







自动驾驶汽车建模
包括:
自适应巡航控制系统ACC
自动车道偏置全功能
自动变道(ALC)全功能
结合控制模型与MATLAB路径跟踪控制系统
协同自适应巡航控制
巡航控制系统
自定义组合控制模型
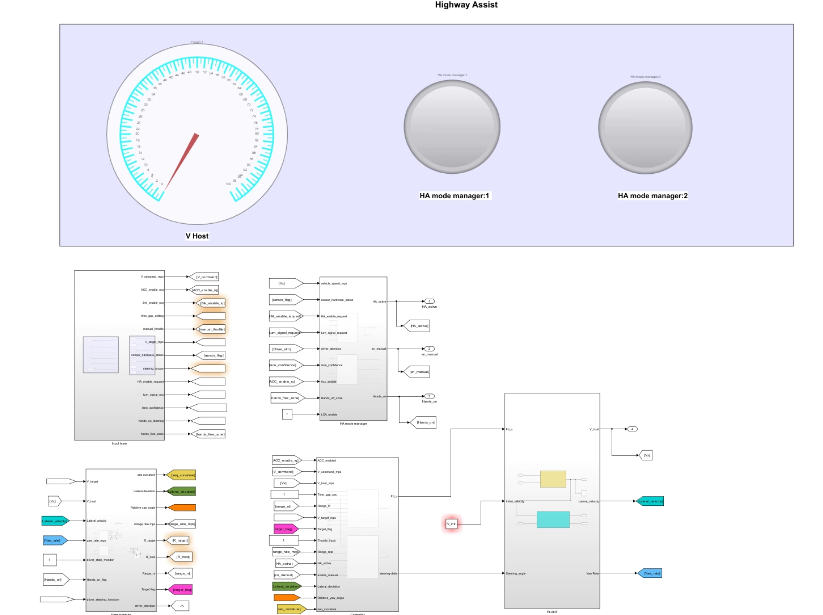
高速辅助全功能
车道中心辅助全功能
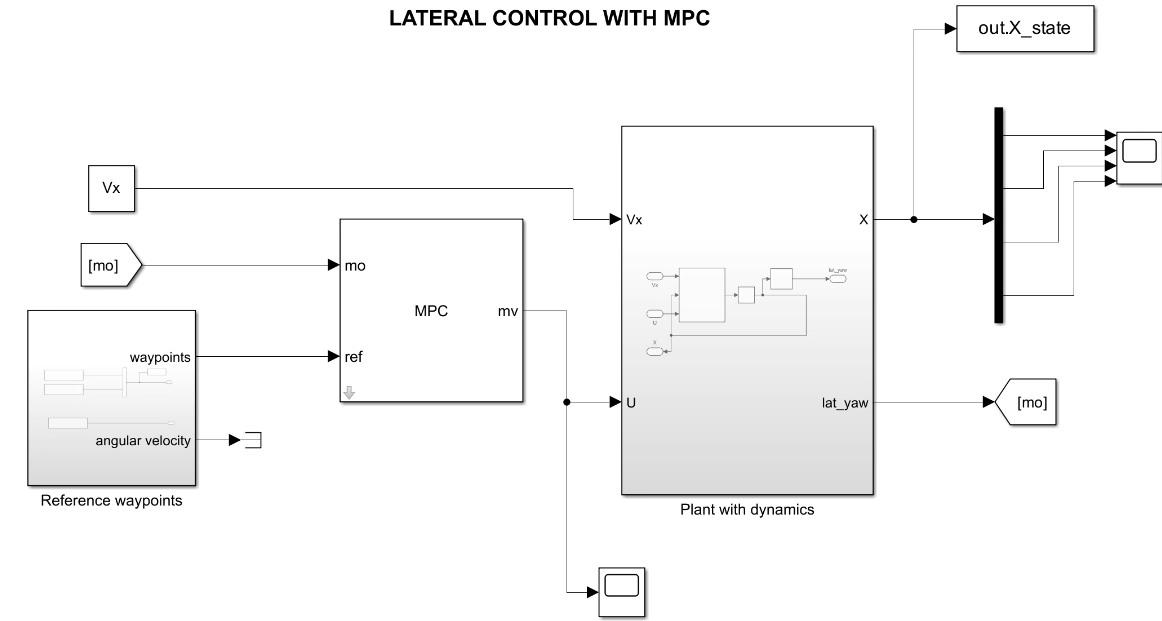
带模型预测控制MPC的横向控制
纯追踪控制
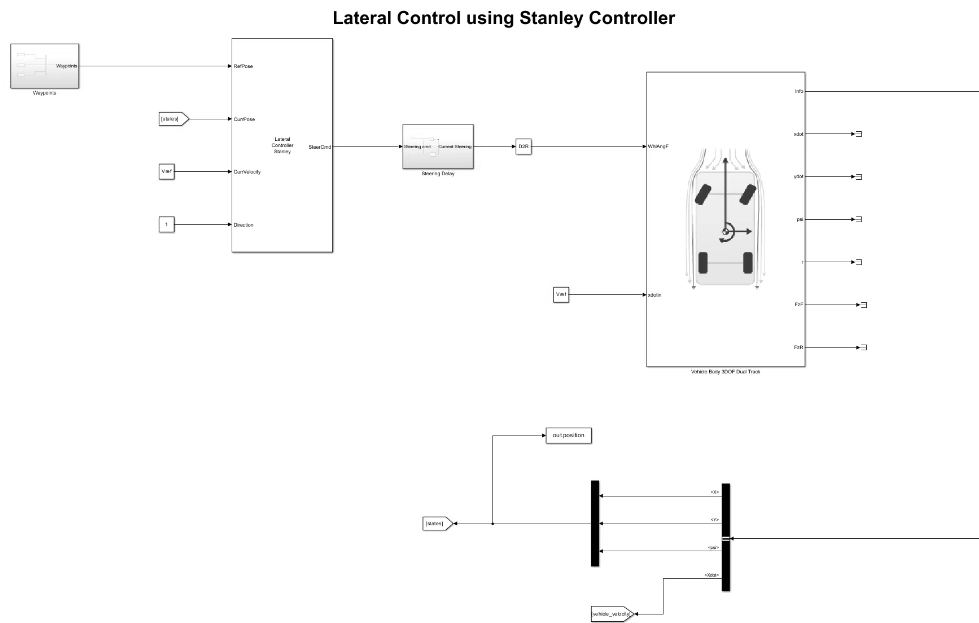
几何路径跟踪控制(Stanley control)
车辆纵向动力学
文章目录
以下是基于Matlab/Simulink搭建自动驾驶汽车建模的详细步骤和代码实现。我们将使用Simulink中的模块以及Matlab脚本来完成一个简单的自动驾驶汽车模型,包括车辆动力学、路径规划、传感器模拟(如激光雷达或摄像头)以及控制算法。
1. 系统设计概述
一个典型的自动驾驶汽车模型通常包括以下几个部分:
- 车辆动力学模型:描述车辆的运动学或动力学行为。
- 传感器模拟:模拟激光雷达、摄像头或其他传感器数据。
- 路径规划与决策:生成参考路径并进行轨迹跟踪。
- 控制器设计:实现车辆的速度和转向控制。
2. Simulink 模型搭建
2.1 车辆动力学模型
我们使用车辆运动学模型来描述车辆的行为。运动学模型的基本公式如下:
[
\begin{aligned}
\dot{x} &= v \cdot \cos(\theta) \
\dot{y} &= v \cdot \sin(\theta) \
\dot{\theta} &= \frac{v}{L} \cdot \tan(\delta)
\end{aligned}
]
其中:
- (x, y) 是车辆的位置,
- (v) 是车速,
- (\theta) 是车辆的航向角,
- (\delta) 是前轮转角,
- (L) 是车辆轴距。
在 Simulink 中,可以使用 Integrator 和 Math Function 模块实现这些方程。
2.2 传感器模拟
我们可以使用 Simulink 的 Random Number 模块模拟噪声数据,并结合 Scope 或 XY Graph 显示传感器输出。例如,模拟激光雷达的距离测量数据。
2.3 路径规划
路径规划可以通过 Matlab 脚本生成一条参考路径,例如直线路径或曲线路径。然后在 Simulink 中使用 Lookup Table 或 Interpolation 模块实现路径跟踪。
2.4 控制器设计
使用 PID 控制器或 MPC(模型预测控制)实现车辆的速度和转向控制。Simulink 提供了内置的 PID Controller 和 MPC Controller 模块。
