






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
💥1 概述
基于高斯过程的声场估计区域限制传感器布置研究
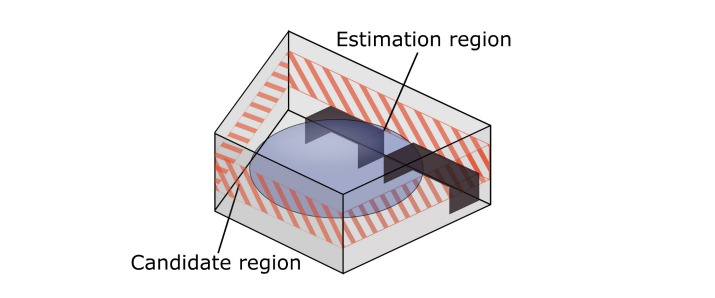
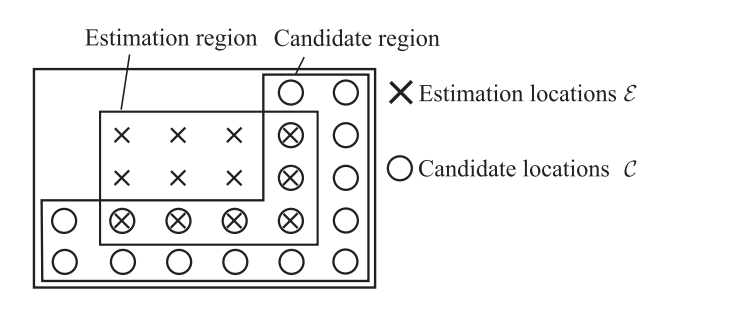
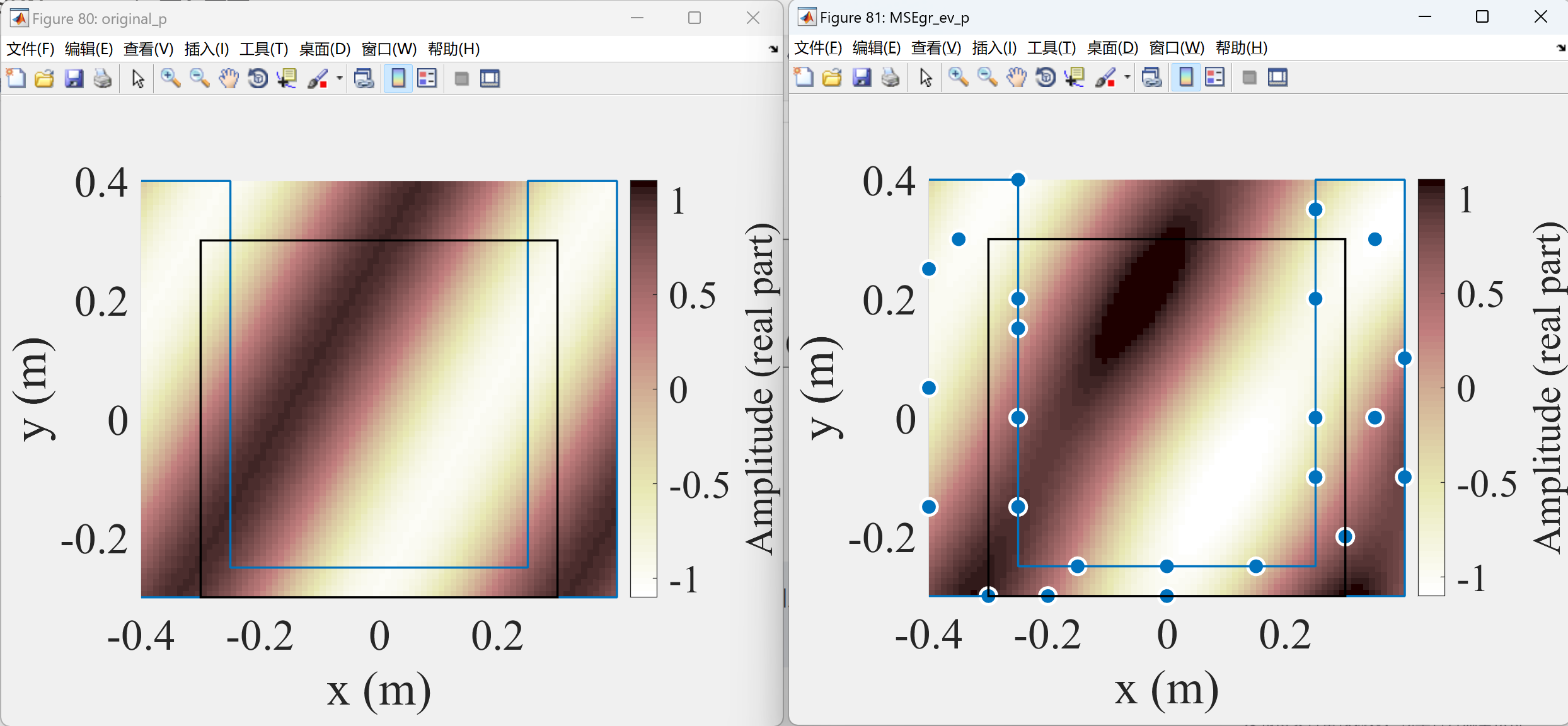
本文提出了基于高斯过程的场估计传感器布置方法。一般来说,传感器布置方法通过从预定义的候选位置中选择适当的位置来确定布置位置。已经提出了许多用于选择的标准,这些标准评估了候选位置处场的布置质量。这意味着这些传感器布置方法旨在找到能够准确估计候选位置处场的位置。然而,在实际情况下,候选传感器布置区域可能与场估计的目标区域不同。为了使传感器布置方法适用于这种情况,本文提出了两种基于均方误差和条件熵的传感器布置方法,可应用于传感器布置区域受任意限制的情况。在制定传感器布置问题后,导出了两种近似算法:贪婪算法和基于凸松弛的算法。还说明了所提方法在声场估计中的应用,并通过数值实验验证了其有效性。
估算或插值物理场,比如温度 [1],[2],声场 [3]–[5],和污染 [6],从传感器测量的数值中是一个具有许多应用的重要问题。例如,声场估计是一个在许多情况下使用的问题,例如使用扬声器或耳机重现声场,可视化和主动噪声控制。为了估算场,多个传感器被分布在目标区域中,并且整个场是根据它们的测量来估计的。
