






【ROS】Navigation 导航系统概述
前言
本文主要阐述ros中导航系统的框架架构以及大致实现的原理,本部分内容比较简单,详情可见本文所附资料,不过多赘述
我的环境:
本教程使用的环境是:实体 ROS 小车,Ubuntu 18.04,ROS1 Melodic
参考资料:
Navigation 导航系统概述
本部分简要介绍 ROS 中的 Navigation 导航系统的整体架构与工作流程。
如果你是初学者,建议观看下方视频,快速理解导航系统的核心逻辑:
🎥 推荐视频:5分钟,看懂 ROS 的 Navigation 导航系统
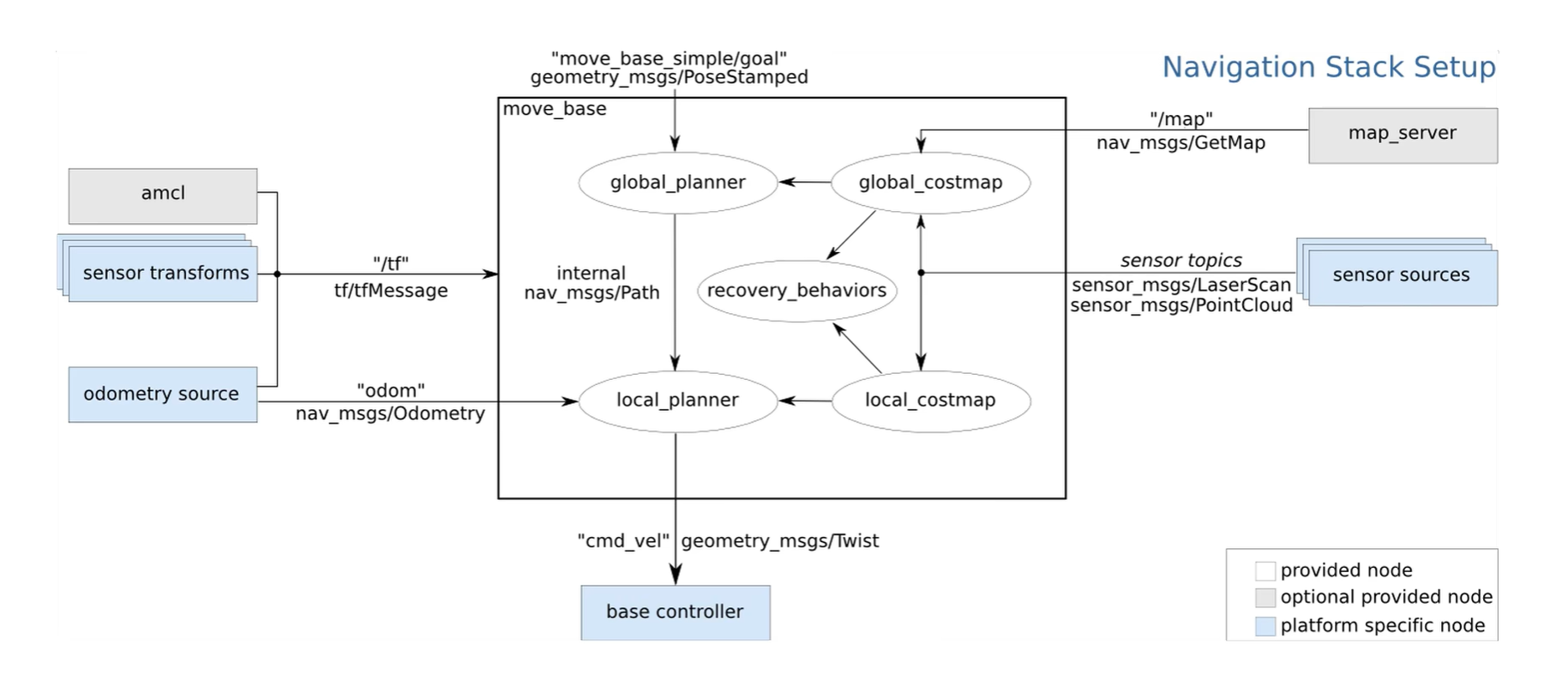
ROS 官方导航系统架构图
下图为 ROS 官方提供的导航系统结构图,展示了各模块间的关系和数据流:
类比理解导航系统
我们可以将机器人导航的过程类比为日常生活中的“人类导航”:
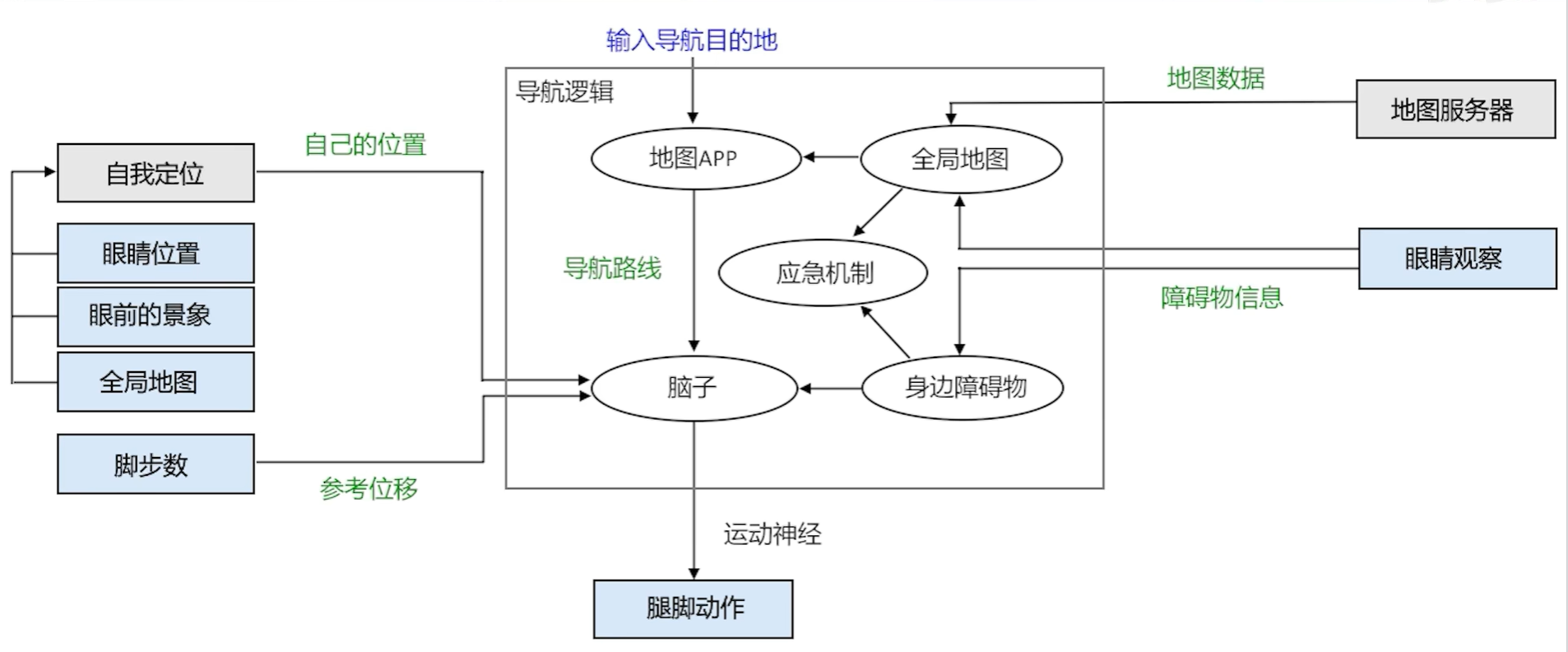
该部分内容请参考类比图进行理解,不再赘述。如有疑问,可以参考本章推荐的视频教程进行进一步理解。

















 1074
1074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









