






MATLAB基于非线性MPC的无人机轨迹跟踪控制系统
商品内容
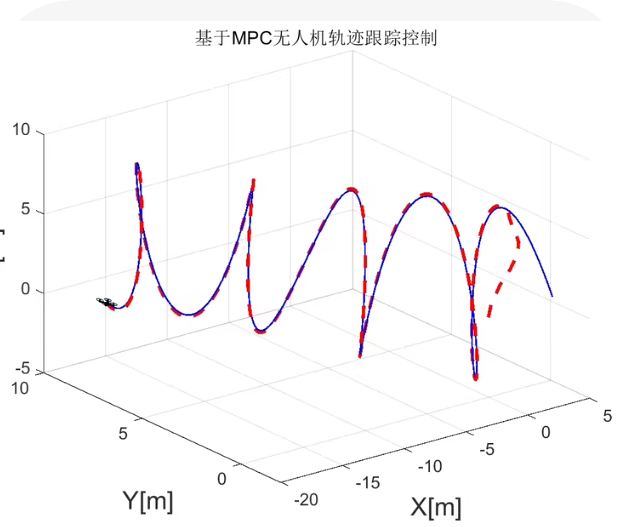
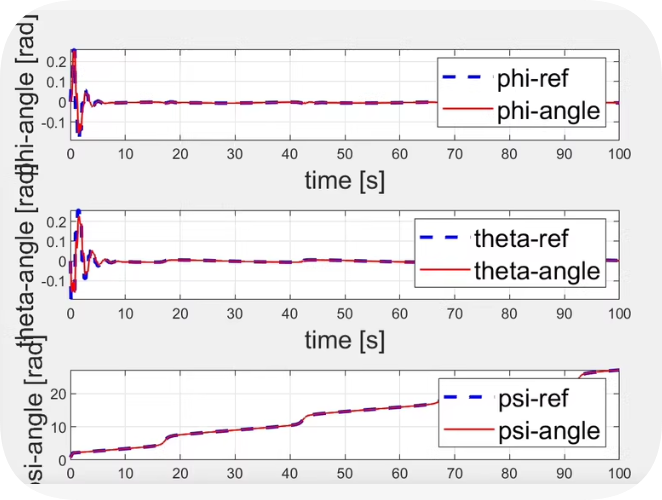
本项目为完整的无人机三维轨迹跟踪与姿态控制系统,采用非线性模型预测控制(MPC)算法,结合状态反馈线性化与LPV建模,实现在 MATLAB 中的动态飞行控制仿真与可视化。
无人机三维轨迹跟踪与姿态控制是一个复杂的系统工程,涉及到动力学建模、控制器设计、仿真验证等多个方面。非线性模型预测控制(MPC)是一种强大的控制策略,特别适用于具有多输入多输出(MIMO)、非线性特性的系统,如无人机。
】
1. 动力学模型
首先,我们需要建立无人机的动力学模型。为了简化问题,我们假设无人机是一个六自由度(6-DOF)刚体,其运动方程可以表示为:
x ˙ = v x y ˙ = v y z ˙ = v z v ˙ x = T m ⋅ ( sin ( ϕ ) cos ( θ ) + sin ( ψ ) cos ( ϕ ) sin ( θ ) ) v ˙ y = T m ⋅ ( − sin ( ϕ ) cos ( ψ ) + sin ( θ ) cos ( ϕ ) cos ( ψ ) ) v ˙ z = T m ⋅ ( − cos ( ϕ ) cos ( θ ) ) − g \begin{aligned} \dot{x} &= v_x \\ \dot{y} &= v_y \\ \dot{z} &= v_z \\ \dot{v}_x &= \frac{T}{m} \cdot (\sin(\phi)\cos(\theta) + \sin(\psi)\cos(\phi)\sin(\theta)) \\ \dot{v}_y &= \frac{T}{m} \cdot (-\sin(\phi)\cos(\psi) + \sin(\theta)\cos(\phi)\cos(\psi)) \\ \dot{v}_z &= \frac{T}{m} \cdot (-\cos(\phi)\cos(\theta)) - g \\ \end{aligned} x˙y˙z˙v˙xv˙yv˙z=vx=vy=vz=mT⋅(sin(ϕ)cos(θ)+sin(ψ)cos(ϕ)sin(θ))=mT⋅(−sin(ϕ)cos(ψ)+sin(θ)cos(ϕ)cos(ψ))=mT⋅(−cos(ϕ)cos(θ))−g
其中:
- $ x, y, z $ 是无人机在三维空间中的位置;
- $ v_x, v_y, v_z $ 是速度;
- $ T $ 是总推力;
- $ m $ 是无人机的质量;
- $ \phi, \theta, \psi $ 分别是滚转角、俯仰角和偏航角;
- $ g $ 是重力加速度。
2. 控制器设计:非线性MPC
我们将使用非线性MPC来控制无人机沿着给定的三维轨迹飞行。MPC的核心思想是在每个时间步长内求解一个优化问题,以预测未来的系统行为并计算最优控制输入。
MATLAB代码示例
% 非线性MPC无人机轨迹跟踪控制系统
clear; clc; close all;
% 参数设置
m = 1.0; % 无人机质量 (kg)
g = 9.81; % 重力加速度 (m/s^2)
dt = 0.1; % 时间步长 (s)
T_sim = 30; % 总仿真时间 (s)
N = 10; % 预测步数
% 初始状态 [x, y, z, vx, vy, vz]
initial_state = [0, 0, 0, 0, 0, 0];
% 目标轨迹参数
t_ref = 0:dt:T_sim;
x_ref = 5 * sin(0.1 * t_ref); % x方向正弦波
y_ref = 5 * cos(0.1 * t_ref); % y方向余弦波
z_ref = 2 * t_ref / T_sim; % z方向线性上升
% 定义MPC优化问题
mpcobj = nlmpc(6, 4); % 6个状态变量,4个控制输入(T, phi, theta, psi)
% 设置状态方程
mpcobj.Model.StateFcn = @(x, u, ~) stateEquations(x, u, m, g);
% 设置目标轨迹
mpcobj.Ts = dt;
