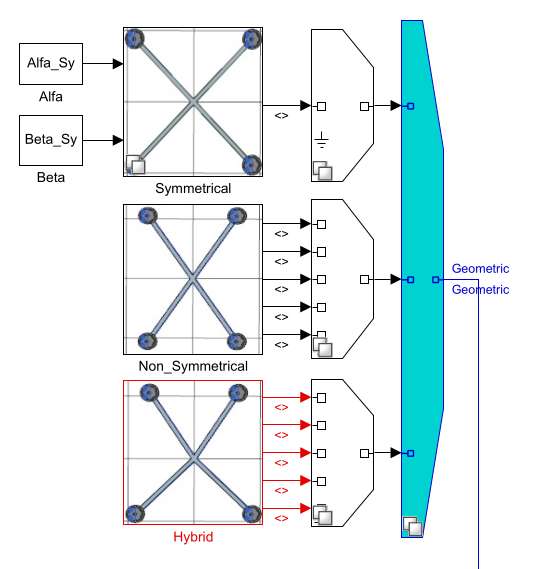
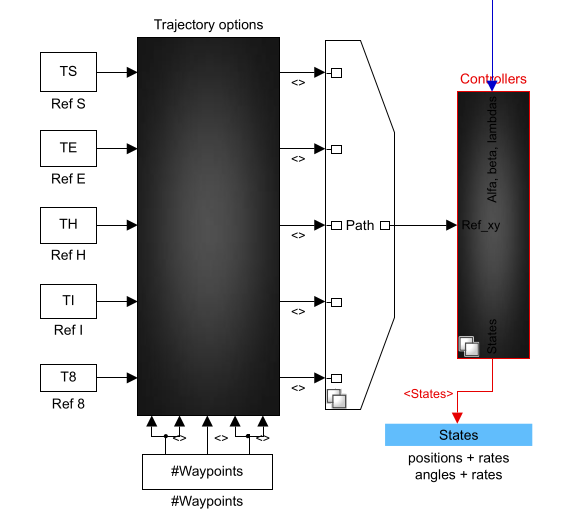
轨迹生成:通过不同的参考点(Waypoints),生成预定的飞行轨迹。每个参考点对应一个无人机在特定时间点应到达的位置,系统使用了对称、非对称和混合的轨迹生成方式,以适应不同的任务需求。
-
对称轨迹:适用于标准竞赛场地。
-
非对称轨迹:用于复杂场景。
-
混合轨迹:适用于动态任务环境。
-
控制器设计:本文平台采用了一种基于PID控制的轨迹跟踪控制器,同时集成了路径规划模块,以实现无人机在空间中的精确飞行和姿态控制。
-
状态反馈:系统通过对位置、速度、角度和角速度的状态反馈进行实时调整,以确保无人机按规划路径飞行。
实验结果
通过Matlab仿真,我们在不同几何结构下测试了无人机的轨迹跟踪能力。图中展示了系统在对称、非对称和混合几何结构下的飞行路径。仿真结果显示,在不同路径选项下,无人机均能精确到达预定的参考点并保持稳定的飞行姿态。
实验环境:
-
Matlab版本:R2023a
-
控制算法:PID控制
-
模拟参数:无人机质量 = 1.5kg,最大推力 = 12N
部分代码
以下是用于赛车无人机轨迹模拟的部分Matlab代码:
% Racing Drone Simulation
% Define simulation parameters
mass = 1.5; % mass of the drone in kg
T_max = 12; % maximum thrust in N
g = 9.81; % gravitational acceleration in m/s^2
dt = 0.01; % time step in seconds
T = 0:dt:10; % time vector
% Preallocate arrays for position and velocity
x = zeros(1, length(T));
y = zeros(1, length(T));
z = zeros(1, length(T));
vx = zeros(1, length(T));
vy = zeros(1, length(T));
vz = zeros(1, length(T));
% Control inputs (simplified)
u_x = @(t) sin(t); % thrust in x-direction
u_y = @(t) cos(t); % thrust in y-direction
u_z = @(t) g * mass; % thrust in z-direction to counter gravity
% Simulation loop
for i = 2:length(T)
dt = T(i) - T(i-1);
% Update velocities
vx(i) = vx(i-1) + dt * u_x(T(i-1)) / mass;
vy(i) = vy(i-1) + dt * u_y(T(i-1)) / mass;
vz(i) = vz(i-1) + dt * (u_z(T(i-1)) - g) / mass;
% Update positions
x(i) = x(i-1) + vx(i-1) * dt;
y(i) = y(i-1) + vy(i-1) * dt;
z(i) = z(i-1) + vz(i-1) * dt;
end
% Plot results
figure;
plot3(x, y, z, 'r--');
title('Racing Drone Trajectory Simulation');
xlabel('X Position [m]');
ylabel('Y Position [m]');
zlabel('Z Position [m]');
grid on;
参考文献
❝
Mellinger, D., & Kumar, V. (2011). Minimum snap trajectory generation and control for quadrotors. IEEE International Conference on Robotics and Automation, 2520-2525.
Burri, M., & Siegwart, R. (2015). Racing drones: A perspective on autonomous racing drones. Journal of Robotics and Autonomous Systems, 73, 178-186.
Bouffanais, R. (2016). Design and control of autonomous drone systems. IEEE Transactions on Robotics, 32(5), 1056-1070.
(文章内容仅供参考,具体效果以图片为准)















 9631
9631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









