









既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Go语言开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
本文最终效果
文章目录
一、前言
嗨,大家好,我是新发。
我平时偶尔会打打Dota2,在Dota里面,技能释放前会有一个地面贴花效果来作为范围的显示,比如深渊领主的这个技能,如下
我们可以看到技能范围特效是可以投射到场景地面和物体上(比如树木),这个在Unity中如何去实现呢?本文我以URP渲染管线为例,讲一下这个技能地面贴花效果的制作过程吧~
注:本文我使用的
Unity版本为2021.3.1f1c1,Universal RP版本为12.1.6
二、环境准备
1、URP环境准备
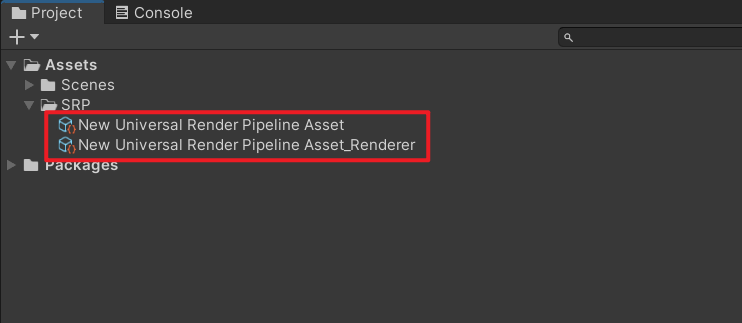
首先通过PackageManager安装Universal RP,在Project窗口中右键鼠标,点击菜单Create / Rendering / URP Asset (with Universal Renderer),
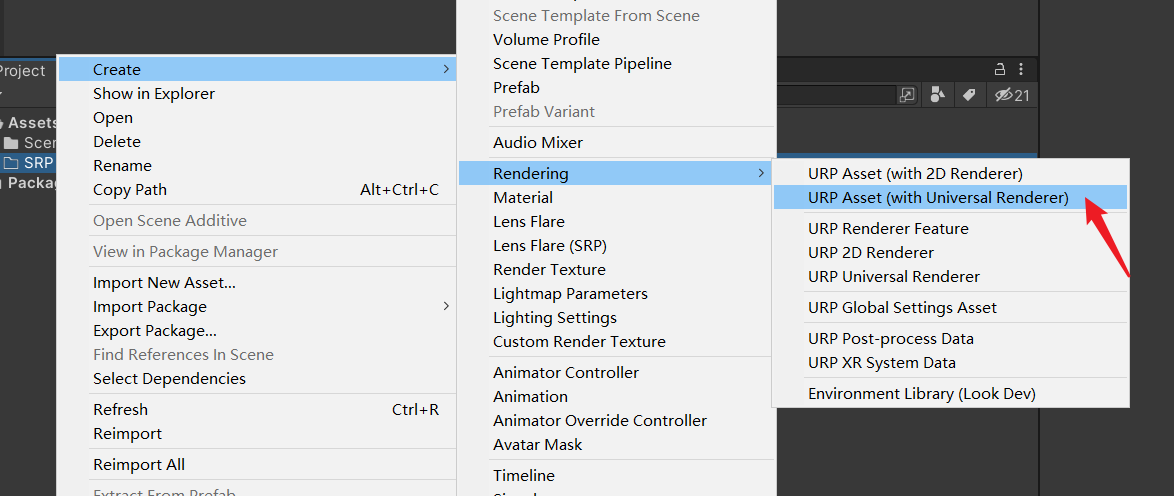
此时会创建出两个文件,如下
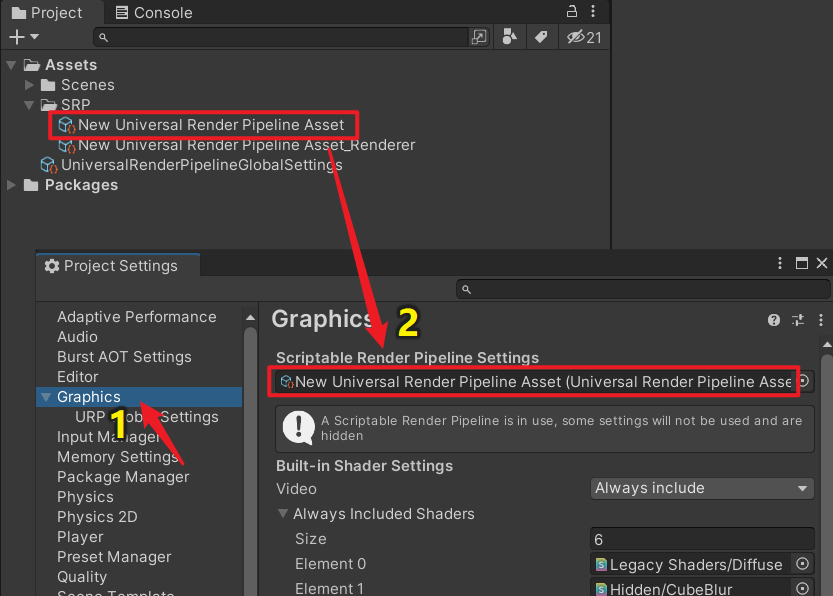
打开Project Settings窗口,点击Graphics,把Uinversal Render Pipeline Asset文件拖给Scriptable Render Pipeline Settings,如下
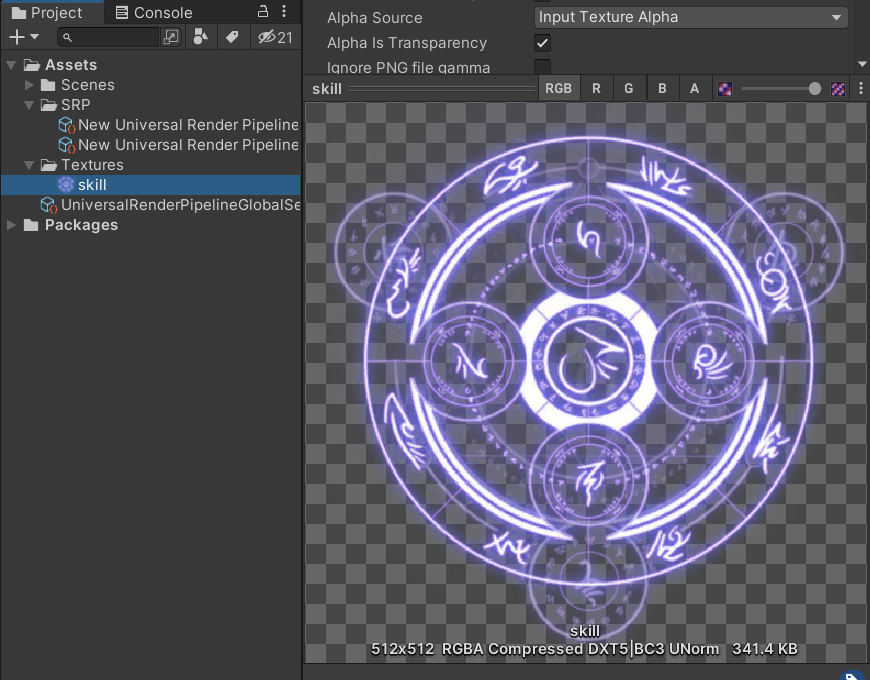
2、技能范围图案
接着我们去找一张技能范围的图案,我找了一张这样的,
接下来就是具体的实现过程了。有两个方案,下面我分别给大家讲解一下。
二、方案一:写Shader实现
1、Shader脚本:UrpDecal.shader
我在GitHub上看到有个外国小哥写了个URP渲染管线的贴花Shader,
GitHub地址:https://github.com/ColinLeung-NiloCat/UnityURPUnlitScreenSpaceDecalShader
我给他的Shader添加了中文注释,方便大家阅读,如下
// see README here:
// github.com/ColinLeung-NiloCat/UnityURPUnlitScreenSpaceDecalShader
Shader "Universal Render Pipeline/NiloCat Extension/Screen Space Decal/Unlit"
{
Properties
{
[Header(Basic)]
\_MainTex("Texture", 2D) = "white" {}
[HDR]\_Color("\_Color (default = 1,1,1,1)", color) = (1,1,1,1)
[Header(Blending)]
// BlendMode官方手册:https://docs.unity3d.com/ScriptReference/Rendering.BlendMode.html
// 混合模式
[Enum(UnityEngine.Rendering.BlendMode)]\_SrcBlend("\_SrcBlend (default = SrcAlpha)", Float) = 5 // 5 = SrcAlpha
[Enum(UnityEngine.Rendering.BlendMode)]\_DstBlend("\_DstBlend (default = OneMinusSrcAlpha)", Float) = 10 // 10 = OneMinusSrcAlpha
[Header(Alpha remap(extra alpha control))]
\_AlphaRemap("\_AlphaRemap (default = 1,0,0,0) \_\_\_\_\_alpha will first mul x, then add y (zw unused)", vector) = (1,0,0,0)
[Header(Prevent Side Stretching(Compare projection direction with scene normal and Discard if needed))]