mpcobj.PredictionHorizon = N;
mpcobj.ControlHorizon = 5;
% 设置权重矩阵
mpcobj.Weights.OutputVariables = [1, 1, 1, 0, 0, 0]; % 轨迹误差权重
mpcobj.Weights.ManipulatedVariablesRate = 0.1 * ones(1, 4); % 控制变化率权重
% 设置初始猜测
u0 = [0.5, 0, 0, 0]; % 初始控制输入
% 初始化状态
x = initial_state;
% 存储结果
positions = zeros(length(t_ref), 3);
controls = zeros(length(t_ref), 4);
% 仿真循环
for k = 1:length(t_ref)
% 获取当前参考轨迹点
ref = [x_ref(k), y_ref(k), z_ref(k)];
% 设置参考信号
mpcobj.Model.Nominal.X = [ref, 0, 0, 0];
% 求解MPC优化问题
[u, info] = nlmpcmove(mpcobj, x, u0);
% 更新状态
x = ode45(@(t, x) stateEquations(x, u, m, g), [0 dt], x)';
x = x(end, :);
% 记录数据
positions(k, :) = x(1:3);
controls(k, :) = u;
% 更新初始猜测
u0 = u;
end
% 绘制结果
figure;
plot3(positions(:,1), positions(:,2), positions(:,3), 'b', 'LineWidth', 2);
hold on;
plot3(x_ref, y_ref, z_ref, 'r--', 'LineWidth', 2);
xlabel('X'); ylabel('Y'); zlabel('Z');
title('无人机三维轨迹跟踪');
legend('实际轨迹', '参考轨迹');
grid on;
% 状态方程函数
function dxdt = stateEquations(x, u, m, g)
% 解析状态变量
x_pos = x(1);
y_pos = x(2);
z_pos = x(3);
vx = x(4);
vy = x(5);
vz = x(6);
% 解析控制输入
T = u(1); % 推力
phi = u(2); % 滚转角
theta = u(3); % 俯仰角
psi = u(4); % 偏航角
% 计算加速度
ax = T/m * (sin(phi)*cos(theta) + sin(psi)*cos(phi)*sin(theta));
ay = T/m * (-sin(phi)*cos(psi) + sin(theta)*cos(phi)*cos(psi));
az = T/m * (-cos(phi)*cos(theta)) - g;
% 返回导数
dxdt = [vx; vy; vz; ax; ay; az];
end
3. 说明
-
MPC控制器:本示例使用了MATLAB的
nlmpc工具箱来构建非线性MPC控制器。nlmpc允许用户直接定义非线性状态方程,并通过优化算法求解最优控制输入。 -
状态方程:状态方程描述了无人机的动力学行为,包括位置、速度以及加速度的变化。
-
轨迹跟踪:参考轨迹被定义为一个三维路径(例如正弦波、余弦波和线性上升),MPC控制器会根据这个参考轨迹调整无人机的控制输入,使其尽可能接近目标轨迹。
-
权重矩阵:MPC控制器中的权重矩阵决定了轨迹误差和控制变化率的重要性。可以根据具体需求进行调整。
-
仿真结果:最终绘制出无人机的实际轨迹与参考轨迹的对比图,展示了控制器的性能。
4. 扩展功能
-
避障:可以在MPC的目标函数中加入障碍物规避项,通过惩罚靠近障碍物的行为来实现避障。
-
LPV建模:如果需要更精确的控制,可以考虑使用线性参数变增益(LPV)建模方法,将非线性系统分解为多个局部线性模型,并在不同工作点之间进行切换。
-
可视化:可以使用MATLAB的动画功能(如
animatedline或scatter)来实时显示无人机的飞行过程。