由于物理或经济约束,可以放置的传感器数量通常受到限制。在这种情况下,传感器的位置对估算精度有很大影响。因此,场估计中的一个主要问题是如何确定分布传感器的布置。为了解决这个问题,已经进行了大量关于传感器布置方法的研究。例如,在声学问题的背景下,传感器布置方法已经应用于声场估计 [7],麦克风阵列设计 [8],和声场控制 [9],[10]等问题。在大多数方法中,首先将感兴趣的区域离散化,然后从这些离散化的位置确定适当的传感器位置,直到达到限定数量。文献中提出了许多选择位置的标准,这些标准基于观测模型,例如高斯过程 (GPs) [11]–[13] 和有限维线性逆问题 [14]–[16]。尽管有各种各样的标准,但大多数评估离散化位置处的场,这些位置也用作候选传感器位置。详细文章见第4部分。
一、研究背景与意义
无线传感器网络(WSN)在声场估计领域展现出巨大潜力,通过部署低成本传感器节点,可实时获取空间声学数据,为智能建筑声学优化、工业噪声监测等提供关键信息。然而,实际应用中传感器布置面临多重限制:
- 物理空间限制:如古建筑监测中,文物保护要求限制传感器安装位置;工业场景中高温、高压、强电磁干扰等环境限制部署区域。
- 成本约束:大规模WSN部署总成本高,需在有限预算下实现高效布置。
- 能源限制:电池供电传感器在野外、深海等场景中难以更换电池,需降低能耗以延长寿命。
