










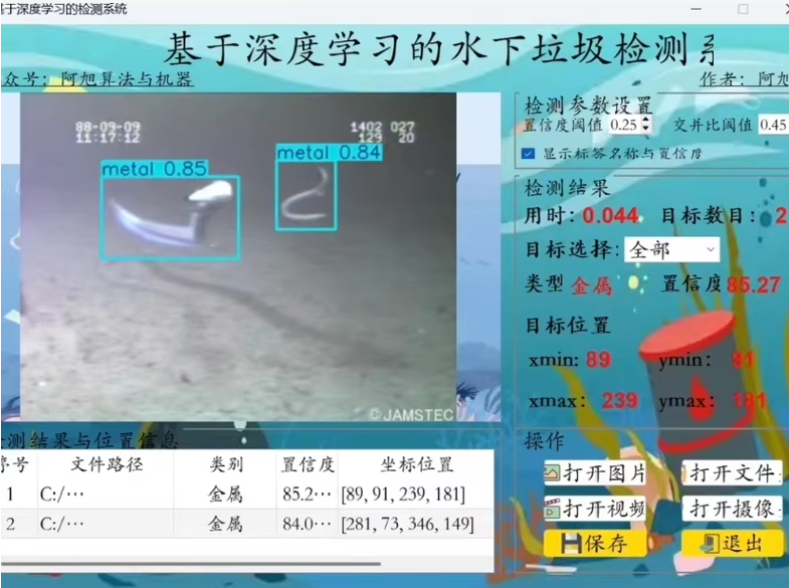
基于YOLOv8深度学习水下垃圾检测系统
内含7000张水下垃圾数据集
包含bio(生物),metal(金属),plastic(塑料),3类
也可自行替换模型,使用该界面做其他检测

提供一个大致的指南以及示例代码,帮助你了解如何使用YOLO模型进行水下垃圾的检测。
项目概述
本项目旨在开发一个基于YOLO模型的水下垃圾检测系统,能够识别和定位水下的垃圾物品。此过程涉及数据准备、模型训练、评估和部署等步骤。
步骤
1. 数据准备
首先需要收集和标注包含水下垃圾的图像或视频数据集。每个图像应标有边界框和对应的标签(例如:塑料瓶、渔网等)。可以考虑使用公开的数据集或自行收集并标注。
2. 环境配置
安装必要的依赖项。假设我们将使用YOLOv5作为例子。
pip install torch torchvision torchaudio
git clone https://github.com/ultralytics/yolov5 # 克隆YOLOv5仓库
cd yolov5
pip install -r requirements.txt # 安装依赖
3. 数据预处理
你需要创建一个YAML文件来描述你的数据集路径和类别信息。例如data/water_trash.yaml:
train: ./data/images/train/
val: ./data/images/val/
nc: 5 # 类别数量
names: ['plastic_bottle', 'fishing_net', 'can', 'bag', 'other']
4. 模型训练
修改YOLOv5的配置以适应你的任务,并开始训练。
# 使用YOLOv5s作为基础模型
python train.py --img 640 --batch 16 --epochs 50 --data water_trash.yaml --weights yolov5s.pt --cache
这行命令将启动训练流程,其中--img指定了输入图片的尺寸,--batch是批量大小,--epochs是训练轮数,--data指向你的数据配置文件,--weights指定预训练权重。
5. 模型评估
训练完成后,可以使用以下命令对模型进行评估:
python val.py --weights runs/train/exp/weights/best.pt --data water_trash.yaml --img 640
6. 部署
你可以使用训练好的模型来进行推理。
from models.experimental import attempt_load
from utils.general import non_max_suppression, scale_coords
from utils.torch_utils import select_device
# 加载模型
device = select_device('')
model = attempt_load('runs/train/exp/weights/best.pt', map_location=device)
model.eval()
# 假设image为你的输入图像
# 推理逻辑...
注意事项
- 上述代码片段是为了说明目的而简化了的示例。实际应用中可能需要根据具体情况调整。
- YOLOv8的具体实现细节可能会有所不同,请根据官方文档进行相应的调整。
- 对于特定的应用场景,可能还需要对模型进行微调,以提高识别精度。

















 1168
1168

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









