






- 十字路口——“intersection-v0”
- 赛车道——“racetrack-v0”
详细文档可以参考这里:
https://highway-env.readthedocs.io/en/latest/
配置环境
安装好后即可在代码中进行实验(以高速公路场景为例):
import gym
import highway_env
%matplotlib inline
env = gym.make('highway-v0')
env.reset()
for _ in range(3):
action = env.action_type.actions_indexes["IDLE"]
obs, reward, done, info = env.step(action)
env.render()
运行后会在模拟器中生成如下场景:
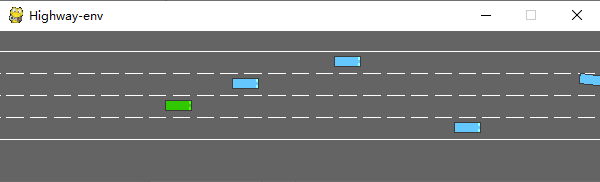
env类有很多参数可以配置,具体可以参考原文档。
训练模型
1、数据处理
(1)state
highway-env包中没有定义传感器,车辆所有的state (observations) 都从底层代码读取,节省了许多前期的工作量。根据文档介绍,state (ovservations) 有三种输出方式:Kinematics,Grayscale Image和Occupancy grid。
Kinematics
输出V*F的矩阵,V代表需要观测的车辆数量(包括ego vehicle本身),F代表需要统计的特征数量。例:
数据生成时会默认归一化,取值范围:[100, 100, 20, 20],也可以设置ego vehicle以外的车辆属性是地图的绝对坐标还是对ego vehicle的相对坐标。
在定义环境时需要对特征的参数进行设定:
config = \
{
"observation":
{
"type": "Kinematics",
#选取5辆车进行观察(包括ego vehicle)
"vehicles_count": 5,
#共7个特征
"features": ["presence", "x", "y", "vx", "vy", "cos_h", "sin_h"],
"features_range":
{
"x": [-100, 100],
"y": [-100, 100],
"vx": [-20, 20],
"vy": [-20, 20]
},
"absolute": False,
"order": "sorted"
},
"simulation_frequency": 8, # [Hz]
"policy_frequency": 2, # [Hz]
}
Grayscale Image
生成一张W*H的灰度图像,W代表图像宽度,H代表图像高度
Occupancy grid
生成一个WHF的三维矩阵,用W*H的表格表示ego vehicle周围的车辆情况,每个格子包含F个特征。
(2) action
highway-env包中的action分为连续和离散两种。连续型action可以直接定义throttle和steering angle的值,离散型包含5个meta actions:
ACTIONS_ALL = {
0: 'LANE_LEFT',
1: 'IDLE',
2: 'LANE_RIGHT',
3: 'FASTER',
4: 'SLOWER'
}
(3) reward
highway-env包中除了泊车场景外都采用同一个reward function:
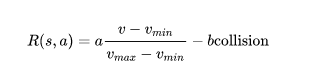
这个function只能在其源码中更改,在外层只能调整权重。
(泊车场景的reward function原文档里有)
2、搭建模型
DQN网络,我采用第一种state表示方式——Kinematics进行示范。由于state数据量较小(5辆车*7个特征),可以不考虑使用CNN,直接把二维数据的size[5,7]转成[1,35]即可,模型的输入就是35,输出是离散action数量,共5个。
import torch
import torch.nn as nn
from torch.autograd import Variable
import torch.nn.functional as F
import torch.optim as optim
import torchvision.transforms as T
from torch import FloatTensor, LongTensor, ByteTensor
from collections import namedtuple
import random
Tensor = FloatTensor
EPSILON = 0 # epsilon used for epsilon greedy approach
GAMMA = 0.9
TARGET_NETWORK_REPLACE_FREQ = 40 # How frequently target netowrk updates
MEMORY_CAPACITY = 100
BATCH_SIZE = 80
LR = 0.01 # learning rate
class DQNNet(nn.Module):
def __init__(self):
super(DQNNet,self).__init__()
self.linear1 = nn.Linear(35,35)
self.linear2 = nn.Linear(35,5)
def forward(self,s):
s=torch.FloatTensor(s)
s = s.view(s.size(0),1,35)