[Toggle(_ProjectionAngleDiscardEnable)] \_ProjectionAngleDiscardEnable("\_ProjectionAngleDiscardEnable (default = off)", float) = 0
\_ProjectionAngleDiscardThreshold("\_ProjectionAngleDiscardThreshold (default = 0)", range(-1,1)) = 0
[Header(Mul alpha to rgb)]
[Toggle]\_MulAlphaToRGB("\_MulAlphaToRGB (default = off)", Float) = 0
[Header(Ignore texture wrap mode setting)]
[Toggle(_FracUVEnable)] \_FracUVEnable("\_FracUVEnable (default = off)", Float) = 0
//====================================== 在常规的用例中,通常可以忽略下面这些设置 =====================================================================
[Header(Stencil Masking)]
// https://docs.unity3d.com/ScriptReference/Rendering.CompareFunction.html
\_StencilRef("\_StencilRef", Float) = 0
[Enum(UnityEngine.Rendering.CompareFunction)]\_StencilComp("\_StencilComp (default = Disable) \_\_\_\_\_Set to NotEqual if you want to mask by specific \_StencilRef value, else set to Disable", Float) = 0 //0 = disable
[Header(ZTest)]
// https://docs.unity3d.com/ScriptReference/Rendering.CompareFunction.html
// 默认Disable, 因为我们需要确保即使相机进入贴花立方体体积,贴花渲染也正确,尽管默认禁用ZTest将阻止EarlyZ(不利于GPU性能)
[Enum(UnityEngine.Rendering.CompareFunction)]\_ZTest("\_ZTest (default = Disable) \_\_\_\_\_to improve GPU performance, Set to LessEqual if camera never goes into cube volume, else set to Disable", Float) = 0 //0 = disable
[Header(Cull)]
// CullMode官方手册: https://docs.unity3d.com/ScriptReference/Rendering.CullMode.html
// 默认为Front, 因为我们需要确保即使相机进入贴花立方体体积,贴花渲染也正确
[Enum(UnityEngine.Rendering.CullMode)]\_Cull("\_Cull (default = Front) \_\_\_\_\_to improve GPU performance, Set to Back if camera never goes into cube volume, else set to Front", Float) = 1 //1 = Front
[Header(Unity Fog)]
[Toggle(_UnityFogEnable)] \_UnityFogEnable("\_UnityFogEnable (default = on)", Float) = 1
[Header(Support Orthographic camera)]
[Toggle(_SupportOrthographicCamera)] \_SupportOrthographicCamera("\_SupportOrthographicCamera (default = off)", Float) = 0