传统随机部署方式难以保证估计精度,而穷举搜索所有布置方案计算成本过高。因此,在区域限制条件下高效选择传感器位置成为WSN声场估计的关键问题。高斯过程(Gaussian Process, GP)作为一种非参数贝叶斯方法,为解决该问题提供了新思路。
二、高斯过程基本原理
高斯过程是一族随机变量的集合,其中任意有限个随机变量的联合分布服从多维正态分布。在声场估计中:
- 输入:传感器位置(空间坐标)。
- 输出:声压值。
- 建模过程:通过已知位置的声压数据,高斯过程学习输入(位置)与输出(声压)的关系,构建概率模型。对任意新位置,高斯过程不仅预测声压值,还提供预测的不确定性估计(如置信区间)。
核函数选择:
- 径向基核函数(RBF):衡量输入点距离,捕捉数据局部特征,应用广泛。
- 多项式核函数:适用于非线性关系建模。
三、高斯过程在声场估计中的优势
- 噪声处理能力:
- 传统插值方法(如最近邻、线性插值)对复杂声场分布和噪声干扰的估计精度低。
- 高斯过程将噪声视为模型一部分,通过调整核函数参数和噪声方差,适应不同噪声水平,提高估计精度。
- 预测置信区间:
- 提供预测结果的可靠性信息。窄置信区间表示高信心预测,宽置信区间提示不确定性,指导决策(如判断噪声是否超标或调整音响系统)。
四、区域限制条件下的挑战
- 计算复杂度高:
- 高斯过程计算复杂度与传感器数量立方成正比,大规模WSN中计算资源消耗大,实时性难以满足。