s = self.linear1(s)
s = self.linear2(s)
return s
class DQN(object):
def __init__(self):
self.net,self.target_net = DQNNet(),DQNNet()
self.learn_step_counter = 0
self.memory = []
self.position = 0
self.capacity = MEMORY_CAPACITY
self.optimizer = torch.optim.Adam(self.net.parameters(), lr=LR)
self.loss_func = nn.MSELoss()
def choose_action(self,s,e):
x=np.expand_dims(s, axis=0)
if np.random.uniform() < 1-e:
actions_value = self.net.forward(x)
action = torch.max(actions_value,-1)[1].data.numpy()
action = action.max()
else:
action = np.random.randint(0, 5)
return action
def push_memory(self, s, a, r, s_):
if len(self.memory) < self.capacity:
self.memory.append(None)
self.memory[self.position] = Transition(torch.unsqueeze(torch.FloatTensor(s), 0),torch.unsqueeze(torch.FloatTensor(s_), 0),\
torch.from_numpy(np.array([a])),torch.from_numpy(np.array([r],dtype='float32')))#
self.position = (self.position + 1) % self.capacity
def get_sample(self,batch_size):
sample = random.sample(self.memory,batch_size)
return sample
def learn(self):
if self.learn_step_counter % TARGET_NETWORK_REPLACE_FREQ == 0:
self.target_net.load_state_dict(self.net.state_dict())
self.learn_step_counter += 1
transitions = self.get_sample(BATCH_SIZE)
batch = Transition(*zip(*transitions))
b_s = Variable(torch.cat(batch.state))
b_s_ = Variable(torch.cat(batch.next_state))
b_a = Variable(torch.cat(batch.action))
b_r = Variable(torch.cat(batch.reward))
q_eval = self.net.forward(b_s).squeeze(1).gather(1,b_a.unsqueeze(1).to(torch.int64))
q_next = self.target_net.forward(b_s_).detach() #
q_target = b_r + GAMMA * q_next.squeeze(1).max(1)[0].view(BATCH_SIZE, 1).t()
loss = self.loss_func(q_eval, q_target.t())
self.optimizer.zero_grad() # reset the gradient to zero
loss.backward()
self.optimizer.step() # execute back propagation for one step
return loss
Transition = namedtuple('Transition',('state', 'next_state','action', 'reward'))
3、运行结果
各个部分都完成之后就可以组合在一起训练模型了,流程和用CARLA差不多,就不细说了。
初始化环境(DQN的类加进去就行了):
import gym
import highway_env
from matplotlib import pyplot as plt
import numpy as np
import time
config = \
{
"observation":
{
"type": "Kinematics",
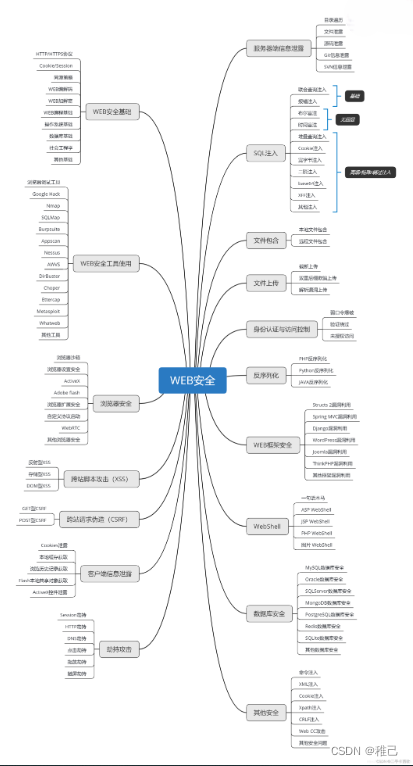
## 学习路线:
这个方向初期比较容易入门一些,掌握一些基本技术,拿起各种现成的工具就可以开黑了。不过,要想从脚本小子变成黑客大神,这个方向越往后,需要学习和掌握的东西就会越来越多以下是网络渗透需要学习的内容:
加入社区》https://bbs.csdn.net/forums/4304bb5a486d4c3ab8389e65ecb71ac0















 591
591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