}
SubShader
{
// 关于tags的内容可以查阅官网手册:https://docs.unity3d.com/Manual/SL-SubShaderTags.html
// 为了避免渲染顺序问题, Queue必须 >= 2501, 它位于透明队列中
// 在透明队列中,Unity总是从后到前渲染
// 2500以下是不透明物体队列,会进行渲染优化,比如被遮住的就剔除掉不进行渲染
// 2500以上是透明物体队列,它会根据距离摄像机的距离进行排序
// 从最远的开始渲染,到最近的结束
// 天空盒被渲染在所有不透明和透明物体之间
// "Queue" = "Transparent-499" 即 "Queue" = "2501", 使得它早于所有透明物体进行渲染
Tags { "RenderType" = "Overlay" "Queue" = "Transparent-499" "DisableBatching" = "True" }
Pass
{
Stencil
{
Ref[_StencilRef]
Comp[_StencilComp]
}
Cull[_Cull]
ZTest[_ZTest]
// 为了支持透明度混合,关闭深度写入
ZWrite off
Blend[_SrcBlend][_DstBlend]
HLSLPROGRAM
#pragma vertex vert
#pragma fragment frag
// 雾效
#pragma multi\_compile\_fog
// 为了使用 ddx() & ddy()
#pragma target 3.0
#pragma shader\_feature\_local\_fragment \_ProjectionAngleDiscardEnable
#pragma shader\_feature\_local \_UnityFogEnable
#pragma shader\_feature\_local\_fragment \_FracUVEnable
#pragma shader\_feature\_local\_fragment \_SupportOrthographicCamera
// 所有URP渲染管线的shader都必须引入这个Core.hlsl
// 它包含内置shader的变量,比如光照相关的变量,文档:https://docs.unity3d.com/Manual/SL-UnityShaderVariables.html
// 同时它也包含很多工具方法
#include "Packages/com.unity.render-pipelines.universal/ShaderLibrary/Core.hlsl"
struct appdata
{
// 模型空间下的坐标,OS: Object Space
float3 positionOS : POSITION;
};
struct v2f
{
// 齐次裁剪空间坐标,CS: Clip Space
float4 positionCS : SV_POSITION;
// 屏幕坐标
float4 screenPos : TEXCOORD0;
// xyz分量: 表示viewRayOS, 即模型空间 (Object Space)下的摄像机到顶点的射线
// w分量: 拷贝positionVS.z的值,即观察空间 (View Space) 下的顶点坐标的z分量
float4 viewRayOS : TEXCOORD1;
// rgb分量:表示模型空间下的摄像机坐标,
// a分量:表示雾的强度
float4 cameraPosOSAndFogFactor : TEXCOORD2;
};
sampler2D _MainTex;
sampler2D _CameraDepthTexture;
// 支持SRP Batcher
CBUFFER\_START(UnityPerMaterial)
float4 _MainTex_ST;
float _ProjectionAngleDiscardThreshold;
half4 _Color;
half2 _AlphaRemap;
half _MulAlphaToRGB;
CBUFFER_END
// 顶点着色器
v2f vert(appdata input)
{
v2f o;