- 传感器位置选择复杂:
- 物理空间、成本、能源限制导致传感器需在有限区域内布置。
- 随机部署可能导致分布不均,关键区域未覆盖;穷举搜索计算成本过高。
五、传感器布置优化策略
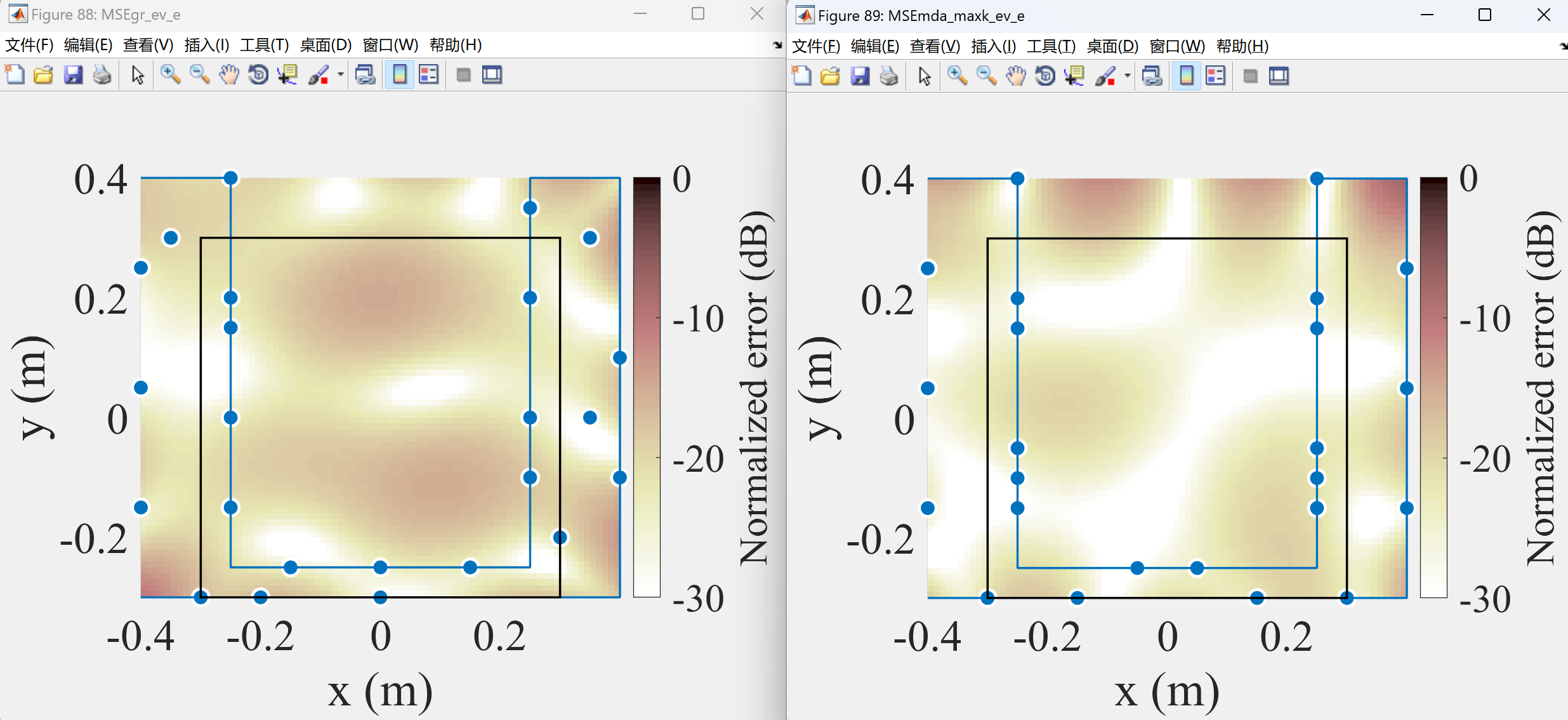
优化目标:在区域限制条件下最大化声场估计精度,常用衡量指标为预测方差和预测均方误差(MSE)。
优化方法:
- 贪婪算法:
- 迭代选择能最大程度降低预测方差或MSE的传感器位置,直至达到预设数量或满足约束。
- 优点:简单高效。
- 缺点:可能陷入局部最优解。
- 模拟退火算法:
- 概率性全局优化算法,通过温度参数控制搜索过程,避免局部最优。
- 优点:全局搜索能力强。
- 缺点:收敛速度较慢。
- 遗传算法:
- 基于自然选择机制,通过种群进化迭代优化传感器布置方案。
- 优点:全局搜索能力强,可处理复杂约束。
- 缺点:计算复杂度较高。
- 基于信息论的优化方法:
- 如最大熵方法,通过最大化信息增益或最小化不确定性选择传感器位置。
改进方向:
- 结合改进贪婪算法、混合算法等提高优化效率和精度。
- 考虑实际应用约束(如通信距离限制、障碍物存在),将约束条件融入优化模型。
六、实验与评估
- 仿真实验:
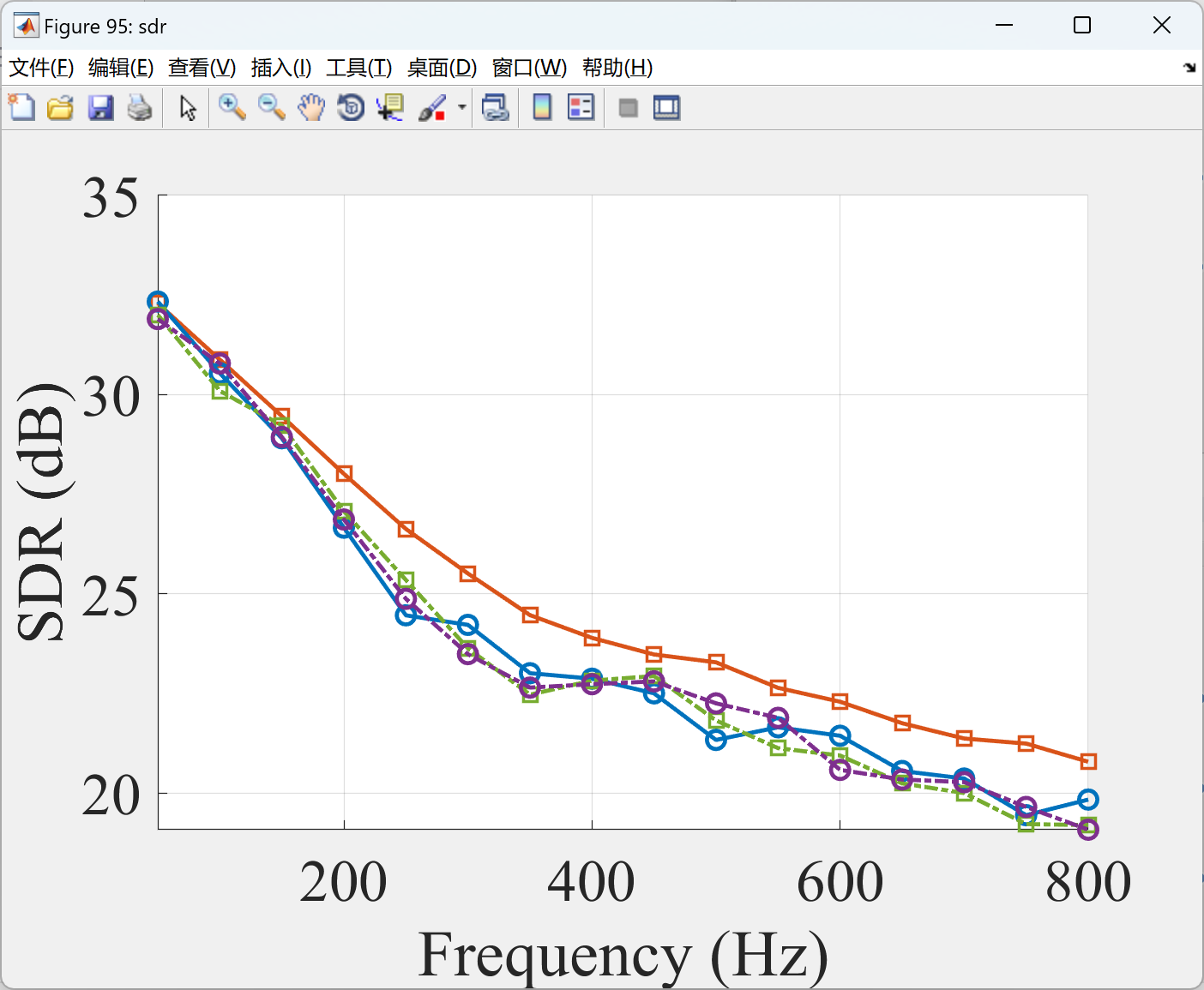
- 通过数值实验验证优化方法的有效性,比较不同算法的预测精度、计算时间和部署便利性。
- 实际部署实验:
- 在真实场景中部署传感器,评估优化方法的实际性能。
评估指标:
- 预测精度:预测方差、MSE。
- 计算时间:算法运行时间。
- 部署便利性:传感器布置的难易程度。
七、应用案例
- 智能建筑声学优化:
- 通过优化传感器布置,实时监测室内声场分布,调整音响系统参数以优化声学效果。
- 工业噪声监测:
- 在复杂工业场景中部署传感器,监测噪声水平,为噪声控制提供依据。
八、未来研究方向
- 高斯过程模型参数优化:
- 研究更高效的核函数参数调优方法,提高模型适应性。
- 更高效的优化算法:
- 开发适用于大规模WSN的全局优化算法,降低计算复杂度。
- 多模态传感器融合:
- 结合声学、温度、振动等多模态传感器数据,提高声场估计的全面性和准确性。
📚2 运行结果
部分代码:
%mic vs cost
for kk = 1:prm.freq_len
figure();
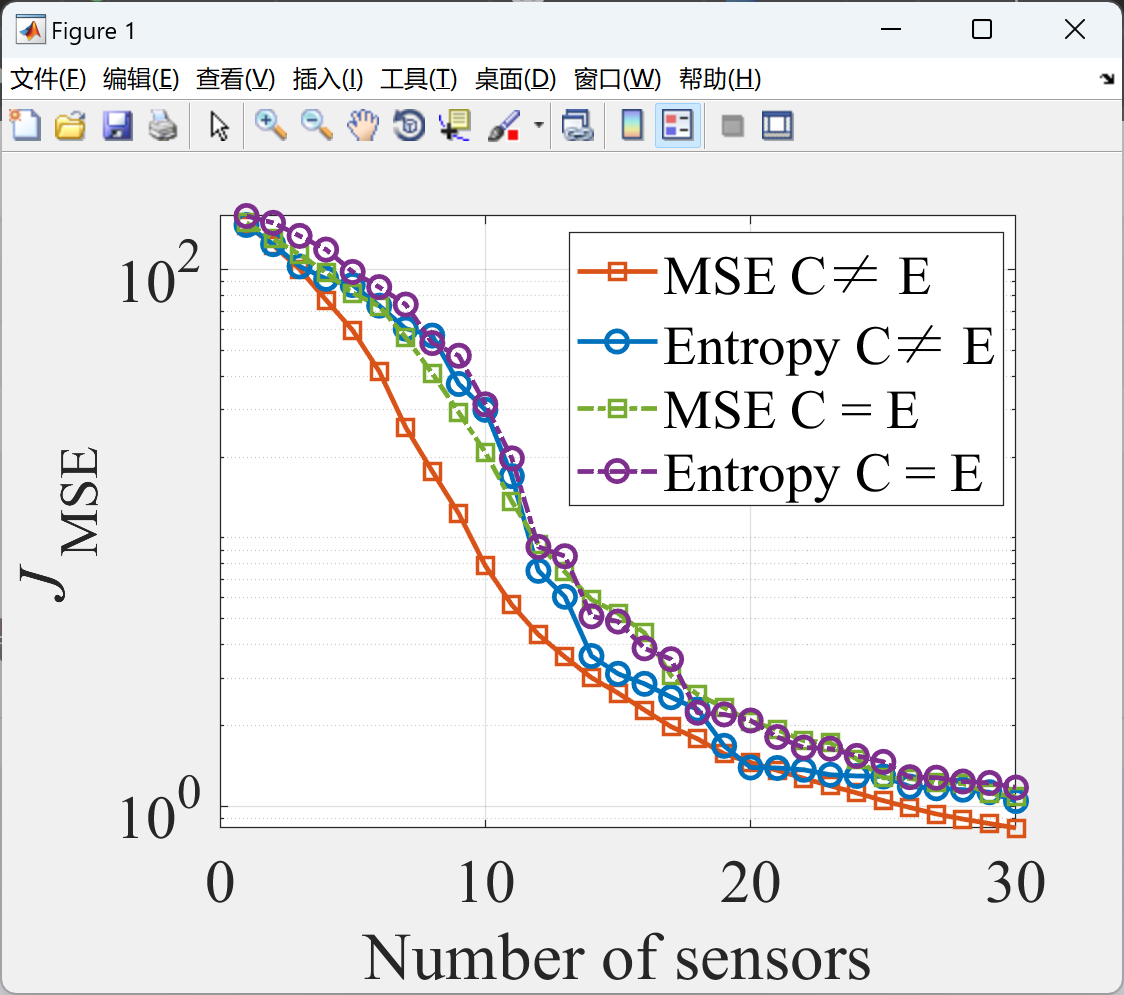
semilogy(MSEevcost_Aoptgr_ev(kk,:),'s-','Color', red, 'MarkerSize', Msize, 'DisplayName', 'MSE C\neq E');
hold on;
semilogy(MSEevcost_Doptgr_ev(kk,:),'o-','Color', blue, 'MarkerSize', Msize, 'DisplayName', 'Entropy C\neq E');