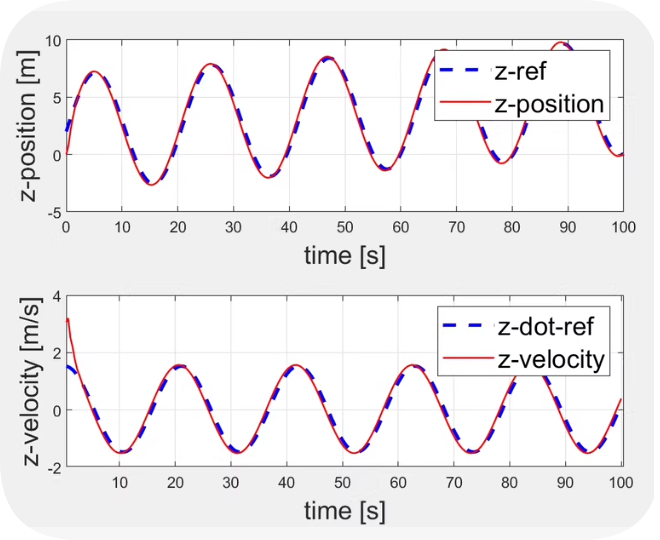
以下是一个基于PID控制的MATLAB代码示例,用于模拟无人机在z轴上的位置和速度跟踪:
% 无人机z轴位置和速度跟踪仿真
clear; clc; close all;
% 参数设置
m = 1.0; % 无人机质量 (kg)
g = 9.81; % 重力加速度 (m/s^2)
dt = 0.1; % 时间步长 (s)
T_sim = 100; % 总仿真时间 (s)
% PID控制器参数
Kp = 1.5;
Ki = 0.1;
Kd = 0.5;
% 初始状态 [z, z_dot]
initial_state = [0, 0];
% 目标轨迹参数
t_ref = 0:dt:T_sim;
z_ref = 5 * sin(0.2 * t_ref); % z方向正弦波参考轨迹
% 初始化变量
z_position = zeros(size(t_ref));
z_velocity = zeros(size(t_ref));
integral_error = 0;
previous_error = 0;
% 仿真循环
for k = 1:length(t_ref)
% 当前时间点
t = t_ref(k);
% 获取当前参考值
z_ref_k = z_ref(k);
% 计算误差
error = z_ref_k - initial_state(1);
% 积分项
integral_error = integral_error + error * dt;
% 微分项
derivative_error = (error - previous_error) / dt;
% PID控制律
control_input = Kp * error + Ki * integral_error + Kd * derivative_error;
% 更新状态
z_acceleration = (control_input - m * g) / m;
z_velocity(k) = initial_state(2) + z_acceleration * dt;
z_position(k) = initial_state(1) + z_velocity(k) * dt;
% 更新状态向量
initial_state = [z_position(k), z_velocity(k)];
% 更新上一时刻误差
previous_error = error;
end
% 计算参考速度
z_dot_ref = diff([0; z_ref]) / dt;
% 绘制结果
figure;
subplot(2, 1, 1);
plot(t_ref, z_ref, 'b--', 'LineWidth', 2);
hold on;
plot(t_ref, z_position, 'r', 'LineWidth', 2);
xlabel('time [s]');
ylabel('z-position [m]');
title('z-position');
legend('z-ref', 'z-position');
subplot(2, 1, 2);
plot(t_ref, [0; z_dot_ref], 'b--', 'LineWidth', 2);
hold on;
plot(t_ref, z_velocity, 'r', 'LineWidth', 2);
xlabel('time [s]');
ylabel('z-velocity [m/s]');
title('z-velocity');
legend('z-dot-ref', 'z-velocity');
说明
-
PID控制器:本示例使用了经典的PID控制策略来跟踪给定的参考轨迹。PID控制器通过调整比例、积分和微分项来最小化系统误差。
-
动力学模型:假设无人机在垂直方向上的运动只受到重力和控制输入的影响,其加速度可以通过牛顿第二定律计算得出。
-
参考轨迹:目标轨迹被定义为一个正弦波,表示无人机在z轴上的期望位置变化。
-
仿真结果:最终绘制出无人机的实际位置和速度与参考值的对比图,展示了控制器的性能。

















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









