







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
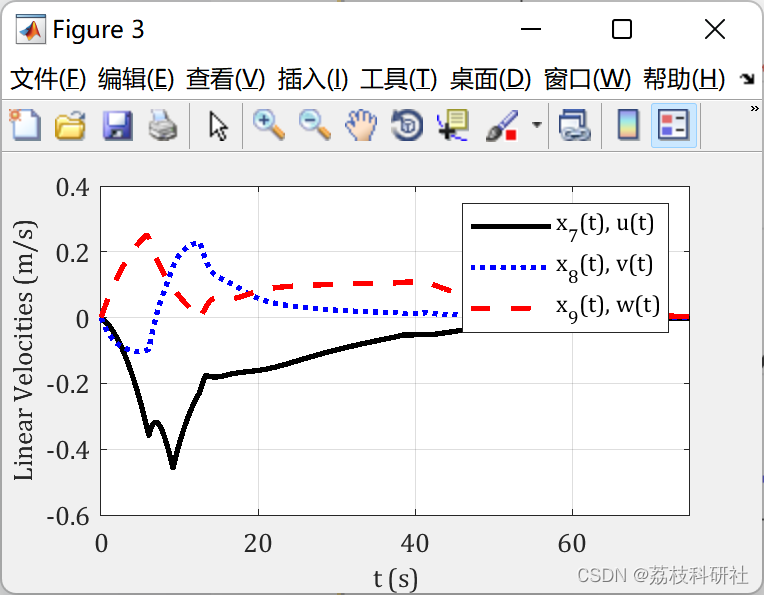
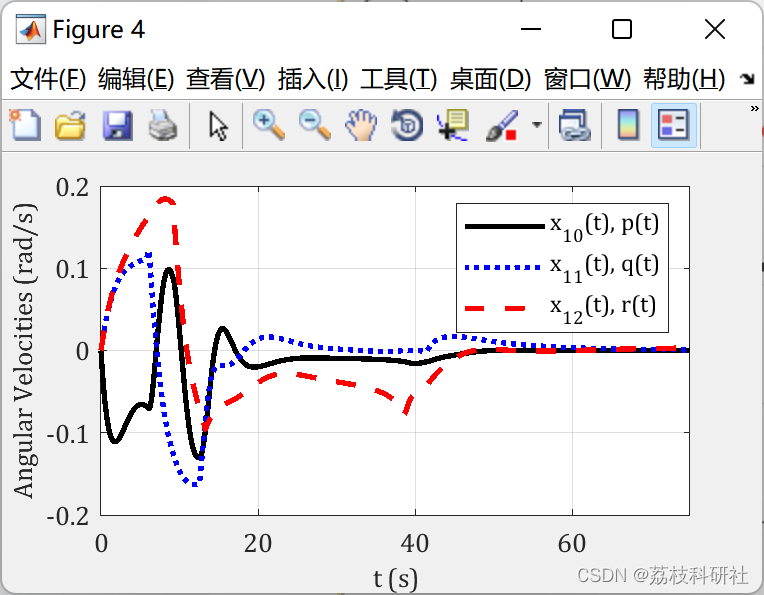
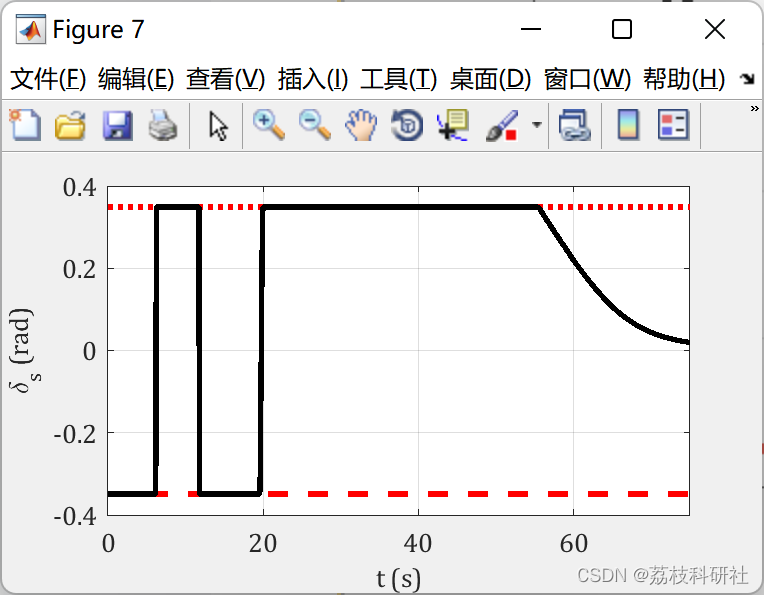
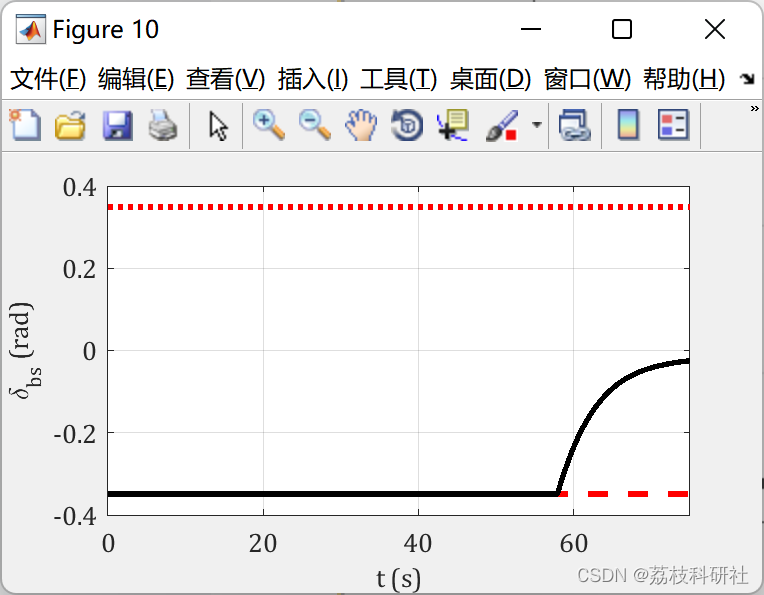
水下航行器在6自由度下的非线性动力学是高度非线性的,并且在控制中是非仿射的。NPS II是一种著名的无人机模型。这些代码在非仿射模式下对NPS II无人机进行SDRE控制,其中输入关系是非线性的。动态和控制结构可以遵循这篇文献:
Geranmehr, Behdad, and Saeed Rafee Nekoo. "Nonlinear suboptimal control of fully coupled non-affine six-DOF autonomous underwater vehicle using the state-dependent Riccati equation." Ocean Engineering 96 (2015): 248-257.
📚2 运行结果









部分代码:
UB=20*pi/180;
xin1=6; %x
xin2=4; %y
xin3=-5; %z
xin4=0.2; %phi
xin5=-0.15; %theta
xin6=0.25; %psi
xin7=0; %u
xin8=0; %v
xin9=0; %w
xin10=0; %p
xin11=0; %q
xin12=0; %r
xin13=0; %delta_r
xin14=0; %delta_s
xin15=0; %delta_b
xin16=0; %delta_bp
xin17=0; %delta_bs
xin18=100; %n
xdes1=0;
xdes2=0;
xdes3=0;
xdes4=0;
xdes5=0;
xdes6=0;
xdes7=0;
xdes8=0;
xdes9=0;
xdes10=0;
xdes11=0;
xdes12=0;
L=5.3; %The length of the AUV (m)
g=9.81; % (m/s^2)
rho=1000; %density of water (kg/m^3)
m=5454.54; %The mass of the AUV (kg)
W=53400; %weight (N)
Buoy=53400; %buoyancy (N)
Ix=2038;Iy=13587;Iz=13587; % (Nms^2)
Ixy=-13.58;Iyz=-13.58;Ixz=-13.58; % (Nms^2)
xG=0;yG=0;zG=0.061;
xB=0;yB=0;zB=0;
I_O=[Ix,-Ixy,-Ixz;...
-Ixy,Iy,Iyz;...