semilogy(MSEevcost_Aoptgr_cd(kk,:),'s-.','Color', green, 'MarkerSize', Msize, 'DisplayName', 'MSE C = E');
semilogy(MSEevcost_Doptgr_cd(kk,:),'o-.','Color', purple, 'MarkerSize', Msize, 'DisplayName', 'Entropy C = E');
hold off;
grid on;
xlabel('Number of sensors'); ylabel('\sl{J}_{\rm MSE}');
legend('Location','best');
figname = sprintf('%s/MSEcost_f%d.png',dir_name, prm.freq(kk));
saveas(gcf, figname);
figure();
hold on;
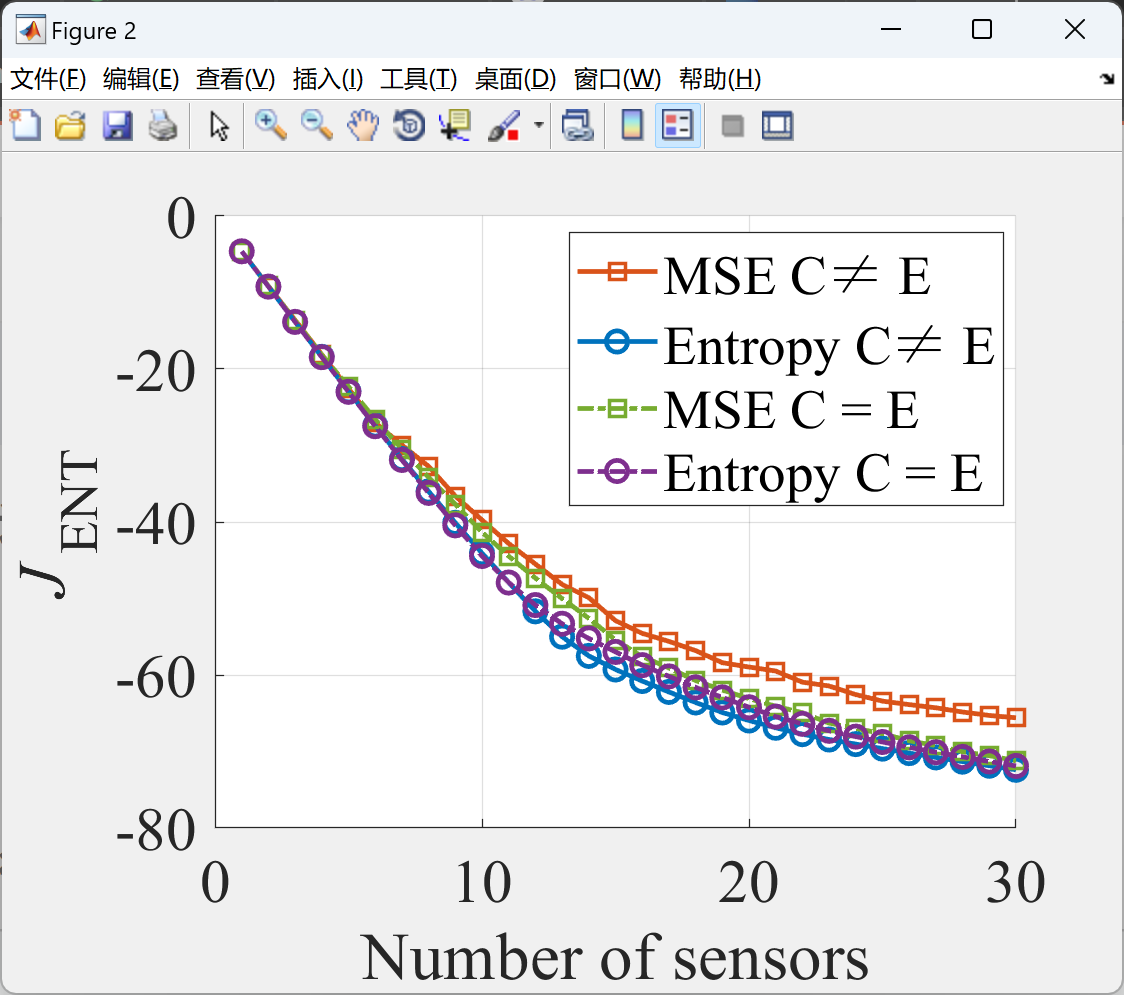
plot(ENTevcost_Aoptgr_ev(kk,:),'s-','Color', red, 'MarkerSize', Msize, 'DisplayName', 'MSE C\neq E');
plot(ENTevcost_Doptgr_ev(kk,:),'o-','Color', blue, 'MarkerSize', Msize, 'DisplayName', 'Entropy C\neq E');
plot(ENTevcost_Aoptgr_cd(kk,:),'s-.','Color', green, 'MarkerSize', Msize, 'DisplayName', 'MSE C = E');
plot(ENTevcost_Doptgr_cd(kk,:),'o-.','Color', purple, 'MarkerSize', Msize, 'DisplayName', 'Entropy C = E');
hold off;
grid on;
xlabel('Number of sensors'); ylabel('\sl{J}_{\rm ENT}');
legend('Location','best');
figname = sprintf('%s/ENTcost_f%d.png',dir_name, prm.freq(kk));
saveas(gcf, figname);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。

















 547
547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









