




Far3D: 突破远程3D目标检测的新境界
远程3D目标检测(Far-field 3D Detection, Far3Det)是自动驾驶领域中一个至关重要但又充满挑战的任务。随着自动驾驶技术的不断发展,对远距离障碍物的精准检测变得愈发重要,尤其是对于高速行驶的车辆而言,远程检测能够为车辆提供充足的反应和制动距离。然而,传统的3D检测方法在远距离目标上往往表现不佳,这主要是由于远距离目标的特征稀疏、尺度小、遮挡严重等原因造成的。
为了解决这一难题,来自中国科学院自动化研究所的研究团队提出了一种名为Far3D的创新方法,旨在突破远程3D目标检测的瓶颈。该方法在AAAI 2024会议上发表,引起了学术界的广泛关注。Far3D通过一系列巧妙的设计,有效解决了远距离目标检测中的计算开销大、收敛不稳定等问题,在多个benchmark上取得了令人瞩目的成果。
Far3D的核心创新
Far3D的成功主要得益于以下几个关键创新:
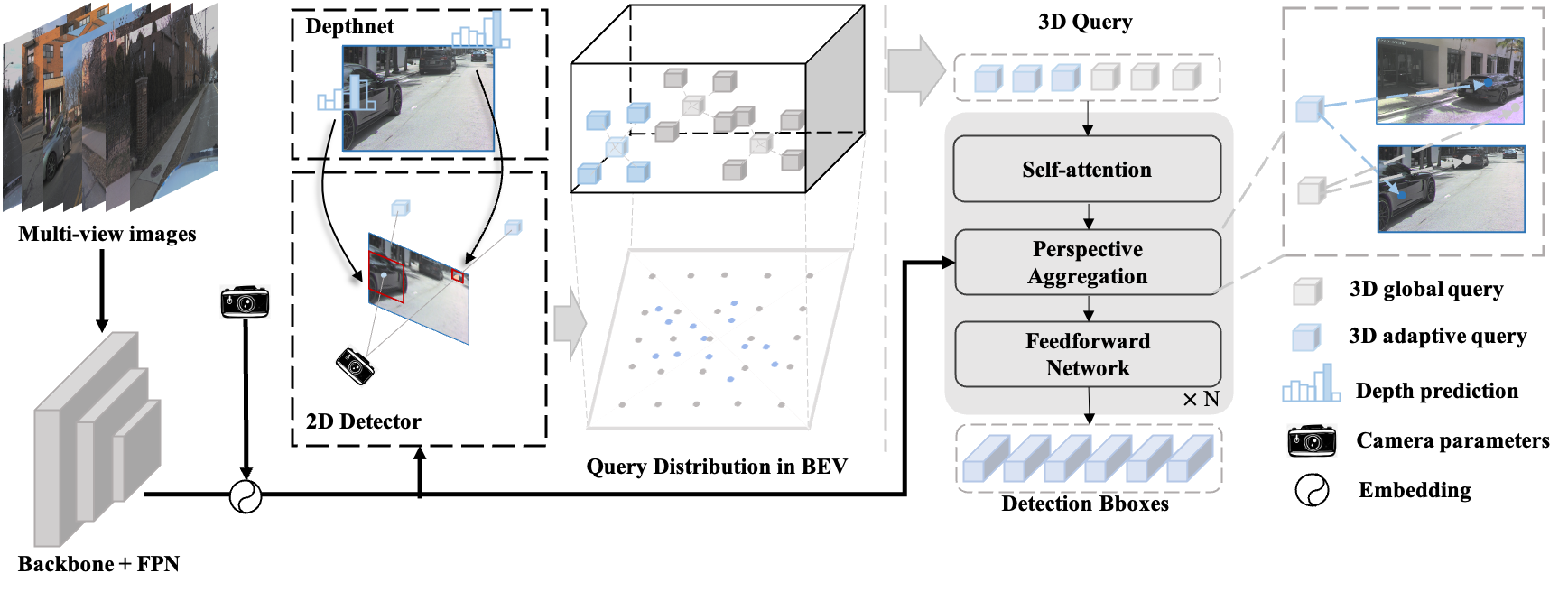
- 稀疏查询框架
Far3D采用了一种新颖的稀疏查询框架。与直接扩展现有方法到远距离不同,Far3D利用高质量的2D目标先验来生成3D自适应查询,这些查询与3D全局查询相辅相成。这种设计大大减少了计算开销,同时保证了检测的准确性。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 149
149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