// VertexPositionInputs包含多个空间坐标系中的位置(world, view, homogeneous clip space, ndc)
// Unity编译器将剥离所有未使用的引用 (比如你没有使用view space)
// 因此,这种结构具有更大的灵活性,无需额外的成本
VertexPositionInputs vertexPositionInput = GetVertexPositionInputs(input.positionOS);
// 得到齐次裁剪空间 (clip space) 下的坐标
o.positionCS = vertexPositionInput.positionCS;
// Unity雾效
#if \_UnityFogEnable
o.cameraPosOSAndFogFactor.a = ComputeFogFactor(o.positionCS.z);
#else
o.cameraPosOSAndFogFactor.a = 0;
#endif
// 准备深度纹理的屏幕空间UV
o.screenPos = ComputeScreenPos(o.positionCS);
// 观察空间 (view space) 坐标,即在观察空间中摄像机到顶点的射线向量
float3 viewRay = vertexPositionInput.positionVS;
// [注意,这一步很关键]
//=========================================================
// viewRay除以z分量必须在片元着色器中执行,不能在顶点着色器中执行! (由于光栅化变化插值的透视校正)
// 我们先把viewRay.z存到o.viewRayOS.w中,等到片元着色器阶段在进行处理
o.viewRayOS.w = viewRay.z;
//=========================================================
// unity的相机空间是右手坐标系(z轴负方向指向屏幕),我们希望片段着色器中z射线是正的,所以取反
viewRay \*= -1;
// 观察空间到模型空间的变换矩阵
float4x4 ViewToObjectMatrix = mul(UNITY_MATRIX_I_M, UNITY_MATRIX_I_V);
// 观察空间 (view space) 转模型空间 (object space)
o.viewRayOS.xyz = mul((float3x3)ViewToObjectMatrix, viewRay);
// 模型空间下摄像机的坐标
o.cameraPosOSAndFogFactor.xyz = mul(ViewToObjectMatrix, float4(0,0,0,1)).xyz;
return o;
}
half4 frag(v2f i) : SV_Target
{
// [注意,这一步很关键]
//========================================================================
// 去齐次
i.viewRayOS.xyz /= i.viewRayOS.w;
//========================================================================
// 深度纹理的UV
float2 screenSpaceUV = i.screenPos.xy / i.screenPos.w;
// 对深度纹理进行采样,得到深度信息
float sceneRawDepth = tex2D(_CameraDepthTexture, screenSpaceUV).r;
float3 decalSpaceScenePos;
// 正交相机
#if \_SupportOrthographicCamera
// 我们必须支持正交和透视两种投影
// unity\_OrthoParams:
// unity\_OrthoParams是内置着色器遍历,存储的信息如下:
// x 是正交摄像机的宽度,y 是正交摄像机的高度,z 未使用,w 在摄像机为正交模式时是 1.0,而在摄像机为透视模式时是 0.0。
// 更多的内置着色器遍历可查看官方手册: https://docs.unity.cn/cn/2019.4/Manual/SL-UnityShaderVariables.html