3. 代码实现
3.1 车辆动力学模型
创建一个名为 VehicleDynamics.slx 的 Simulink 模型,包含以下模块:
- 输入信号:
v(速度)、\delta(前轮转角)。 - 积分器:用于计算 (x, y, \theta)。
- 数学运算:实现运动学方程。
% 在命令窗口运行以下代码以生成车辆动力学模型
open_system('VehicleDynamics.slx');
3.2 路径规划
使用 Matlab 脚本生成参考路径。例如,生成一条沿正弦曲线的路径:
% 生成参考路径
t = linspace(0, 10, 100); % 时间范围
x_ref = t; % 参考路径 x 坐标
y_ref = sin(t); % 参考路径 y 坐标
% 绘制路径
figure;
plot(x_ref, y_ref, 'r--', 'LineWidth', 2);
xlabel('X Position');
ylabel('Y Position');
title('Reference Path');
grid on;
% 将路径保存到工作区
assignin('base', 'x_ref', x_ref);
assignin('base', 'y_ref', y_ref);
3.3 控制器设计
在 Simulink 中添加一个 PID 控制器模块,用于控制车辆的转向角度,使其跟踪参考路径。
% 配置 PID 控制器参数
pid_controller = pid(1, 0.1, 0.01); % P=1, I=0.1, D=0.01
save_system('ControllerDesign.slx');
4. 完整 Simulink 模型
将上述模块整合到一个完整的 Simulink 模型中,命名为 AutonomousVehicleModel.slx。该模型包括以下部分:
- 输入模块:速度和转向角度。
- 车辆动力学模块:实现运动学方程。
- 路径规划模块:生成参考路径。
- 控制器模块:实现轨迹跟踪。
- 输出模块:显示车辆位置和路径跟踪结果。
5. 运行与测试
- 打开 Simulink 模型
AutonomousVehicleModel.slx。 - 运行模型,观察车辆是否能够成功跟踪参考路径。
- 调整 PID 参数或路径规划算法,优化系统性能。
6. 扩展功能
- 添加激光雷达或摄像头模拟模块,实现障碍物检测。
- 使用深度学习工具箱(如 YOLO 或 SSD)进行目标识别。
- 集成 ROS(机器人操作系统)进行实时仿真。

















 2465
2465

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