-Ixz,-Iyz,Iz];
r_G=[xG;yG;zG];
r_B=[xB;yB;zB];
%Non-Dimensional Hydrodynamic coefficients---------------------------------
Xpp=7.0e-3;Xqq=-1.5e-2;Xrr=4.0e-3;Xpr=7.5e-4;
Xudot=-7.6e-3;Xwq=-2.0e-1;Xvp=-3.0e-3;Xvr=2.0e-2;
Xqds=2.5e-2;Xqdb2=-1.3e-3;Xrdr=-1.0e-3;Xvv=5.3e-2;
Xww=1.7e-1;Xvdr=1.7e-3;Xwds=4.6e-2;Xwdb2=0.5e-2;
Xdsds=-1.0e-2;Xdbdb2=-4.0e-3;Xdrdr=-1.0e-2;Xqdsn=2.0e-3;
Xwdsn=3.5e-3;Xdsdsn=-1.6e-3;Xu=0;
Ypdot=1.2e-4;Yrdot=1.2e-3;Ypq=4.0e-3;Yqr=-6.5e-3;
Yvdot=-5.5e-2;Yp=3.0e-3;Yr=3.0e-2;Yvq=2.4e-2;
Ywp=2.3e-1;Ywr=-1.9e-2;Yv=-1.0e-1;Yvw=6.8e-2;
Ydr=2.7e-2;
Zqdot=-6.8e-3;Zpp=1.3e-4;Zpr=6.7e-3;Zrr=-7.4e-3;
Zwdot=-2.4e-1;Zq=-1.4e-1;Zvp=-4.8e-2;Zvr=4.5e-2;
Zw=-3.0e-1;Zvv=-6.8e-2;Zds=-7.3e-2;Zdb2=-1.3e-2;
Zqn=-2.9e-3;Zwn=-5.1e-3;Zdsn=-1.0e-2;
Kpdot=-1.0e-3;Krdot=-3.4e-5;Kpq=-6.9e-5;Kqr=1.7e-2;
Kvdot=1.2e-4;Kp=-1.1e-2;Kr=-8.4e-4;Kvq=-5.1e-3;
Kwp=-1.3e-4;Kwr=1.4e-2;Kv=3.1e-3;Kvw=-1.9e-1;
Kdb2=0;Kpn=-5.7e-4;Kprop=0;
Mqdot=-1.7e-2;Mpp=5.3e-5;Mpr=5.0e-3;Mrr=2.9e-3;
Mwdot=-6.8e-3;Muq=-6.8e-2;Mvp=1.2e-3;Mvr=1.7e-2;
Muw=1.0e-1;Mvv=-2.6e-2;Mds=-4.1e-2;Mdb2=3.5e-3;
Mqn=-1.6e-3;Mwn=-2.9e-3;Mdsn=-5.2e-3;Mq=-0.068;
Npdot=-3.4e-5;Nrdot=-3.4e-3;Npq=-2.1e-2;Nqr=2.7e-3;
Nvdot=1.2e-3;Np=-8.4e-4;Nr=-1.6e-2;Nvq=-1.0e-2;
Nwp=-1.7e-2;Nwr=7.4e-3;Nv=-7.4e-3;Nvw=-2.7e-2;
Ndr=-1.3e-2;Nprop=0;
%Dimensional Coefficients--------------------------------------------------
% Xu_au=0;
% Yv_av=2.065e-4;
% Zw_aw=3.381e-4;
% Kp_ap=0;
% Mq_aq=0.295e-3;
% Nr_ar=0.231e-3;
Xu_au=-30.9;
Yv_av=-206.5;
Zw_aw=-338.1;
Kp_ap=0;
Mq_aq=-214.66;
Nr_ar=-346.26;
%Main----------------------------------------------------------------------
[t,n]=ode45('sdre_6DOF_Fullstates',0:tf/N:tf,[xin1,xin2,xin3,xin4,xin5,xin6,...
xin7,xin8,xin9,xin10,xin11,xin12,xin13,xin14,xin15,xin16,xin17,xin18]');
save matlab
n1=n(:,1);
n2=n(:,2);
n3=n(:,3);
n4=n(:,4);
n5=n(:,5);
n6=n(:,6);
n7=n(:,7);
n8=n(:,8);
n9=n(:,9);
n10=n(:,10);
n11=n(:,11);
n12=n(:,12);
%Plots---------------------------------------------------------------------
figure(1)
axes1=axes('Parent',figure(1),'FontSize',10,'FontName','Cambria');
box(axes1,'on');
hold(axes1,'all');
plot(t,n1,'k','linewidth',2)
plot(t,n2,':b','linewidth',2)
plot(t,n3,'--r','linewidth',2)
xlabel('t (s)','FontSize',10,'FontName','Cambria');
ylabel('Position (m)','FontSize',10,'FontName','Cambria');
box on
grid on
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
Geranmehr, Behdad, and Saeed Rafee Nekoo. "Nonlinear suboptimal control of fully coupled non-affine six-DOF autonomous underwater vehicle using the state-dependent Riccati equation." Ocean Engineering 96 (2015): 248-257.
















 170
170











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