// (这里要放 UNITY\_BRANCH 吗?) 我决定不放,原因看这里: https://forum.unity.com/threads/correct-use-of-unity\_branch.476804/
if(unity_OrthoParams.w)
{
// 如果是正交摄像机, \_CameraDepthTexture在[0,1]内线性存储场景深度
#if defined(UNITY\_REVERSED\_Z)
// 如果platform使用反向深度,要使用1-depth
// https://docs.unity3d.com/Manual/SL-PlatformDifferences.html
sceneRawDepth = 1-sceneRawDepth;
#endif
// 使用简单的lerp插值: lerp(near,far, [0,1] linear depth), 得到观察空间 (view space)的深度信息
float sceneDepthVS = lerp(_ProjectionParams.y, _ProjectionParams.z, sceneRawDepth);
// 投影
float2 viewRayEndPosVS_xy = float2(unity_OrthoParams.xy \* (i.screenPos.xy - 0.5) \* 2 /\* 裁剪空间 \*/);
// 构建观察空间坐标
float4 vposOrtho = float4(viewRayEndPosVS_xy, -sceneDepthVS, 1);
// 观察空间转世界空间
float3 wposOrtho = mul(UNITY_MATRIX_I_V, vposOrtho).xyz;
//----------------------------------------------------------------------------
// 世界空间转模型空间 (贴花空间)
decalSpaceScenePos = mul(GetWorldToObjectMatrix(), float4(wposOrtho, 1)).xyz;
}
else
{
#endif
// 如果是透视相机,LinearEyeDepth将为用户处理一切
// 记住,我们不能使用LinearEyeDepth处理正交相机!
// \_ZBufferParams:
// 用于线性化 Z 缓冲区值。x 是 (1-远/近),y 是 (远/近),z 是 (x/远),w 是 (y/远)。
float sceneDepthVS = LinearEyeDepth(sceneRawDepth, _ZBufferParams);
// 在任何空间中,场景深度 = rayStartPos + rayDir \* rayLength
// 这里所有的数据在 模型空间 (object space) 或 贴花空间 (decal space)
// 注意,viewRayOS 不是一个单位向量,所以不要规一化它,它是一个方向向量,视图空间z的长度是1
decalSpaceScenePos = i.cameraPosOSAndFogFactor.xyz + i.viewRayOS.xyz \* sceneDepthVS;
#if \_SupportOrthographicCamera
}


**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Go语言开发知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618658159)**
}
[外链图片转存中...(img-vQNzTKpX-1715538559082)]
[外链图片转存中...(img-4Zh6vTLW-1715538559083)]
[外链图片转存中...(img-I8SWgUk2-1715538559083)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Go语言开发知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618658159)**















 5144
5144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









